基于模糊PID控制的天然气调压系统
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及天然气调压控制技术领域,具体涉及基于模糊PID控制的天然气调压系统。
背景技术
目前国内的天然气调压站对压力的调节的主流方式都是使用人工手动调节方式,自动化 集成水平较低。因为该方式现场不需要布线,前期投资较少,所以在城市门站等项目上还继 续使用该模式。但是由于存在诸多弊端,例如控制精度低、反应时间不定、后期的运营成本 较高、控制室不能实时监控等。科学技术的不断发展要求天然气调压站对压力的调节能够达 到科技含量较高的水平,对压力稳定也要求反应时间更加快速、波动范围更小。那么,使用 人工手动调节的工作方式已经脱离了时代的进步,应开发出新的压力调节方式取代目前的方 式。
控制领域经典控制方法之一就是PID控制,PID调节具有容易操作,算法简单、应用的 领域广泛等诸多好处,尽管在科学飞速发展的今天仍占有一席之地。PID调节的设定具有三 个参数Kp、Ki、Kd,其中,Kp代表着PID控制当中的比例调节,Ki代表着PID控制当中的积分调节,Kd代表着PID控制当中的微分调节;PID调节的控制只需要对这三个参数进行设定就可以进行调节控制。PID调节的控制的效果,由这三个参数所决定的。如果想更改PID控制,只需更改这三个参数。如果当管道当中的天然气的压力、流量发生变化时,极大的会影响PID设定的参数,需要及时更新参数来满足稳定运行的要求。所以,单纯的采用常规的PID 控制,基本实现不了所要完成的功能。
而控制领域另一控制方法是模糊控制,模糊控制与常规的控制方式有所不同,模糊控制 的实现不需要知道精细的数学逻辑,并且模糊控制的原理与PID控制比较,此种控制方式具 有反应速度快,响应时间短等特点。模糊控制应用的领域越来越多,在我们周围越来越常见。 控制规则是实现模糊控制首要完成的,控制规则就是人类对所要实现的模糊控制进行一个总 结。但是当被控对象面对非线性、大时滞、干扰严重等控制过程时,控制规则的总结很难实 现。所以,单独使用模糊控制来控制调压系统,仍存在一些弊端,最终效果也不是十分理想。
针对天然气压力的特性,如何能够合理的调节压力是关键问题。如果单独使用PID调节 控制方式,由于不能准确设定参数,导致响应速度慢,难以达到所想要的结果;如果单独使 用模糊控制方式,消除稳态误差是一个难点。
发明内容
为解决上述技术问题,本发明构想一种控制方式,将这两种控制方式结合起来,利用各 自控制方式的优点相结合实现天然气压力调节的可靠性。
为了实现上述目的,本发明采用的技术方案是:
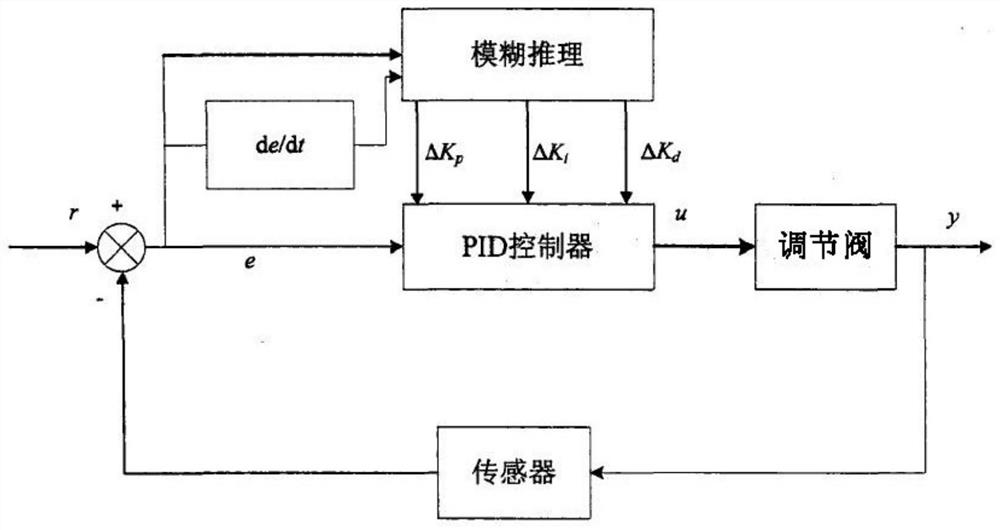
基于模糊PID控制的天然气调压系统,包括天然气调压机构,所述天然气调压机构包括 调节阀与传感器,所述调节阀安装在天然气传输管道上,调节阀阀后端与传感器一端相连接, 还包括模糊PID控制机构,所述模糊PID控制机构对天然气调压机构进行调压控制,模糊PID 控制机构安装在调节阀阀前端;模糊PID控制机构输入信号端与传感器另一端连接。
进一步地,所述模糊PID控制机构包含模糊控制模块与PID控制模块,模糊控制模块利 用PID控制模块的三个参数K
进一步地,在所述模糊PID控制机构中输入力矩气压转换系数W
进一步地,当给定输入信号为4mA时,调节阀的开度为0%,阀后无压力;当给定输入信 号为20mA时,调节阀处于全开状态。
进一步地,所述调节阀包括阀门、阀门定位器,所述阀门定位器与调节型气动执行机构 相连接,还包括电磁阀;所述调节阀给定输入4-20mA信号、输出4-20mA信号、电磁阀信号; 所述阀门定位器接受4-20mA信号,输出0-6bar气压信号给调节阀的调节型气动执行机构。
进一步地,所述调节阀是气动薄膜形式的。
进一步地,所述天然气调压机构中调节阀的阀门形式是截止阀,阀门的尺寸是6寸,压 力等级为300#。
进一步地,所述模糊PID控制机构中输入的力矩气压转换系数W
S1:对天然气调压机构中的调节阀部件进行数学建模;
S2:推算阀门阻尼系数特性;
S3:推算管道压力—流量特性;
S4:得到力矩气压转换系数与比例系数;
S5:对天然气调压机构中的调节阀部件进行仿真验证。
与现有技术相比,本发明的有益效果为:
由于天然气调压站的压力调节是属于比较无规则的调节,将模糊PID控制理念引入进去 之后,使得调压更加迅速并且稳定;模糊PID控制是对PID控制参数的调整,利用各自控制 方式的优势相结合,弥补单纯的模糊控制和PID控制的缺点,并且当系统发生应急情况而改 变了燃料的参数,使得控制系统更加灵活。
附图说明
图1表示本发明结构示意图;
图2表示天然气调压机构中调节阀阻尼系数曲线;
图3表示建立的调节阀的数学模型;
图4表示Simulink环境下建立的调节阀的仿真模型;
图5表示阀门定位器和气动调节阀执行机构的仿真结构;
图6表示压力—流量特性的数学模型;
图7表示输入信号为4mA时,调节阀的输出信号曲线;
图8表示输入信号为12mA时,调节阀的输出信号曲线;
图9表示输入信号为20mA时,调节阀的输出信号曲线;
其中图中:i:模拟量输入信号;w
具体实施方式
如图1所示,本发明所提供的基于模糊PID控制的天然气调压系统,包括天然气调压机 构,所述天然气调压机构包括调节阀与传感器,所述调节阀安装在天然气传输管道上,调节 阀阀后端与传感器一端相连接,所述基于模糊PID控制的天然气调压系统还包括模糊PID控 制机构,所述模糊PID控制机构对天然气调压机构进行调压控制,模糊PID控制机构安装在 调节阀阀前端;模糊PID控制机构输入信号端与传感器另一端连接。
优选地,所述模糊PID控制机构包含模糊控制模块与PID控制模块,模糊控制模块利用 PID控制模块的三个参数K
优选地,在所述模糊PID控制机构中输入力矩气压转换系数W
优选地,所述调节阀包括阀门、阀门定位器,所述阀门定位器与调节型气动执行机构相 连接,还包括电磁阀;所述调节阀给定输入4-20mA信号、输出4-20mA信号、电磁阀信号; 所述阀门定位器接受4-20mA信号,输出0-6bar气压信号给调节阀的调节型气动执行机构。
天然气调压站的压力调节是由管道上的调节阀所完成的,所述调节阀采用气动薄膜形式 的。在实际运行之前要针对所述调压阀的阀门的性能集合模糊PID控制的方式,进行大量的 实验、建立数学模型。
一、对天然气调压机构进行数学建模
1、对调节阀部件进行数学建模,所述调节阀主要包括阀门、气动调节阀执行机构、阀门 定位器部件。
(1)阀门定位器
阀门定位器是调节阀的核心部件,它接受4-20mA电流信号,输出0-6bar气压信号给调 节阀的气动调节阀执行机构部分,这样可以保证调节阀开度的精确性。
所述调节阀主要给定的信号是三个,分别是输入4-20mA信号、输出4-20mA信号、电磁 阀信号。通常情况下,首先,电磁阀通电后,使仪表与空气接通,保证调节阀能正常工作,这个是驱动调节阀的首要关键点。其次,在调节阀上面安装一个阀门定位器,它会接受和反馈4-20mA信号,通过阀门定位器来控制调节阀的动作及可以显示调节阀的阀位。当输入的电 流增大时,调节阀的阀杆向上运动,开度增大,反馈杆向相反运动。反之,输入电流减小。
(2)气动调节阀执行机构
气动调节阀驱动部分主要分为传动部件、电—气转换部件和驱动部件。
①气压转换单元
根据执行机构的结构,流量的平衡公式如下:
其中,Q
由于压缩空气的压力相对比较恒定,所以气体的压差跟流量可以认定为线性关系,公式如 下:
其中,Q
由于调节阀内部的皮膜是封闭结构,所以可以认定为内部的流量为零。得出公式如下:
其中,T
通过执行机构的动作时间公式,得到传递函数为:
其中,G
上面所列公式为理想情况的,但是在实际工况,还会出现一些特殊情况,比如仪表管表 面会有一些粗糙度、压力不足等情况,所以将上述公式进行化解为:
其中,T
②能力的转换
将仪表管当中的气体压力转换为推力的过程,公式如下:
F=MP (6)
其中:F为推力,M为皮膜的有效面积,理论情况下为线性关系。但实际操作工程中,可 能会因为受力原因发生形变而发生变化。
③行程转换
当考虑弹簧的弹性为恒定的因素的前提下,位移与推力之间的关系可以近似为线性关系, 公式如下:
F=TL (7)
其中,F为推力;T是弹簧的系数;L是阀杆位移的距离。
分析气动调节阀执行机构的各个组成部件分析可知,可以得出执行机构的传递函数,如 下:
其中,G
2.阀门阻尼系数特性
根据公式进行推算,调节阀的流通量C
其中,C
阀门的开度与阀门的阻尼系数成反比例关系,当阀门开发越大时,阀门的阻尼系数越小。 根据上述所提到的数据在MATLAB进行仿真,定义开度为x轴,阻尼系数的倒是为y轴,所呈 现的曲线图如图2所示,根据曲线得出的公式如下:
y=-38.8366X5+114.832X4-88.6X3+26.7203X2-2.6312X+0.01 (10)
3.管道压力—流量特性
设定P
C是调压阀的容量参数,公式如下:
根据气体流量动态平衡方程、阻尼系数和容量系数的定义,由此所得动态平衡公式如下:
其中,C是调压阀的容量参数;Q是天然气的体积流量;P1是调节阀前的压力;P2 是调节阀后压力。
根据上述公式13可知,天然气的体积流量取决于调节阀前的压力和调节阀后压力之间的 差值。
天然气经过调压站的调压单元时,首次经过调节阀时,阀前压力会发生波动,是由于流 通能力发生突变导致。但是经过短时间过后,阀前压力会慢慢趋于稳定。
根据上述对阀门定位器、气动调节阀执行机构及管道流通能力的分析,建立对调节阀的 数学模型,如图3所示。
二、对天然气调压机构进行建模验证
建立数学模型之后,是需要通过仿真对数学模型的正确性进行验证的。仿真模型的建立 是在Simulink环境下完成的,总体结构如图4所示。
1.阀门定位器和气动调节阀执行机构仿真模型
阀门定位器和气动调节阀执行机构的仿真是在Subsystem里实现的,通过上述数学建模 分析得出相应参数如下:力矩气压转换系数W
本次设计方案,要求调节阀全关为4mA,阀门全开为20mA。由于建立的数学模型想线性 关系,在模型当中全关状态指的是0mA,而调节阀的全关状态是4mA,这样就存在一些偏差, 为了消除此误差,对此曲线进行一些修正。
2.调压阀阻尼系数仿真模型
Fcn1是由公式(2.12)得到的函数关系,形式如下:
Fcn1:-49.6966*(u[1]^5+115.8832*(u[1]^4-88.6000*(u[1]^3+26.7203*(u[1]^2-2.6312*(u[1])+0.0155
(14)
其中,u是给定量,Fcn1是得到的开度。
验证饱和度就是为了验证模型承受能力,显示屏上显示下限不能为0。通过仿真实验得 到结论,实际的下限为大于0,上限为显示屏上的八位的最大值。
3.压力—流量仿真模型
压力—流量仿真是建立在一个模块当中,如图6所示。
其中,Fcn2是根据公式6得到的函数,形式如:
其中,u是被控对象,Fcn2是流量仿真结果。
得到的结论为:如图7所示,当输入信号为4mA时,调节阀的开度为0%,阀后无压力。 如图8所示,当输入信号为12mA时,调节阀的开度为50%,这个时候阀门处于稳定状态。当 入口的压力出现波动的时候,为了保证阀后压力稳定,调节阀的开度也会随之发生变化。 如图9所示,当输入信号为20mA时,调节阀处于全开状态,这时调节阀的前后压力是一样的, 不会出现任何的降压效果。
本发明的实际工作中,首先在模糊PID控制器中输入力矩气压转换系数W
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在 不脱离本发明的原理和精神的情况下可以对实施例进行多种变化、修改、替换和变型,本发 明的范围由所附权利要求及其等同物限定。
- 基于模糊PID控制的天然气调压系统
- 基于回收来流压力能的超低温环境取热天然气调温调压系统