一种可快速拆装的机器人线路连接装置及其连接方法
文献发布时间:2023-06-19 11:49:09
技术领域
本发明涉及机器人连接器技术领域,尤其涉及一种可快速拆装的机器人线路连接装置及其连接方法。
背景技术
现在的工业机器人是生产应用中必不可少的智能化设备,工业机器人的数据传输、信号传输,再到电源连接等,都需要功能可靠且可灵活对接的连接器,而且连接器的质量对于整个系统的性能具有决定性的作用。
连接器接口是工业机器人中普遍运用的一种连接形式,现今市面上的接口都要借助专门的工具才能实现安装或拆除,如果想临时更换接口设备或拆卸是非常不方便的。并且,工业机器人的连接器同时连接多种信号传输时,如果出现对接错误则会造成信号传输失败甚至线路烧毁的风险。
因此,需要一种可快速拆卸的接口以实现无工具情况下对设备进行快速安装与拆除,同时保证对接准确性的连接器接口。
发明内容
鉴于上述的分析,本发明旨在提供一种可快速拆装的机器人线路连接装置及其连接方法,用以解决现有大多数接口依赖于扳手等工具进行拆装,不够方便快速以及误插导致线路损坏的问题。
本发明的目的主要是通过以下技术方案实现的:
一种可快速拆装的机器人线路连接装置,包括:连接底座、连接法兰、电气连接插座和电气连接插头,电气连接插座设置在连接底座上,电气连接插头设置在连接法兰上,连接底座和连接法兰插接到位时,电气连接插座和电气连接插头同步插接到位。
进一步地,电气连接插座与连接底座同轴线,电气连接插头与连接法兰同轴线。
进一步地,连接接口还包括导向结构;导向结构包括:导向柱和导向孔;导向柱和导向孔分别设置在连接底座和连接法兰上。
进一步地,导向孔包括:第一导向孔和第二导向孔;导向柱包括:第一导向柱和第二导向柱;第一导向柱、第二导向柱分别与第一导向孔和第二导向孔相适配。
进一步地,第一导向孔和第二导向孔的尺寸不同。
进一步地,导向柱与导向孔设有多个,且多个导向柱或导向孔非对称设置。
进一步地,连接接口还包括锁紧结构;锁紧结构包括:设置在连接底座上的外螺纹和锁紧螺母。锁紧螺母套设在连接法兰上且能够相对连接法兰转动;锁紧螺母设置内螺纹,外螺纹与内螺纹实现螺纹连接。
进一步地,锁紧螺母的侧面设置锁定孔。
进一步地,锁定孔中安装螺钉,螺钉抵在连接底座上。
一种可快速拆装的机器人线路连接装置的连接方法,包括以下步骤:
步骤S1:将连接底座和连接法兰对插,同时电气连接插座和电气连接插头插接;
步骤S2:旋转锁紧螺母,使锁紧螺母与连接底座通过螺纹连接;
步骤S3:在锁定孔中拧入螺钉,完成连接接口的连接。
与现有技术相比,本发明的可快速拆装的机器人线路连接装置至少具有如下有益效果之一:
1.快速拆装;
本发明将电气连接插座和电气连接插头分别安装在连接底座和连接法兰中,只要连接底座和连接法兰插接到位,电气连接也同步插接到位,进一步通过锁紧螺母锁紧即可,结构简单,安装方便,有效提高连接效率。
2.安装可靠;
本发明将锁紧螺母套设在连接法兰上,且锁紧螺母与连接底座通过螺纹连接,防止接口断开,保证了连接接口的安装可靠性。
3.防止误插;
本发明在连接底座和连接法兰上分别设置防止误插的导向孔和导向柱,第一导向孔和第一导向柱配合,第二导向孔和第二导向柱配合,通过第一导向孔和第二导向孔非对称设计,有效防止误插损坏线路,安全性高。
本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
附图说明
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
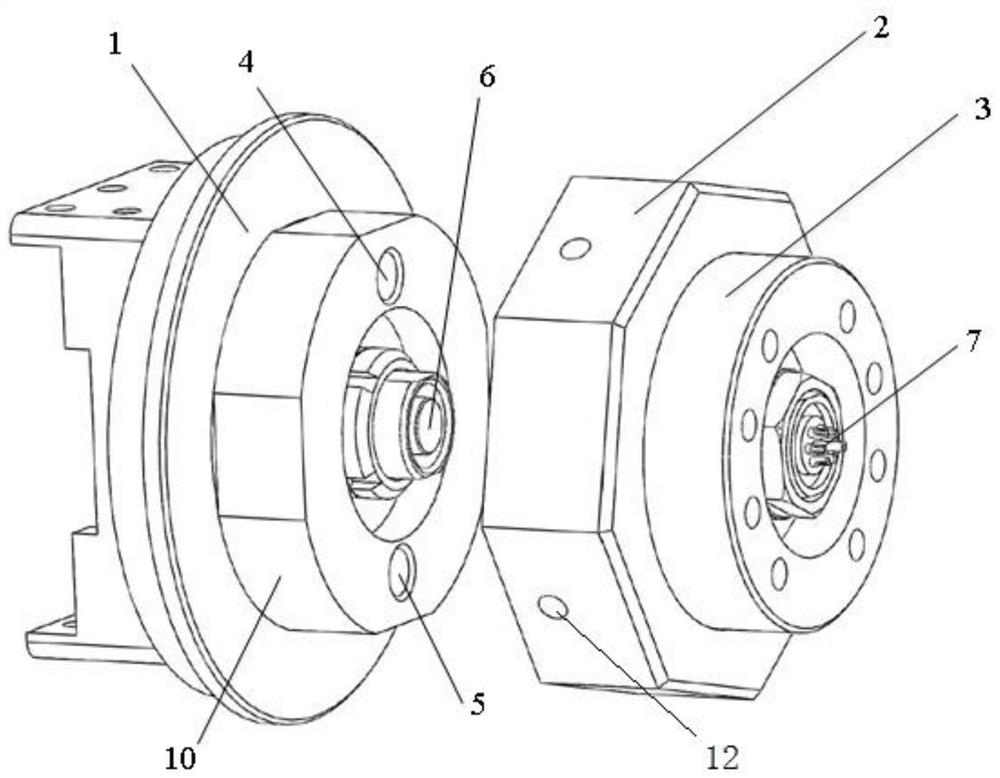
图1为本发明的可快速拆装的机器人线路连接装置的结构示意图一;
图2为本发明的可快速拆装的机器人线路连接装置的结构示意图二;
图3为本发明的可快速拆装的机器人线路连接装置的组装状态示意图;
图4为非对称设置的导向孔结构示意图;
图5为多个导向孔费对称设置的结构示意图。
附图标记:
1-连接底座;2-锁紧螺母;3-连接法兰;4-第一导向孔;5-第二导向孔;6-电气连接插座;7-电气连接插头;8-第一导向柱;9-第二导向柱;10-外螺纹;11-内螺纹;12-锁定孔。
具体实施方式
下面结合附图来具体描述本发明的优选实施例,其中,附图构成本发明一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
在本发明实施例的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接可以是机械连接,也可以是电连接可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
全文中描述使用的术语“顶部”、“底部”、“在……上方”、“下”和“在……上”是相对于装置的部件的相对位置,例如装置内部的顶部和底部衬底的相对位置。可以理解的是装置是多功能的,与它们在空间中的方位无关。
实施例1
本发明的一个具体实施例,如图1-5所示,公开了一种可快速拆装的机器人线路连接装置,包括:接口主体和连接组件;接口主体包括连接底座1和连接法兰3,连接底座1和连接法兰3为两端对插结构。连接组件包括导向结构、锁紧结构和电气连接结构;连接组件用于实现连接接口主体两端的连接底座1和连接法兰3的机械连接和电连接。
电气连接插座6和电气连接插头7分别安装在连接底座1和连接法兰3中,且电气连接插座6和连接底座1同轴线,电气连接插头7和连接法兰3同轴线,实现连接底座1和连接法兰3插接到位后,电气连接也同步插接到位.
进一步地,连接底座1的接口截面上设有至少两个导向孔,连接法兰3的端面上设有与导向孔对应的导向柱,通过导向柱和导向孔的配合,实现连接底座1和连接法兰3的精确对接。
本实施例中,导向孔包括:第一导向孔4和第二导向孔5;导向柱包括:第一导向柱8和第二导向柱9;其中第一导向柱8与第一导向孔4形状和尺寸相同,第二导向柱9和第二导向孔5结构和尺寸相同。
连接底座1上设置锁紧部,锁紧部的外径上设有外螺纹10,连接底座1的内部设有电气连接插座6;连接法兰3的外径上套设锁紧螺母2,内部设有电气连接插头7;
进一步地,锁紧螺母2能够相对于连接法兰3旋转,且连接法兰3的端部设置突出的卡环。卡环直径大于连接法兰3的直径,锁紧螺母2的内孔直径小于卡环直径,卡环用于防止锁紧螺母2脱离连接法兰3。
导向结构包括:连接底座1上设有的导向孔与连接法兰3上设有的导向柱。
其中,导向孔包括:第一导向孔4和第二导向孔5;导向柱包括:第一导向柱8和第二导向柱9。
连接接口插接时,第一导向柱8插入第一导向孔4中,第二导向柱9插入第二导向孔5中。
锁紧结构包括:由连接底座1上设有的外螺纹10,与连接法兰3上的锁紧螺母2构成。
其中,锁紧螺母2的内侧设置内螺纹11,连接接口的连接底座1和连接法兰3对接完成后,旋转锁紧螺母2实现外螺纹10和内螺纹11的配合,通过外螺纹10和内螺纹11的相互啮合,实现连接底座1和连接法兰3的锁紧固定。
电气连接结构包括:由连接底座1设有的电气连接插座6与设于连接法兰3内的电气连接插头7构成。
进一步地,电气连接结构上设置多组引脚,对电气连接件的引脚进行如下定义:①12V;②485A;③485B;④GND;⑤12V;⑥Signal;⑦GND。这套引脚定义适用于连接相机等多种设备、传感器。电气连接采用RS485通信方式,设有对应的通信协议。
进一步地,由于电气连接结构的引脚的结构强度不高,在冲击力的作用下容易损坏,因此,设计连接法兰3上的导向柱的轴向长度大于电气连接插头7的长度,以避免插拔过程中损坏插头。
也就是说,保证导向柱与导向孔的底部直接接触时,电气连接插座6与电气连接插头7不发生相互挤压,在遇到外力冲击的情况下,连接底座1上的导向孔限制导向柱的位移,使电气连接插座6与电气连接插头7无法相向移动,避免连接接口在遭到外力冲击的情况下电气连接插座6与电气连接插头7发生挤压破坏。
进一步地,电气连接插座6和电气连接插头7上设置多组引脚,引脚相互匹配实现信号传输,用于实现音频、视频、传感器信号以及动作信息等的信号传输,但是,如果电气连接插座6和电气连接插头7插接方向相反(插接失误)导致引脚匹配错误,则有可能导致线路损坏,为了避免线路损坏,保证插接的准确性,避免误插,需要设计防误插结构。
本实施例中,导向结构除了作为插接导向装置之外,同时作为防误插结构。
具体地,导向结构防误插具有两种形式:其一,采用导向孔和导向柱非对称设计防误插;其二,采用多个不同尺寸的导向孔防误插。
采用导向孔和导向柱非对称设计防误插:
1)设置第一导向孔4和第二导向孔5的形状不同,例如,分别为方形和圆形,实现第一导向孔4和第二导向孔5形状不对称;
2)设置第一导向孔4和第二导向孔5在连接底座1上位置不对称,所述位置不对称即第一导向孔4和第二导向孔5的中心连线不经过连接底座1的轴心(即连接底座1端面圆环的圆心),如图4所示。第一导向孔4和第二导向孔5在连接底座1上非对称设置,第一导向柱8与第一导向孔4配合,第二导向柱9与第二导向孔5配合,如果出现插接方向相反或偏差的情况,则第一导向柱8、第二导向柱9无法顺利插入第一导向孔4、第二导向孔5中,起到防止误插的效果,避免连接底座1和连接法兰3对插方向错误损坏线路。
进一步地,如图5所示,可以在连接底座1上设置多个不对称(非对称)的导向孔,并在连接法兰3设置对应的导向柱,如果连接底座1和连接法兰3的插接方向错误,则无法顺利插接,能够有效防止误插。
采用多个不同尺寸的导向孔防误插:
如图1所示,第一导向孔4和第二导向孔5均为圆形孔,设置第一导向孔4和第二导向孔5的直径不同,对应的,第一导向柱8和第二导向柱9直径不同。第一导向孔4和第二导向孔5的直径不同时,则连接底座1和连接法兰3插接方向错误时,则大直径的导向柱无法插入小直径的导向孔中,二者插接失败,起到防止误插的效果。
本实施例中,优选第一导向孔4和第二导向孔5位置不对称或尺寸不同的设计,来实现连接底座1和连接法兰3的防误插。
进一步地,为了保证锁紧螺母2对连接底座1和连接法兰3的可靠锁紧,在连接底座1的锁紧部的侧面设置卡止端面,在锁紧螺母的侧面设置锁定孔,锁紧螺母2的内螺纹11与连接底座1的外螺纹配合后,锁定孔与卡止端面位置相对;进一步地,在锁定孔中安装螺钉,通过拧紧螺钉,使螺钉抵在连接底座1的锁紧部的卡止端面上。
由于螺钉抵在连接底座1上,使锁紧螺母2不能相对于连接底座1转动,保证锁紧螺母2与连接底座1的可靠锁紧,进一步,保证连接底座1和连接法兰3不发生相对移动。
本实施例中,通过设置锁紧螺母2套设在连接法兰3上,且锁紧螺母2与连接底座1通过螺纹连接,锁紧螺母2对连接底座1和连接法兰3进行锁紧固定,限制连接底座1和连接法兰3的相对移动,实现一级锁紧固定;
进一步地,通过在锁紧螺母2的侧面设置锁定孔12,锁定孔12中安装螺钉,螺钉卡止在连接底座1上,防止锁紧螺母2松动,即通过螺钉锁定连接底座1和锁紧螺母2,限制锁紧螺母2相对于连接底座1的相对转动,实现二级锁紧固定。
实施例2
本发明的另一个实施例提供一种机器人线路连接装置的连接方法,采用实施例1中的可快速拆装的机器人线路连接装置,具体步骤包括:
步骤S1:将连接底座1和连接法兰3对插,同时电气连接插座6和电气连接插头7插接;
步骤S2:旋转锁紧螺母2,使锁紧螺母2上的内螺纹11与连接底座1上的外螺纹10配合,锁紧螺母2与连接底座1通过螺纹连接;
步骤S3:在锁定孔12中拧入螺钉,完成连接接口的连接。
具体地,步骤S1中,连接底座1和连接法兰3插接时,第一导向柱8插入第一导向孔4中,第二导向柱9插入第二导向孔5中。
由于,第一导向孔4和第二导向孔5非对称设置,如果连接底座1和连接法兰3的插接方向错误,则无法顺利实现对插,能够有效防止误插导致线路损坏的问题。
具体地,步骤S2中,锁紧螺母2旋转锁紧的过程中,连接底座1和连接法兰3插接到位,且电气连接插座6和电气连接插头7插接到位,第一导向柱8完全插入第一导向孔4中,第二导向柱9完全插入第二导向孔5中。
由于,第一导向柱8、第二导向柱9的轴向长度大于电气连接插头7,即第一导向柱8、第二导向柱9凸出于电气连接插头7,使锁紧螺母2完全锁紧后,第一导向孔4(第二导向孔5)能够限制第一导向柱8(第二导向柱9)的继续位移,避免电气连接插头7和电气连接插座6过度插接导致损坏。
具体地,步骤S3中,螺钉拧入锁定孔12后,螺钉12的端部抵在连接底座1的锁紧部的卡止端面上,能够有效防止锁紧螺母2松动,保证锁紧可靠性。
实施时,本发明能够实现接口两端连接件的无工具快速拆卸与安装:
在使用接口进行两端连接件的安装时,先将连接法兰上的两个导向柱分别对准连接底座上的两个导向孔;具体地,连接法兰3上的第一导向柱8对准连接底座上的第一导向孔4,且第二导向柱9对准连接底座上的第二导向孔5插入,再沿轴向推动连接法兰端3,直至与连接底座端的截面贴合,最后手动旋紧连接法兰3上的锁紧螺母2,完成两端连接件的无工具快速安装。
在使用接口进行两端连接件的拆卸时,先手动将连接法兰3上的锁紧螺母2拧松,再沿轴向向外拉出连接法兰端3,如两端连接件不能完全分离,则继续拧松锁紧螺母2,直至两端连接件完全分离,完成两端连接件的无工具快速拆卸。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
- 一种可快速拆装的机器人线路连接装置及其连接方法
- 一种计算机机房自动灭火的线路布局方法及快速连接装置