广角3D结构光装置
文献发布时间:2023-06-19 12:10:19
技术领域
本发明一般涉及3D技术领域,具体涉及一种广角3D结构光装置。
背景技术
随着移动设备和智能交互设备的普及,2D(Dimension;维)因其只能提供XY两个方向的位置信息,已经不能满足行业发展需要。而3D技术不但可以提供XY两个方向的位置信息还可以提供位置深度信息,可以减少2D识别时发生的误判,所以3D技术目前已经被广泛应用在扫地机器人、刷脸支付行业、智能门锁、体感游戏、安防监控、智能机器人避障等。
目前行业中3D技术主要有双目、TOF、结构光等,而结构光3D技术因其精度高、成本低、功耗低等优点而被广泛应用。
随着时代的发展,为了得到更精确的深度效果,一些工业应用行业也开始使用3D技术,如投影仪、高精密焊接等,而传统的结构光模组主要由一个激光发射模组和一个红外接收模组组成,而因其视场角小、光斑密度低等原因,并不能广泛的应用于一些特殊的工业行业。
发明内容
鉴于现有技术中的上述缺陷或不足,期望提供一种广角3D结构光装置,用以解决现有结构光模组视场角小、光斑密度低等原因,并不能广泛的应用于一些特殊的工业行业的问题。
本发明提供一种广角3D结构光装置,包括:
广角相机;
至少两个激光发射单元,用于发射散斑激光束;
所述广角相机及所述激光发射单元并排设置,且所述广角相机的两侧均设置有所述激光发射单元;
各所述激光发射单元的轴线向远离所述广角相机轴线的方向倾斜,且各所述激光发射单元的部分视场角重合;以及,
在大于广角相机预定距离外,所述各所述激光发射单元视场角范围之和覆盖所述广角相机的视场角。
作为可实现方式,在视场角重合的范围内,不同所述激光发射单元所发射的光斑不重合。
作为可实现方式,包括两个所述激光发射单元,两个所述激光发射单元分置于所述广角相机两侧,且两个所述激光发射单元分及所述广角相机位于同一直线上。
作为可实现方式,各所述激光发射单元的轴线向远离所述广角相机轴线的方向倾斜的角度相等。
作为可实现方式,各所述激光发射单元激光出射面的中点与所述广角相机的激光入射面位于同一平面。
作为可实现方式,所述预定距离满足以下关系式:
其中,D为所述预定距离,BL为所述激光出射面的中心与所述激光入射面的中心之间距离,θ
作为可实现方式,所述激光发射单元为垂直腔面发射激光器。
本申请提供的上述方案,由于具有两个以上轴线向远离广角相机轴线的方向倾斜的激光发射单元,并且多个激光发射单元视场角范围之和覆盖所述广角相机的视场角,使得该广角3D结构光装置具有较大的视场角;此外,由于多个激光发射单元的部分视场角重合,那么在重合的位置处提高了光斑密度。
附图说明
通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本申请的其它特征、目的和优点将会变得更明显:
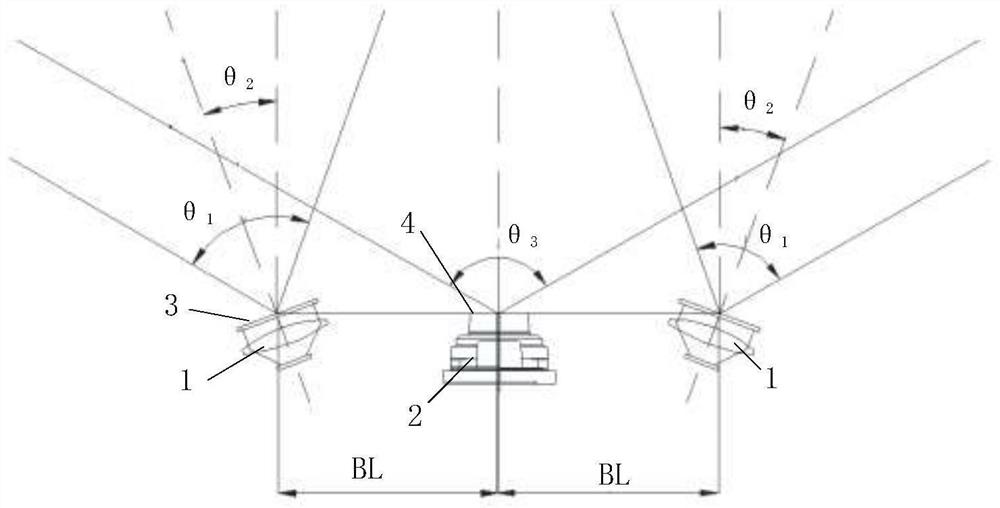
图1为本发明实施例提供的广角3D结构光装置的结构示意图;
图2为两个激光发射单元部分视场重合的光斑图。
具体实施方式
下面结合附图和实施例对本申请作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与发明相关的部分。
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本申请。
如图1所示,本发明实施例提供的广角3D结构光装置,包括:
广角相机2;
至少两个激光发射单元1,用于发射散斑激光束;例如但不限于,该处的散斑激光束可以是波长为850nm、940nm的红外/近红外激光。
所述广角相机2及所述激光发射单元1并排设置,且所述广角相机2的两侧均设置有所述激光发射单元1;
各所述激光发射单元1的轴线向远离所述广角相机2轴线的方向倾斜,也即激光发射单元1向背离广角相机2的方向倾斜,以增大多个激光发射器所形成的总的视场角,且各所述激光发射单元1的部分视场角重合,使得广角相机2的视场角范围内均可采集到深度信息,同时,提高视场角范围内的光斑数量,以利于提高光斑密度;以及,
在大于广角相机2预定距离外,也即在广角相机2镜头外预定距离,所述各所述激光发射单元1视场角范围之和覆盖所述广角相机2的视场角θ
例如,在激光出射面3的中心与激光入射面4的中心之间距离BL为25cm,激光发射单元1视场角为80°,广角相机2视场角为120°,激光发射单元1的轴线向远离所述广角相机2轴线的方向倾斜的角度为20°时,所述预定距离为70cm,此时,多个激光发射单元1共同构成的视场能覆盖广角相机2的视场,在大于70cm的范围外的广角相机2的视场范围中均可采集到深度信息。
在激光出射面3的中心与激光入射面4的中心之间距离BL为10cm,激光发射单元1视场角为80°,广角相机2视场角为120°,激光发射单元1的轴线向远离所述广角相机2轴线的方向倾斜的角度为20°时,所述预定距离为28cm,此时,多个激光发射单元1共同构成的视场能覆盖广角相机2的视场,在大于28cm的范围外的广角相机2的视场范围中均可采集到深度信息。
本申请提供的上述方案,由于具有两个以上轴线向远离广角相机2轴线的方向倾斜的激光发射单元1,并且多个激光发射单元1视场角范围之和覆盖所述广角相机2的视场角,使得该广角3D结构光装置具有较大的视场角;此外,由于多个激光发射单元1的部分视场角重合,那么在重合的位置处提高了光斑密度。
作为可实现方式,为了进一步提供光斑密度,在视场角重合的范围内,不同所述激光发射单元1所发射的光斑不重合。
如图2所示,示出了两个激光发射单元1部分视场重合的光斑图,其中,两个激光发射单元1分别发出散斑激光束,在其各自的视场范围内形成各自的光斑图案5、6,在中部的位置是视场角重合的范围C,在该范围C内,由于不同激光发射单元1发射的发射散斑激光束的光斑不重合,因此,该范围C内的光斑密度是其它位置的两倍,通过光斑密度的增加,可以提高深度测量的精度及准确性。
作为可实现方式,包括两个所述激光发射单元1,两个所述激光发射单元1分置于所述广角相机2两侧,且两个所述激光发射单元1分及所述广角相机2位于同一直线上。当然,在其他示例中,还可以设置其它数量的激光发射单元1,如三个、四个等,设置超过两个激光发射单元1时,多个激光发射单元1可以沿着广角相机2的周向均匀排布。
作为可实现方式,为了便于降低后续深度信息的计算量,各所述激光发射单元1的轴线向远离所述广角相机2轴线的方向倾斜的角度θ
作为可实现方式,各所述激光发射单元1激光出射面3的中点与所述广角相机2的激光入射面4位于同一平面。
作为可实现方式,所述预定距离满足以下关系式:
其中,D为所述预定距离,BL为所述激光出射面3的中心与所述激光入射面4的中心之间距离,θ
作为可实现方式,所述激光发射单元1为垂直腔面发射激光器(Vertical CavitySurface Emitting Laser;VCSEL)。
需要理解的是,上文如有涉及术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
以上描述仅为本申请的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本申请中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本申请中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
- 广角3D结构光装置
- 3D结构光激光发射器及3D结构光装置