一种高空玻璃幕墙清洗机构及清洗装置
文献发布时间:2023-06-19 13:51:08
技术领域
本发明涉及玻璃幕墙清洗技术领域,具体涉及一种高空玻璃幕墙清洗机构及清洗装置。
背景技术
这里的陈述仅提供与本发明相关的背景技术,而不必然地构成现有技术。
这里的陈述仅提供与本发明相关的背景技术,而不必然地构成现有技术。
现代都市高层建筑越来越多。玻璃幕墙因呈现出不同的色调,有着随阳光、月色、灯光的变化给人以动态的美等优点而广泛应用于高层建筑。但是,玻璃幕墙极易蒙尘纳垢,因此,需要定期进行清洗。
发明人发现,基于牢固固定的需要,玻璃幕墙需要安装固定玻璃块的框架,因而,上下玻璃块以及左右玻璃块之间存在高度不一、宽度不一的框架隔断。然而,对于目前一般的玻璃清洗装置而言,该框架隔断则变为逾越的障碍,同时,紧临框架隔断的玻璃条状区域,则成为目前一般清洗装置较难清洗的清洁盲区。目前,现有的玻璃幕墙清洗设备在自动纵向以及横向跨越框架隔断的同时不能兼顾高清洁度地清洁紧邻框架隔断的清洁盲区,表现为自动化程度低,清洁效果不理想。
发明内容
本发明的目的是为克服上述现有技术的不足,提供一种高空玻璃幕墙清洗机构,能够越过幕墙之间的连接框架,同时对玻璃幕墙进行无盲区清洗,自动化程度高。
为实现上述目的,本发明采用如下技术方案:
第一方面,本发明的实施例提供了一种高空玻璃幕墙清洗机构,包括架体,架体设有第一直线驱动机构,第一直线驱动机构与移动件连接以带动移动件沿第一方向运动,移动件固定有清洗机构,清洗机构与设置在移动件的供水机构连接,清洗机构包括支座,支座与移动件连接并固定有第二直线驱动机构,第二直线驱动机构与清洗组件连接,能够带动清洗组件沿与第一方向垂直的第二方向往复运动,移动件的两侧还设置有风机以产生平行于第一方向的风力荷载。
可选的,所述支座采用一侧敞口设置的盒体结构,支座的敞口端端面边缘处设置密封胶条,所述清洗组件包括安装板,安装板设置有喷嘴,喷嘴与供水机构连接,安装板与第二直线驱动机构连接,安装板设置有多个清洁胶条。
可选的,所述支座内部设有导向轴,导向轴与连接架滑动连接,连接架与安装板固定,连接架与第二直线驱动机构连接。
可选的,所述支座的底部设有污水口,污水口通过管路与安装在架体的污水箱连通。
可选的,所述支座的顶面、底面及侧面均安装有激光测距仪。
可选的,所述第一直线驱动机构包括固定在架体的第一驱动件,第一驱动件与齿轮连接,齿轮与齿条相啮合,齿条与移动件固定,移动件还设有滑块,滑块与固定在架体的第一导向轴滑动连接。
可选的,所述第二直线驱动机构包括固定在支座的第二驱动件,第二驱动件与转轮连接,转轮的偏心位置处与第一连接件的一端铰接,第一连接件的另一端与第二连接件的一端铰接,第二连接件的另一端与清洗组件连接。
可选的,所述移动件安装有连接座,连接座通过扭簧与连接块转动连接,连接块与支座固定连接。
第二方面,本发明的实施例提供了一种高空玻璃幕墙清洗装置,包括第一方面所述的高空玻璃幕墙清洗机构,所述高空玻璃幕墙清洗机构通过吊装线与升降横移机构连接,升降横移机构与用于设置在建筑物顶面的吊装架连接。
可选的,所述升降横移机构包括机架,机架连接有能够做主动转动的转轴,转轴固定有第一绕线辊和第二绕线辊,第一绕线辊缠绕有吊装线,吊装线顶端缠绕固定在第一绕线辊上,吊装线底端与架体固定连接,第二绕线辊缠绕有供电线,机架安装有行走机构,行走机构与吊装架连接,能够带动机架沿吊装架行走。
上述本发明的有益效果如下:
1.本发明的高空玻璃幕墙清洗机构,清洗机构与第一直线驱动机构连接,第一直线驱动机构能够带动清洗机构沿第一方向运动,从而脱离被清洗的玻璃幕墙,方便整个清洗装置能够在工作时能够越过幕墙之间的连接的框架,实现整个玻璃幕墙的清洁。
2.本发明的高空玻璃幕墙清洗机构,支座安装有激光测距仪,能够检测到幕墙之间的框架,从而实现了利用第一直线驱动机构自动越过框架,自动化程度高。
3.本发明的高空玻璃幕墙清洗机构,具有风机和压力检测元件,能够利用压力检测元件反馈的压力判断清洗机构是否贴住玻璃幕墙,在风机的风力作用下,能够使得清洗机构紧密贴合玻璃幕墙,利用风机为清洗机构和玻璃幕墙提供持续压力,解决了因贴合力不足而导致清洁度下降的问题。
4.本发明的高空玻璃幕墙清洗机构,清洗组件与第二直线驱动机构连接,第二直线驱动机构能够带动清洗组件沿第二方向做往复运动,单位时间内可对玻璃幕墙进行多次清洗,大幅提高了清洁的质量。
5.本发明的高空玻璃幕墙清洗机构,采用与密封胶条垂直的清洗胶条对玻璃幕墙进行清洗,增大了清洁的有效面积,同时可以解决其他清洁机构清洗时存在清洁盲区的问题。而清洗胶条属于柔软的橡胶材料,对玻璃幕墙的损害很小。
6.本发明的高空玻璃幕墙清洗机构,支座为盒体结构,且支座的敞口端端面边缘处设置密封胶条,密封胶条与玻璃幕墙贴合后能够形成一个封闭腔体,使得清洗时产生的污水不会流出,而且能够通过污水口回收至污水箱,避免了再次污染玻璃幕墙,保证了清洗效果。
附图说明
构成本申请的一部分的说明书附图用来提供对本申请的进一步理解,本申请的示意性实施例及其说明用于解释本申请,并不构成对本申请的限定。
图1是本发明实施例1清洗机构整体结构示意图;
图2是本发明实施例1拆除清洗机构后整体结构示意图一;
图3是本发明实施例1拆除清洗机构后整体结构示意图二;
图4是本发明实施例1清洗机构结构示意图一;
图5是本发明实施例1清洗机构结构示意图二;
图6是本发明实施例1第二直线驱动机构结构示意图;
图7是本发明实施例1安装板与第二导向轴装配示意图;
图8是本发明实施例1清洗胶条安装示意图;
图9是本发明实施例2升降横移机构整体结构示意图;
图10是本发明实施2第一夹线机构结构示意图;
图11是本发明实施例2行走机构结构示意图;
图12是本发明实施例2行走机构与工字钢配合示意图;
图13是本发明实施例2供电线伸缩检测机构结构示意图;
其中,1.第一支撑梁,2.第二支撑梁,3.支撑板,4.风机,5.风机安装板,6.支撑柱,7.第一电机,8.齿轮,9.齿条,10.第一导向轴,11.滑块,12.轴座,13.限位开关,14.连接座,15.连接块,16.支座,17.压力霍尔传感器,18.移动板,19.密封胶条,20.安装板,21.第二电机,22.电机座,23.转轮,24.第一连接件,25.第二连接件,26.喷嘴,27.污水箱,28.连接板,29.水箱,30.水泵,31.吊装线,32.第二导向轴,33.导向轴座,34.套筒,35.连接架,36.机架,37.第一绕线辊,38.第二绕线辊,39.丝杠,40.固定轴,41.转轴,42.第三电机,43.第一传动机构,44.第一夹线机构,44-1.丝杠螺母,44-2.安装板,44-3.第一夹持轮,44-4.滑块,44-5.第二夹持轮,45.第二传动机构,46.第二夹线机构,47.第五电机,48.第三传动机构,49.第三夹线机构,50.第四夹线机构,51.第四电机,52.行走机构,52-1.支架,52-2.支撑轴,52-3.从动轮,52-4.主动轮,52-5.辅助轮,53.工字型钢,54.激光测距仪,55.钢板,56.供电线伸缩检测机构,56-1.传感器支座,56-2.霍尔传感器,56-3.横杆,56-4.底座,57.清洗胶条座,58.压条,59.清洗胶条,60.供电线,61.激光测距仪,62.第一控制盒,63.第二控制盒。
具体实施方式
实施例1
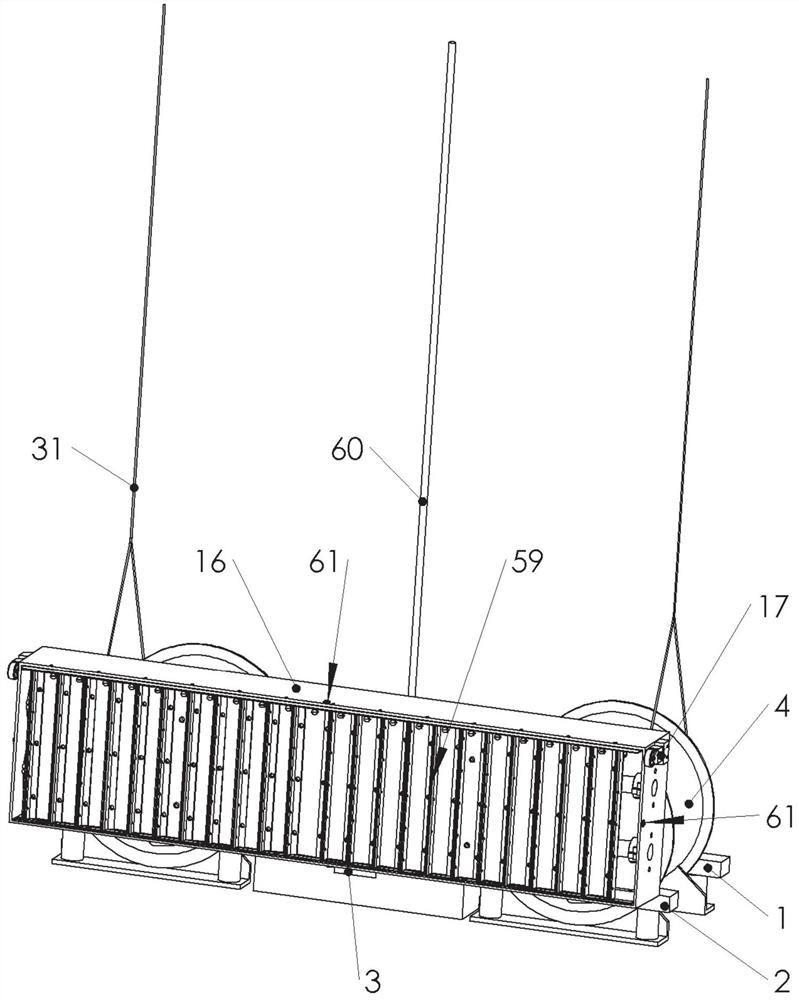
本实施例提供了一种高空玻璃幕墙清洗机构,如图1-图3所示,包括架体,所述架体上承载有风机、移动件、供水机构、清洗机构等部件,所述架体能够与吊装线连接,在起吊线的带动下进行运动,利用清洗机构对不同范围的玻璃幕墙进行清洗。
所述架体作为承载机构,可采用一个支撑板或框架式结构,本实施例中,由于架体利用吊装线起吊,所以为了最大程度的减少吊装线所受荷载,降低安全风险,所述架体采用框架式结构,重量轻。
进一步的,所述架体包括平行设置的第一支撑梁1和第二支撑梁2,所述第一支撑梁和第二支撑梁的中部位置通过支撑板3连接为一个整体。
为了使得整个清洗装置压向玻璃幕墙的荷载均衡,所述风机4设置两个,其中一个风机设置在第一支撑梁和第二支撑梁一端端部之间,另一个风机设置在第一支撑梁和第二支撑梁另一端的端部之间,且两个风机相对于第一支撑梁和第二支撑梁的中心线对称设置。
本实施例中,所述风机产生的风向为第一方向,第一方向为使用时垂直于玻璃幕墙的方向,风机底部沿第一方向的两端均设置有风机安装板5,针对同一个风机,其中一个风机安装板通过其两端设置的支撑柱6与第一支撑梁固定,另一个风机安装板通过其两端设置的支撑柱与第二支撑梁固定。
风机工作,能够产生沿第一方向的风力,进而对整个清洗装置施加朝向玻璃幕墙的作用力。
所述支撑板上表面安装有第一直线驱动机构,第一直线驱动机构能够输出沿第一方向的直线运动,所述第一直线驱动机构与移动件连接,能够带动移动件沿第一方向运动。
所述第一直线驱动机构可采用液压缸或气缸等能够输出直线运动的部件,但是采用液压缸或气缸输出直线运动时不能使输出距离进行微调,使得清洗机构对玻璃幕墙施加的力较大,容易造成玻璃幕墙的碰撞损坏。
因此,所述第一直线驱动机构采用齿轮和齿条的啮合原理进行运动输出,具体的,所述第一直线驱动机构包括安装在支撑板的第一驱动件,所述第一驱动件采用电机或液压马达等,优选的,所述第一驱动件采用第一电机7,所述第一电机的输出轴与齿轮8连接,能够带动齿轮转动,所述齿轮与齿条9相啮合,所述齿条固定在移动件的底面上,第一电机带动齿轮转动,能够利用齿轮和齿条的啮合作用带动移动件沿第一方向运动。
所述移动件采用移动板18,移动板的底面与齿条固定,移动板的底面两侧均设置有滑块11,滑块与第一导向轴10滑动连接,第一导向轴的两端与轴座12连接,两个轴座分别固定在第一支撑梁和第二支撑梁上,实现了对移动板的支撑。
所述移动板的底面还设置有限位开关13,限位开关能够与第二支撑梁接触,限制移动板移动的最大距离。
所述移动板用于靠近玻璃幕墙的一端安装有清洗机构,所述清洗机构用于与玻璃幕墙贴合,对玻璃幕墙进行清洗。
本实施例中,在风机的作用下,产生的风力荷载能够为清洗机构提供持续的压力,使清洗机构贴住玻璃幕墙,解决了因贴合力不足而导致清洗效率大幅下降的问题。
本实施例中,所述移动板设置两个连接座14,连接座与连接块15转动连接,且连接块与连接座之间设置有扭簧,连接块与清洗机构连接,实现了清洗机构与移动板转动连接,清洗机构能够通过连接座绕沿垂直于第一方向的第二方向的设定轴线转动,方便清洗机构与玻璃幕墙的自适应贴合。
如图4-图5所示,所述清洗机构包括支座16,所述支座与连接块固定连接,所述支座采用一侧敞口的盒体结构,包括竖向盒壁,位于竖向合璧上部边缘的顶部盒壁、位于竖向盒壁底部边缘的底部盒壁及位于竖向盒壁两个侧部边缘的侧部盒壁,敞口侧用于朝向玻璃幕墙设置。
所述盒体的顶部盒壁、底部盒壁及两个侧部盒壁均安装有第一激光测距仪61,用于检测障碍物的距离,以控制第一直线驱动机构工作,实现避障。
所述支座的两个侧部盒壁的外侧面设置有压力检测元件,本实施例中,所述压力检测元件采用压力霍尔传感器17,压力霍尔传感器能够与玻璃幕墙接触,检测清洗机构对玻璃幕墙施加的荷载大小。
所述支座敞口端的端面上下边缘处设置有密封胶条19,优选的,所述密封胶条采用橡胶材质制成,所述密封胶条能够与玻璃幕墙表面接触。
所述支座内部设置有安装板20,安装板与第二直线驱动机构连接,第二直线驱动机构能够带动安装板沿与第一方向垂直的第二方向做往复运动。所述第一方向和第二方向所在的平面在使用时垂直于玻璃幕墙所在的平面。
如图6所示,所述第二直线驱动机构包括安装在底部盒壁外侧面的第二驱动件,所述第二驱动件采用能够输出转动运动的设备,例如电机或液压马达或舵机等,优选的,本实施例的第二驱动件采用第二电机21,所述第二电机通过电机座22固定在底部盒壁的外侧面上,所述第二电机的输出轴与转轮23连接,能够带动转轮转动,所述转轮的偏心位置处与第一连接件24的一端铰接,第一连接件的另一端与第二连接件25的一端铰接,第二连接件的另一端通过连接板28与安装板20固定连接。
本实施例中,所述第一连接件采用鱼眼轴承,所述鱼眼轴承一端通过铰接杆与转轮的偏心位置处转动连接,第二连接件采用连接杆,鱼眼轴承的另一端与连接杆的一端转动连接,所述底部盒壁上开设有用于鱼眼轴承和连接杆穿过的开口。
如图7所示,进一步的,为了保证安装板运动的稳定性,所述支座内部固定有第二导向轴32,所述第二导向轴设置两根,第二导向轴的两端分别通过导向轴座33与两个侧部盒壁的内侧面固定,第二导向轴上滑动连接有套筒34,套筒与连接架35固定,连接架与安装板的一侧端面固定,连接板与连接架固定。
如图8所示,所述安装板的另一侧端面设置有多个等间隔设置的清洗胶条59,所述清洗胶条采用橡胶材质制成,清洗胶条垂直于支座的顶部盒壁和底部盒壁设置。本实施例中,所述安装板上设置有多个清洗胶条座57,清洗胶条通过压条58压紧固定在清洗胶条座上,方便对清洗胶条进行更换和安装。
清洗胶条能够与玻璃幕墙接触,对玻璃幕墙进行清洗。
所述安装板设置有多个喷嘴26,喷嘴设置在相邻两个清洗胶条之间,所述喷嘴与供水机构连接,喷嘴能够喷射出用于清洗玻璃幕墙的水,安装板、清洗胶条和喷嘴共同构成了清洗组件。
清洗时,所述密封胶条和清洗胶条均贴合住玻璃幕墙,喷嘴将清洗水喷射至玻璃幕墙表面,第二直线驱动机构带动安装板往复运动,清洗胶条对玻璃幕墙进行清洗,清洗胶条在单位时间内可对玻璃幕墙进行多次清洗,大幅提高了清洁的质量。
进一步的,为了防止清洗后产生的污水沿玻璃幕墙流下对玻璃幕墙造成污染,所述支座的底部盒壁上开设有多个污水口,污水口通过管路与污水箱27连通,污水箱固定在第一支撑梁和第二支撑梁的底面,用于对污水进行收集。
所述供水机构包括水箱29,所述水箱固定在移动板的上表面,所述水箱用于盛放清洗用水,所述水箱的出水口通过管路与水泵30的进水口连接,所述水泵的出水口通过管路与安装板上的多个喷嘴连接。
水泵能够驱动水箱内的清洗用水进入喷嘴并由喷嘴喷射出。
所述第一支撑梁和第二支撑梁的两端均设置有吊环,整个清洗装置能够通过吊环与吊装线连接,实现整个清洗装置的升降和水平运动。
所述清洗机构中的第一电机,第二电机、激光测距仪、压力霍尔传感器等元件与控制系统连接,控制系统安装在第一控制盒62内,第一控制盒固定在移动板上。
本实施例的工作方法为:
将第一支撑梁和第二支撑梁通过吊环与吊装线31连接,利用安装在建筑物顶部的提升装置带动整个清洗装置做升降运动和水平运动,第一直线驱动机构工作,带动清洗机构沿第一方向运动,当压力霍尔传感器检测到压力信息时,证明密封胶条和清洗胶条与玻璃幕墙表面贴合,风机启动,使得清理机构持续对玻璃幕墙施加压力,启动水泵和第二直线驱动机构,水泵将水箱内的清洗用水喷射至玻璃幕墙的表面,第二直线驱动机构带动安装板沿第二方向做往复运动,利用清洗胶条的往复运动对玻璃幕墙进行清洗,产生的污水通过污水口进入污水箱进行收集。
吊装线带动整个清洗装置做水平运动和竖直运动,实现整个玻璃幕墙的清洗,当第一激光测距仪检测到玻璃幕墙之间的连接框架时,第一直线驱动机构带动清洗机构收回,使得清洗机构离开玻璃幕墙,此时清洗装置可越过连接框架,采用上述相同的方法继续对玻璃幕墙进行清洗。
实施例2:
本实施例公开了一种高空玻璃幕墙清洗装置,包括实施例1所述的高空玻璃幕墙清洗机构,还包括升降横移机构,所述升降横移机构与用于安装在建筑物顶面的吊装架连接,升降横移机构通过吊装线与高空玻璃幕墙清洗机构连接。
升降横移机构能够通过吊装线带动高空玻璃幕墙清洗机构做竖向的升降运动和水平向的横移运动。
如图9所示,所述升降横移机构包括机架36,所述机架的内部设置有转轴41,转轴的两端与机架转动连接,转轴能够绕自身轴线转动。
所述转轴上安装有至少两个第一绕线辊37,优选的安装两个第一绕线辊37,第一绕线辊与转轴同轴设置,所述第一绕线辊上缠绕有吊装线,所述吊装线顶端缠绕固定在第一绕线辊的外周面上,底端连接高空玻璃幕墙清洗机构的架体。
所述转轴通过第一传动机构43与第三电机42的输出轴连接,所述第三电机固定在机架顶部,所述第一传动机构采用带传动机构。
现有的提升装置的卷筒收起吊装线时,吊装线无法均匀的分布在卷筒的筒面上,容易造成卷线半径过大,造成吊装线打结的现象,具有较大的安全隐患,因此本实施例在每个第一绕线辊下方设置第一夹线机构,吊装线从第一绕线辊上垂落的部分穿过第一夹线机构44,第一夹线机构能够在收线时带动吊装线沿第一绕线辊的轴线方向运动,进而使得吊装线均匀的缠绕排布在第一绕线辊的筒面上。
如图10所示,所述第一夹线机构包括配套使用的第一移动件和第二移动件。第一移动件和第二移动件之间设有夹持机构,夹持机构夹住第一绕线辊上吊装线垂落下的部分,同时将第一移动件和第二移动件连接,能够使得第一移动件和第二移动件做沿丝杠和固定轴轴线方向的同步运动。
所述第一移动件与设置在转轴下方的丝杠螺纹连接,所述丝杠的两端通过轴承与机架转动连接,所述第一移动件包括丝杠螺母44-1,所述丝杠螺母与丝杠螺纹连接,丝杠螺母靠近第二移动件的端部安装有U型的安装板44-2。
所述第二移动件与设置在转轴下方的固定轴滑动连接,固定轴两端与机架固定连接,所述第二移动件包括滑块44-4,滑块与固定轴滑动连接,滑块靠近第一移动件的端部安装有U型的安装板。
所述丝杠与固定轴的轴线均与转轴的轴线平行。
所述夹持机构采用夹持轮,即两个安装板之间设置有第一夹持轮44-3和第二夹持轮44-5,第一夹持轮和第二夹持轮的轴线水平设置且垂直于丝杠的轴线,第一夹持轮和第二夹持轮分别与两个U型的安装板转动连接。
所述第一夹持轮和第二夹持轮的轮面上均开始有线槽,所述吊装线通过线槽穿过第一夹持轮和第二夹持轮之间。
所述丝杠通过第二传动机构45与转轴连接,转轴的转动能够带动丝杠的转动,所述第二传动机构采用带传动机构,且丝杠上的从动带轮的直径于转轴上的主动带轮的直径相同。
本实施例中,所述第一夹线机构的下方还设置有第二夹线机构46,所述第二夹线机构安装在机架底部的上表面,所述第二夹线机构包括夹持轮座,所述夹持轮座上转动连接有两个夹持轮,两个夹持轮轴线于第一夹持轮和第二夹持轮的轴线平行,两个夹持轮夹住吊装线,通过设置第二夹线机构,能够对吊装线的走向进行定位,防止左右摆动时摩擦过大。
所述机架底部开设有通孔,所述吊装线的垂落部分通过通孔穿过机架后与高空玻璃幕墙清洗机构的架体上的吊环连接。
本实施例中,所述转轴上还设置有第二绕线辊38,所述第二绕线辊与转轴同轴设置且通过轴承与转轴转动连接,所述第二绕线辊上缠绕有供电线60,供电线的顶端与第二绕线辊缠绕固定,供电线用于对高空玻璃幕墙清洗机构的用电设备进行供电。
所述第二绕线辊通过第三传动机构48与第五电机47的输出轴连接,所述第五电机固定在机架的顶部,所述第五电机的输出轴通过第三传动机构48与第二绕线辊端部设置的传动套筒连接,能够通过传动套筒带动第二绕线辊的转动。
所述第三传动机构采用带传动机构。
所述第二绕线辊的下方设置有有第三夹线机构49,所述第三夹线机构的结构与第一夹线机构的结构相同,在此不进行详细叙述。
所述第三夹线机构的下方设置有第四夹线机构50,所述第四夹线机构安装在底板的上表面,其结构与第二夹线机构的结构相同,第四夹线机构起到的作用与第二夹线机构所起到的作用相同,再次不进行重复叙述。
所述机架底部开设有通孔,供电线穿过通孔后,与高空玻璃幕墙清洗机构的架体上的风机、泵、电机等用电设备连接,对其进行供电。
所述机架顶面还设置有行走机构52,如图11所示,所述行走机构包括第二转动驱动机构,所述第二转动驱动机构包括固定在机架顶面的第四电机51,第四电机的输出轴穿过固定在机架的支架52-1后通过齿轮传动与两个主动轮52-4连接,能够带动主动轮做同向转动。所述主动轮与安装在建筑物顶部的吊装架接触,从而带动整个升降横移机构沿水平框架做水平向运动,支架内部固定有两根横移支撑轴52-2,所述横移支撑轴能够与水平框架的底面接触。
如图12所示,本实施例中,所述吊装架采用工字型钢53,工字型钢的两端通过支撑部件固定在建筑物的顶部。
所述主动轮与工字型钢腹板一侧的下翼缘板上表面接触。
所述支架上还设置有两个从动轮52-3,从动轮与工字型钢腹板另一侧的下翼缘板上表面接触,从而保证了行走机构在工字梁上行走的稳定性。
为了进一步保证提升装置在工字型钢上行走的稳定性,所述行走机构设置在机架的一端,顶板顶面的另一端通过辅助轮支架连接有两个辅助轮52-5,两个辅助轮分别与工字梁腹板两侧的下翼缘板上表面接触。
所述机架上还安装有第二激光测距仪54,本实施例中,所述激光测距仪安装在机架侧部,激光测距仪能够与设置在建筑物顶部的参考机构配合,控制架体的水平移动距离。所述参考机构可采用固定在建筑物顶部的钢板55或墙等。本实施例中,所述钢板与工字型钢的端部固定。
本实施例中,还设置有备用水平框架,用于对水平框架进行延长。
如图13所示,所述机架的下方还设有供电线伸缩检测机构56,所述供电线伸缩检测机构包括横杆56-3,横杆一端与固定在架体底面的底座56-4转动连接,横杆设有圆环,所述供电线穿过圆环,横杆的另一端设置在两个霍尔传感器56-2之间,两个霍尔传感器通过传感器支座56-1固定在机架底面,横杆端部与两个霍尔传感器之间均设置有弹簧56-5,所述霍尔传感器与控制系统连接,控制系统与三个电机连接,能够控制三个电机的工作。
当供电线被拉紧时,位于上方的霍尔传感器会被按下,控制系统检测到上方的霍尔传感器被按下,控制第三电机进行放线,当供电线下方有较大冗余时,下方的霍尔传感器被按下,控制系统检测到下方的霍尔传感器被按下,控制第三电机收线,正常状态下,由于弹簧的存在,两个霍尔传感器都不会被按下。
通过此种设置,保证供电线不受过大的力,防止供电线断线。
本实施例中,所述升降横移机构的电机、霍尔传感器等元件与控制系统连接,控制系统安装在第二控制盒63内,第二控制盒安装在顶板上。
本实施例的工作方法为:将两个第一绕线辊上垂落下来的吊装线与清洗设备连接,将第二绕线辊垂落下来的供电线与高空玻璃幕墙清洗机构的用电元件连接,第一绕线辊在第三电机的作用下转动,对吊装线进行收起或释放,第二绕线辊在第五电机的作用下转动,对供电线收起或释放,进而带动清洗设备进行起升或下降,工作人员对玻璃幕墙进行清洗。
当对吊装线和供电线收起时,转轴通过第二传动机构带动丝杠转动,进而第一夹线机构和第三夹线机构能够分别带动吊装线和供电线沿丝杠轴线方向移动,进而使得吊装线沿第一绕线辊轴线方向均匀的排布在第一绕线辊表面,使得供电线沿第二绕线辊的轴线方向均匀排布在第二绕线辊表面,防止卷线半径过大或卷线打结现象。
同时,霍尔传感器能够实时检测供电线是收拉还是松弛,由于第二绕线辊与转轴通过轴承转动连接,因此可以单独调节第二绕线辊的转速,使得供电线达到合适的状态,避免供电线损坏。
当需要调节水平方向的清洗位置时,第四电机工作,带动整个提升装置沿水平方向行走,利用第二激光测距仪检测行走距离,并将检测得到的距离传输给控制系统,控制系统控制第四电机,使得整个提升装置的水平向移动距离达到目标要求。
上述虽然结合附图对本发明的具体实施方式进行了描述,但并非对本发明保护范围的限制,所属领域技术人员应该明白,在本发明的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本发明的保护范围以内。
- 一种高空玻璃幕墙清洗机构及清洗装置
- 一种智能化多功能玻璃幕墙高空清洗设备的清洁机构