一种行株间距可调的除草系统及方法
文献发布时间:2023-06-19 12:07:15
技术领域
本发明属于农业自动化领域,涉及一种行株间距可调的除草系统。
背景技术
由于农耕精细化管理的本质,因此农业一直很难引入传统的工业机器人替代。现在主要农耕机器人应用的主要领域分为:喷药和除草、收获、环境控制三大类。NaioTechnologies技术公司是一家法国机器人公司,它利用激光和摄像头自动导航,在水果和蔬菜作物间穿行。它可以识别不同的作物类别,自动进行除草作业。机器人Oz具有4个电动引擎,一次充电能满足三小时工作。在自动模式下,Oz可以沿着地块的作物行方向移动,无需人工监督全自动除草。这种除草机的形式是利用机器视觉进行目标定位以实现除草。
除草自动化机主要还是停留在行间距的自动化除草,对于株间距方面的除草还是比较少,国外初创公司开展一些松土方式的除草方式,并在株间行走图案,如此对除草机的速度有严格的限制。另外不同的株距会影响除草效率,针对株行间距可调的除草机现阶段是没有的。
现有技术中,没有株行间距可调的除草系统。
发明内容
本发明解决的技术问题是:现阶段关于田间除草自动化设备中,基本是开展一些松土方式的除草方式,并在株间行走图案,如此对除草机的速度有严格的限制。另外不同的株距会影响除草机效率,本发明是解决适应不同行株间距的除草问题,根据行间距可以横向电动位移改变横向位移杆的长度,使得松土钉耙充分达到株间。通过作用链条切换件使得传动链条与盘式此轮组的连接改变,根据不同的株间距选取盘式齿轮。本发明可以对不同株行间距可以在不改变车速的情况下,实现精确的松土除草能力。实现方面简单可靠,可以有效对株间杂草松土处理。
本发明通过以下技术方案予以实现:动力传动链条,铰链切换件,盘式齿轮组,曲连杆,横向位移杆,横向固定托和松土钉耙。
所述动力传动链条是把动力设备中的动力电机与盘式齿轮组连接起来,达到动力传送到盘式齿轮组。
所述铰链切换件是切换动力传动链条与盘式齿轮组中齿轮的切换。
所述盘式齿轮组是由多个齿轮串接在一个中心轴,在齿轮轴上安装法兰盘。
所述曲连杆一端连接在盘式齿轮组上法兰盘,另外一端是和横向位移杆连接,当齿轮带动法兰盘转动,转动行程就转成曲连杆连接的横向位移杆的横向位移行程。
所述横向位移杆一端连接在曲连杆,自身安装在横向固定托中,另外一端是和松土钉耙连接。横向位移杆根据行间距可以调节长度。
所述松土钉耙一端是多齿钉耙,以增加松土面积。随着动力平台的速度前进,就会实现松土钉耙在农作物株间摆动。
本发明与现有技术相比具有如下有益效果:
(1)本发明利用多齿轮传动调节,可以解决不同株间距的松土杂草处理问题。
(2)本发明利用横向位移伸缩调节,可以解决不同行距的杂草松土处理问题。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
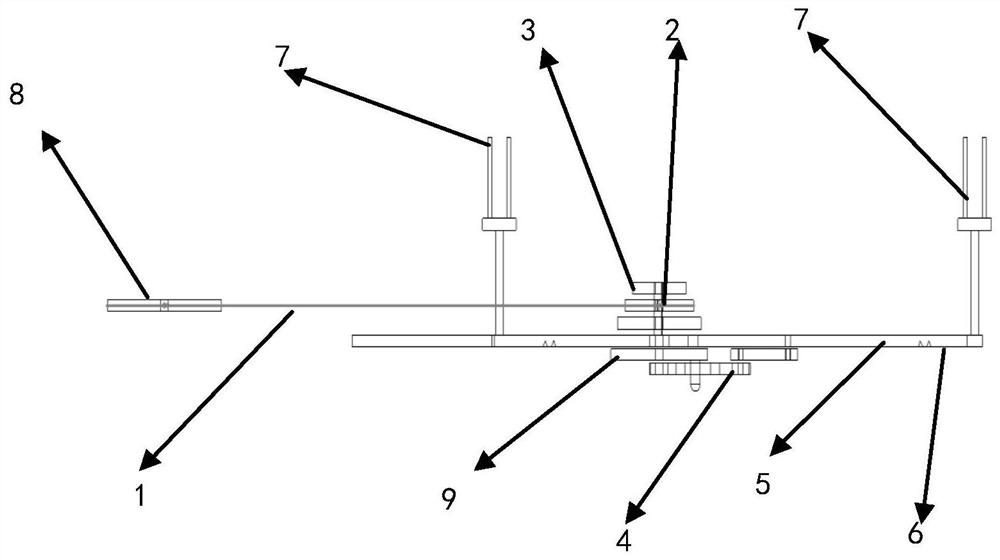
图1是本发明实施例提供的行株距可调的除草系统图;
图2是本发明实施例提供的行株距可调的除草侧视结构图;
图3是本发明系统的示意图。
附图中,图3是摘要附图。
具体实施方式
下面将结合附图对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本发明的保护范围。
需要注意的是,除非另有说明,本申请使用的技术术语或者科学术语应当为本发明所属领域技术人员所理解的通常意义。
如图1所示本发明实施例提供的行株距可调的除草系统图,该适用于不同行株距的除草系统,其特征在于包括:动力传动链条,铰链切换件,盘式齿轮组,曲连杆,横向位移杆,横向固定托和松土钉耙。其中,动力传动链条是把动力设备中的动力电机与盘式齿轮组连接起来,达到动力传送到盘式齿轮组。铰链切换件是切换动力传动链条与盘式齿轮组中齿轮的切换。盘式齿轮组是由多个齿轮串接在一个中心轴,在齿轮轴上安装法兰盘。曲连杆一端连接在盘式齿轮组上法兰盘,另外一端是和横向位移杆连接,当齿轮带动法兰盘转动,转动行程就转成曲连杆连接的横向位移杆的横向位移行程。横向位移杆一端连接在曲连杆,自身安装在横向固定托中,另外一端是和松土钉耙连接。横向位移杆根据行间距可以调节长度。松土钉耙一端是多齿钉耙,以增加松土面积。随着动力平台的速度前景就会实现松土钉耙在农作物株间摆动。
本实施例本发明提供了一种行株间距可调的除草系统,针对现阶段关于田间除草自动化设备中,基本是开展一些松土方式的除草方式,并在株间行走图案,如此对除草机的速度有严格的限制。另外不同的株距会影响除草机效率问题。本发明利用多齿轮传动调节可以解决不同株间距的杂草处理问题。利用横向位移伸缩调节,可以解决不同行距的杂草松土处理问题。具体实施步骤如下:
动力牵引平台开始启动,设置动力牵引平台速度为v1,设置动力牵引速度和动力传动链条1的速度比是1:1,动力传动链条1的速度为v1。根据行间距M,设置曲连杆总长度小于等于M/2。根据株间距N,通过铰链切换件2驱动动力传动链条到盘式齿轮组3中其中一个齿轮上,齿轮上的周长不大于2N,近乎等于2N。
如图1所示,动力平台移动后,动力传动链条开始工作,牵引盘式齿轮3转动,重复转动的过程中,其上的法兰盘31牵引曲连杆4往复运动。
紧接着,横向位移杆5在横向位移托6内也做伸缩运动,横向位移杆5是双边性,左边缩右边就伸,反之左边伸右边就缩。如图2所示,通过调节法兰盘9的位置使得横向位移杆伸缩最远处在株间距中间,调节方式采用共轴卡槽32调节法兰盘9,横向卡槽33调节横向位移杆5的长度。
多齿钉耙6是由双齿组成,法兰盘的直径是D,那双齿耙的宽度小于D。多齿钉耙6随着牵引平台在株间做蛇形往复运动。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
- 一种行株间距可调的除草系统及方法
- 一种应用于蔬菜株行沟间的多功能除草机