空间双星高精度跟踪指向演练装置与方法
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及一种空间双星高精度跟踪指向演练装置与方法,属于飞行器地面仿真领域。
背景技术
空间双星的跟踪指向仿真是当下的一个研究热点。当前国内已有的方法主要集中在数字仿真和半实物仿真领域,能够在地面对空间双星跟踪指向演练验证的装置仍然较少。空间飞行器远离地面工作环境特殊,无法在地面进行实机验证。该方法为在地面上再现空间双星跟踪指向流程提供了理论依据,进而可以通过满足给定位置和速度需求的地面转动平台的轨迹规划和跟踪控制来实现空间双星跟踪指向的地面模拟,从而降低航天器空间运动模拟的成本,缩短开发周期。因此本装置方法的提出具有重要意义。
杨彬等在《基于FLAMES的卫星对抗仿真实验系统》(舰船电子对抗,2017年2月,49卷,第1期,页码50-54)中针对卫星对抗作战行动效果难以检验的问题,提出了基于FLAMES的卫星对抗仿真实验系统,介绍了FLAMES仿真平台基本理论,搭建了卫星对抗仿真实验系统,对各分系统接口进行了设计。以《基于FLAMES的卫星对抗仿真实验系统》为代表的卫星对抗仿真装置,使用国产FLAMES软件进行对抗仿真。数字仿真难以精确复现现实空间中的工作环境,仿真精度依赖于软件的设计与调试,低于全物理仿真方法。
中国专利号CN202010826219.2名称为“一种半物理卫星仿真系统及仿真方法”的实用新型公开了一种装置和方法,主要用来解决现有技术中设计出的卫星仿真系统的适用性较差的问题,在该申请实施例所提供的方案中,在卫星仿真计算机与卫星单机之间设置1553B接口仿真模块和通用的1553仿真设备,不仅能够便捷地完成卫星仿真模块中的至少一个卫星单机软件仿真模块与卫星单机(在1553B接口仿真模块和1553仿真设备配合下工作)之间的相互替换;还能够在仿真系统接入不同卫星单机时,一般只需要修改配置文件,不需修改半物理仿真系统中的软、硬件,避免了仿真系统的配置不灵活,系统的开放性不足,进而提高了仿真系统的适用性。专利号CN202010826219.2中的方法虽然提高了仿真系统的适用性,可以更换载荷以实现不同的任务需求,但是半物理仿真方法依然存在精度低于全物理仿真方法的问题。同时,该方法不能实现空间双星高精度跟踪指向演练的仿真。
发明内容
本发明的目的是为了解决上述现有技术存在的问题,进而提供一种空间双星高精度跟踪指向演练装置与方法。
本发明的目的是通过以下技术方案实现的:
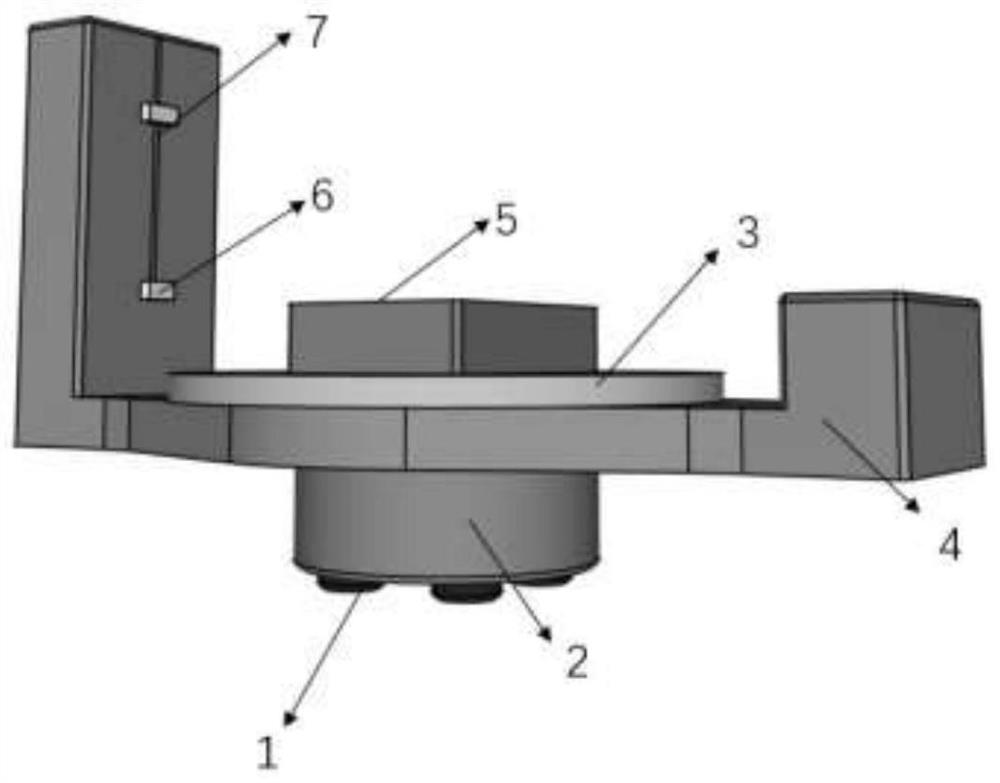
一种空间双星高精度跟踪指向演练装置,包括底座、结构支撑装置、单轴微重力模拟装置、高精度大回转机构、伴随星模拟装置、指向评估装置和目标星模拟装置,伴随星模拟装置安装固定在单轴微重力模拟装置上,单轴微重力模拟装置和结构支撑装置之间靠轴承相连接,高精度大回转机构套在轴承上,单轴微重力模拟装置和结构支撑装置之间设置有气膜,底座安装在结构支撑装置下,高精度大回转机构安装在结构支撑装置上,并与单轴微重力模拟装置的中心轴线重合,高精度大回转机构的一侧为配重块,另一侧为立柱,立柱上装有丝杠,目标星模拟装置安装在丝杠上,可上下滑动,用来模拟参考星目标星的位置,指向评估装置固连在立柱底端,用来接受跟踪指向信号。
本发明一种空间双星高精度跟踪指向演练方法,所述空间双星高精度跟踪指向演练方法具体步骤为:
步骤一:打开气阀,空气流过单轴微重力模拟装置下预留的孔,使单轴微重力模拟装置与结构支撑装置之间形成气膜,单轴微重力模拟装置载着伴随星模拟装置处于自由悬浮状态;
步骤二:单轴微重力模拟装置通过与单轴微重力模拟装置相连的调平上位机进行调平,操作调平上位机将单轴微重力模拟装置调水平;
步骤三:伴随星模拟装置和高精度大回转机构上电启动;
步骤四:轨道参数上位机导入双星轨道参数文件,双星轨道参数文件包括双星的质量、双星位置、双星除去地球引力以外的其他作用力合力的加速度、动坐标系旋转的角加速度和角速度,配置双星相对位置参数,跟踪指向参数;
步骤五:轨道参数上位机解算双星轨道参数文件,根据解算出的运动数据产生离线或在线的运动指令,将输入的双星轨道参数转化为高精度大回转机构和目标星模拟装置(7)的控制指令;
步骤六:高精度大回转机构依照控制指令绕单轴微重力模拟装置的中心轴线旋转,目标星模拟装置依据控制指令在立柱上滑动;
步骤七:待目标星模拟装置运动到设定位置后,另一台牵引上位机依据牵引指向参数文件解算出的指向评估运动控制指令对指向评估装置进行牵引,从而保证其与伴随星模拟装置的相对位置关系;同时,牵引上位机依据指向评估装置的姿态解算出伴随星控制指令,伴随星模拟装置依据该伴随星控制指令调整其上的红外信号发射装置的方向,并发出跟踪指向信号,使跟踪指向信号被目标性模拟装置接收;
步骤八:指向评估装置上装有CCD,接收来自伴随星模拟装置的跟踪指向信号,从而确定跟踪、指向以及姿态调整的准确性;
步骤九:当伴随星模拟装置发出跟踪指向信号后,另一台评估上位机发出评估信号,通过与评估上位机相连并安装在各模拟值装置上的传感器采集当前时刻的状态信息包括单轴微重力模拟装置当前的姿态和速度、目标星模拟装置的位置和速度以及伴随星模拟装置的指向信息;评估上位机根据这些数据,通过层次分析法(AHP)确定效能;在完成一次评估之后,评估上位机显示相关结果,包括单轴微重力模拟装置当前的姿态和速度、目标星模拟装置的位置和速度以及伴随星模拟装置的指向信息以及指向效能的评估结果等,以便完成后续的专业评估,可进行数据和图形显示。
本发明提供了一种能够实现空间双星高精度跟踪指向演练的仿真装置和方法,该装置和方法基于全物理仿真平台,可以在地面模拟航天器的空间运动,具有卫星工况配置灵活,精度高,结构简单的特点。
附图说明
图1为本发明空间双星高精度跟踪指向演练装置的装置结构图。
图2为本发明空间双星高精度跟踪指向演练装置与方法的坐标示意图。
具体实施方式
下面将结合附图对本发明做进一步的详细说明:本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式,但本发明的保护范围不限于下述实施例。
实施例一:如图1所示,本实施例所涉及的一种空间双星高精度跟踪指向演练装置,在实际工作时,伴随星模拟装置安装于单轴微重力模拟装置上,单轴微重力模拟装置和结构支撑装置之间有气膜,以模拟空间的微重力环境。高精度大回转机构绕单轴微重力模拟装置的中心轴线做回转运动,目标星模拟装置在丝杠上滑动,同时随高精度大回转机构一起转动。这样双星间的相对运动被分解为二维转动(xy平面)和一维平动(z方向),该装置方法实现双星的相对运动的仿真。
实施例二:如图1和2所示,本实施例所涉及的一种空间双星高精度跟踪指向演练方法,双星的相对运动模拟的分析过程为:
有轨道坐标系s-xyz与地心惯性坐标系O
目标星s,伴随星c,目标星s在近圆轨道上逆时针运动,取目标星s的轨道坐标系s-xyz作为相对运动坐标系,其原点与目标星的质心固连并随其沿轨道运动,x轴与目标星s的地心矢量r
1.相对运动方程的建立
设轨道半径为a,则目标星位置矢量r
在地心惯性坐标系中,目标星和伴随星的动力学方程如下
其中f
由(1)~(2)可得到伴随星与目标星的绝对加速度之差
上式可以进一步表示为下列等效关系式
Δf表示为f
建立伴随星与目标星在动坐标系s-xyz中的相对运动方程,如下
上式中的
上式中的
将式(5)和式(7)~(9)代入式(6)可得
对于伴随星和目标星的近距离(大约几米至几十千米)的相对运动情况,可以进一步简化上式
2.相对运动方程的求解:
对式(11)中的第二式进行积分可得
将式(12)代入式(11)中的第一式,积分后得到
将式(13)代入式(12),积分后可得
对(11)的第三式进行积分可得
当式(11)右侧的力为0时,则该方程变为齐次微分方程。对该方程进行一次、二次积分,得到自由运动的解为
根据上式可知,伴随星和目标星的相对运动可以分解为轨道平面(xy平面)内和垂直于轨道平面(z方向)两个相互独立的运动。
对应于该装置,单轴微重力模拟装置及伴随星模拟装置一起就模拟了位于空间微重力环境的伴随星。伴随星模拟装置的质心位于单轴微重力模拟装置的中心轴线,高精度大回转机构绕单轴微重力模拟装置的中心轴线旋转,其相对运动轨迹在轨道平面(xy平面)内的分解为近圆轨道,也就实现了伴随星和目标星的相对运动在轨道平面内的分解。同时,目标星模拟装置在立柱上做上下运动,其相对运动轨迹在垂直于轨道平面的方向上的分解为自由震荡,就实现了伴随星和目标星的相对运动在垂直于轨道平面方向(z方向)的分解。
在目标星模拟装置到达预定位置后,伴随星模拟装置将调整自身姿态并发出跟踪指向信号,比如红色激光信号。立柱底端的评估装置上装有CCD感光装置,用以接收伴随星模拟装置的红色激光跟踪指向信号。指向评估装置在接收到跟踪指向信号后,上位机将对跟踪指向效果进行评估,并将评估结果显示在上位机的用户界面。
以上所述,仅为本发明较佳的具体实施方式,这些具体实施方式都是基于本发明整体构思下的不同实现方式,而且本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书的保护范围为准。