一种腹腔镜手术训练装置
文献发布时间:2023-06-19 19:33:46
技术领域
本发明涉及外科手术技术领域,特别涉及一种腹腔镜手术训练装置。
背景技术
腹腔镜手术训练装置包括模拟人体腹部的仿形外壳和腹腔器件连接板;仿形外壳的外部开设有多个用于器械伸入的训练孔;而腹腔器件连接板用于固定腹腔内部的器官。
在腹腔镜手术中,大多数医院都采取3个孔的方法,肚脐眼的地方一个,加上肚脐眼与两侧髂前上棘连线的外1/3处各1个,也就大概在肚脐水平线往两边13-15cm,再往下3-5cm的位置。现有的腹腔镜训练装置,一般是预先在仿形外壳的表面上开设好训练孔,训练孔的位置固定,且不能够移动调节。但由于每一个人的体格不一致,肚皮脂肪厚度、个体器官位置存在差异,为此,手术实际操作中,表皮到器官手术位置以及器官手术的角度也存在差异。故,现有的腹腔镜训练装置与实际手术形成较大的差异,训练位置和训练效果单一,难以实现全面训练的效果。
发明内容
本发明的目的在于针对现有技术的缺陷和不足,提供一种腹腔镜手术训练装置。
为实现上述目的,本发明采用的技术方案是:
本发明所述的一种腹腔镜手术训练装置,它包括有仿形壳体和设置在仿形壳体内部的腹腔器件连接板;所述腹腔器件连接板的上表面设置有连接板勾面;器官模型件上固定有黏贴固定在连接板勾面上的模型毛面;所述仿形壳体的上表面开设有三个条形凹槽;其中一个条形凹槽通过肚脐眼位置并沿人体的高度方向延伸;另外两个条形凹槽呈“八”字形状的对称分布在通过肚脐眼位置的条形凹槽两侧;所述条形凹槽的中部设置有条形孔;所述条形凹槽的内底壁上固定有孔座勾面;训练孔设置在孔座的内部;所述孔座的底部环绕一圈设置有孔座毛面。
所述腹腔器件连接板上固定有转动杆;所述转动杆用于实现腹腔器件连接板在仿形壳体上做升降运动和旋转运动的两个动作。
进一步地,所述仿形壳体的底表面呈开口状。
进一步地,所述仿形壳体的外侧表面设置有外侧导向槽;外侧导向槽从仿形壳体的胸部表面向仿形壳体的背部表面延伸;所述仿形壳体的内侧表面设置有与外侧导向槽相互平行的内侧导向槽;所述外侧导向槽内设置有外导向块;所述外导向块的宽度等于外侧导向槽的宽度;所述外导向块上固定有螺母;所述转动杆上设置有与螺母螺纹连接的外螺纹;
所述内侧导向槽内设置有内导向块;所述内导向块的宽度等于内侧导向槽的宽度;所述内导向块上固定有伸出到仿形壳体外部的连接杆;连接杆伸出外部的一端固定有推板;所述推板与转动杆远离外导向块的一端转动连接;所述连接杆外套有弹簧;所述连接杆上滑动连接有外压板;所述弹簧一端压紧在推板上;弹簧另一端将外压板压紧在仿形壳体的外侧壁上;
在外侧导向槽的中部设置有能够通过转动杆的第二过轴槽;
内侧导向槽的中部设置有能够通过转动杆的第一过轴槽,第一过轴槽和第二过轴槽均从仿形壳体的胸部表面向仿形壳体的背部表面延伸。
进一步地,所述第一过轴槽和第二过轴槽均贯穿至仿形壳体的背部。
进一步地,所述内侧导向槽的内表面上沿内侧导向槽的长度方向排列有多个内侧齿槽;
所述内导向块上设置有与内侧齿槽相啮合的第一齿牙;
所述外侧导向槽的内表面上沿外侧导向槽的长度方向排列有多个外侧齿槽;所述外导向块上设置有与外侧齿槽相啮合的第二齿牙。
进一步地,所述外压板与仿形壳体接触的一表面上转动连接有多个小辊筒。
进一步地,所述转动杆上固定有把手;把手用于转动转动杆。
进一步地,所述仿形壳体的两侧设置有向内凹入的腰部;
所述腹腔器件连接板上表面的水平高度沿两腰部的连线方向从左至右先增大后减小;所述腹腔器件连接板的上表面沿转动杆的长度方向呈连续凹凸形状。
采用上述结构后,本发明有益效果为:本发明所述的一种腹腔镜手术训练装置,在使用时,孔座毛面为圆形状,能够转换孔座的角度,实现孔座上训练孔的角度旋转;孔座可拆卸连接在条形凹槽上,且能够黏贴在条形孔长度方向的任何位置,不仅方便拆卸,而且能够切换三个训练孔之间的相对位置以及三个训练孔与肚脐眼之间的相对位置;模拟不同体格训练孔的开设,能够产生多种训练情形,实现不同的训练效果。器官模型件通过模型毛面粘贴固定在连接板勾面的表面上,能够粘贴在连接板勾面的任何位置,通过调节转动杆在仿形壳体上的高度,实现训练孔与器官模型件之间的高度差调节;再加上转动转动杆带动腹腔器件连接板的角度旋转,实现器官模型件的手术位置角度调节,能够模拟不同体脂厚度人体进行训练,且能适应不同器官位置和角度的手术训练,丰富了训练情形,也能实现不同的训练效果。
附图说明
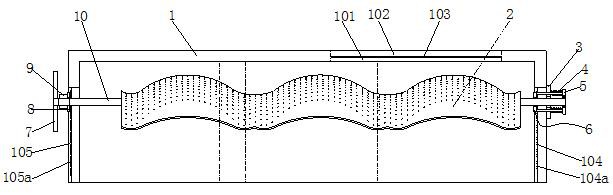
图1是本发明的结构示意图;
图2是本发明的拆出腹腔器件连接板后的结构图;
图3是推板和内导向块连接在转动杆上的结构图;
图4是仿形壳体的结构图;
图5是器官模型件与腹腔器件连接板的立体视角爆炸图;
图6是腹腔器件连接板的结构图;
图7是孔座的结构图;
附图标记说明:
A、器官模型件;A1、模型毛面;B、孔座;B1、孔座毛面;B2、训练孔;
1、仿形壳体;101、条形孔;102、条形凹槽;103、孔座勾面;
104、内侧导向槽;104a、内侧齿槽;104b、第一过轴槽;
105、外侧导向槽;105a、外侧齿槽;105b、第二过轴槽;106、腰部;
2、腹腔器件连接板;201、连接板勾面;3、外压板;4、弹簧;5、推板;
6、内导向块;601、第一齿牙;7、把手;8、外导向块;
801、第二齿牙;9、螺母;10、转动杆;11、小辊筒;12、连接杆。
具体实施方式
下面结合附图对本发明作进一步的说明。
如图1至图7所示,本发明所述的一种腹腔镜手术训练装置,它包括有仿形壳体1和设置在仿形壳体1内部的腹腔器件连接板2;所述腹腔器件连接板2的上表面设置有连接板勾面201;器官模型件A上固定有黏贴固定在连接板勾面201上的模型毛面A1;所述仿形壳体1的上表面开设有三个条形凹槽102;其中一个条形凹槽102通过肚脐眼位置并沿人体的高度方向延伸;另外两个条形凹槽102呈“八”字形状的对称分布在通过肚脐眼位置的条形凹槽102两侧;所述条形凹槽102的中部设置有条形孔101;所述条形凹槽102的内底壁上固定有孔座勾面103;训练孔B2设置在孔座B的内部;所述孔座B的底部环绕一圈设置有孔座毛面B1;孔座毛面B1为圆形状,能够转换孔座B的角度,实现孔座B上训练孔B2的角度旋转;孔座B能够可拆卸连接在条形凹槽102上,且能够黏贴在条形孔101长度方向的任何位置,不仅方便拆卸,而且能够切换三个训练孔B2之间的相对位置以及三个训练孔B2与肚脐眼之间的相对位置;模拟多种不同体格训练孔B2开设,能够产生多种训练情形,实现不同的训练效果。
所述腹腔器件连接板2上固定有转动杆10;所述转动杆10用于实现腹腔器件连接板2在仿形壳体1上做升降运动和旋转运动的两个动作;
实现人体内的器官能够在体内具有小范围的活动空间;
器官模型件A的模型毛面A1粘贴固定在连接板勾面201的表面上,由于连接板勾面201与模型毛面A1之间并非完全固定的连接,而是在模型毛面A1粘贴固定在连接板勾面201后,器官模型件A依然能够相对腹腔器件连接板2能够有一些的活动范围;能够更加准确地模拟器械与体内器官触碰的情景。
器官模型件A的模型毛面A1能够粘贴在连接板勾面201的任何位置,通过调节转动杆10在仿形壳体1上的高度,实现训练孔B2与器官模型件A之间的高度差调节;再加上转动转动杆10带动腹腔器件连接板2的角度旋转,实现器官模型件A的手术位置角度调节,能够模拟多种不同体脂厚度人体进行训练,且能适应不同器官位置和角度的手术训练位置,丰富了训练情形,也能实现不同的训练效果。
作为本发明的一种优选方式,所述仿形壳体1的底表面呈开口状;仿形壳体1设置开口状后,通过转动转动杆10带动腹腔器件连接板2转动,使得腹腔器件连接板2带有连接板勾面201的一表面朝下,方便腹腔器件连接板2上的器官模型件A更换。
作为本发明的一种优选方式,所述仿形壳体1的外侧表面设置有外侧导向槽105;外侧导向槽105沿从仿形壳体1的胸部表面向仿形壳体1的背部表面延伸;所述仿形壳体1的内侧表面设置有与外侧导向槽105相互平行的内侧导向槽104;内侧导向槽104沿仿形壳体1的高度方向贯穿至仿形壳体1的底表面;所述外侧导向槽105内设置有外导向块8;所述外导向块8的宽度等于外侧导向槽105的宽度;所述外导向块8上固定有螺母9;所述转动杆10上设置有与螺母9螺纹连接的外螺纹;
所述内侧导向槽104内设置有内导向块6;所述内导向块6的宽度等于内侧导向槽104的宽度;所述内导向块6上固定有伸出到仿形壳体1外部的连接杆12;连接杆12伸出外部的一端固定有推板5;所述推板5与转动杆10远离外导向块8的一端转动连接;所述连接杆12外套有弹簧4;所述连接杆12上滑动连接有外压板3;所述弹簧4一端压紧在推板5上;弹簧4另一端将外压板3压紧在仿形壳体1的外侧壁上;
在外侧导向槽105的中部设置有能够通过转动杆10的第二过轴槽105b;
内侧导向槽104的中部设置有能够通过转动杆10的第一过轴槽104b,第一过轴槽104b和第二过轴槽105b均从仿形壳体1的胸部表面向仿形壳体1的背部表面延伸;
通过按压推板5同时推动转动杆10,使得内导向块6脱离内侧导向槽104,外导向块8脱离外侧导向槽105,转动杆10就能够沿第一过轴槽104b和第二过轴槽105b做升降滑动,进行调节腹腔器件连接板2的位置,实现腹腔器件连接板2表面上器官模型件A相对训练孔B2的深度调节;到达指定位置后,撤去对推板5的压力,弹簧4的作用下,推动推板5并拉动转动杆10,将内导向块6重新嵌入到内侧导向槽104内,外导向块8重新嵌入到外侧导向槽105内,外导向块8不能够在外侧导向槽105内转动;通过外侧导向槽105内壁对外导向块8的阻力和内侧导向槽104内壁对内导向块6的阻力,实现转动杆10和腹腔器件连接板2在仿形壳体1上固定;在外导向块8嵌入到外侧导向槽105后,通过转动转动杆10使得腹腔器件连接板2绕转动杆10的轴心转动,实现腹腔器件连接板2上器官模型件A的角度调节。
作为本发明的一种优选方式,所述第一过轴槽104b和第二过轴槽105b均贯穿至仿形壳体1的背部;通过第一过轴槽104b和第二过轴槽105b贯穿至仿形壳体1的背部,使得整根转动杆10和腹腔器件连接板2能够被拆出与仿形壳体1分离,方便维修和清洗。
作为本发明的一种优选方式,所述内侧导向槽104的内表面上沿内侧导向槽104的长度方向排列有多个内侧齿槽104a;
所述内导向块6上设置有与内侧齿槽104a相啮合的第一齿牙601;
所述外侧导向槽105的内表面上沿外侧导向槽105的长度方向排列有多个外侧齿槽105a;所述外导向块8上设置有与外侧齿槽105a相啮合的第二齿牙801;在内导向块6嵌入到内侧导向槽104内,外导向块8嵌入到外侧导向槽105内后,通过的第一齿牙601啮合在内侧齿槽104a上,第二齿牙801啮合在外侧齿槽105a上,再加上弹簧4的拉力,使得腹腔器件连接板2、推板5、内导向块6、外导向块8和转动杆10组成的系统能够稳固地固定在仿形壳体1上。
作为本发明的一种优选方式,所述外压板3与仿形壳体1接触的一表面上转动连接有多个小辊筒11;小辊筒11用于实现压板3与仿形壳体1的滚动连接,使得推板5在被按压时,同时向推板5一个沿仿形壳体1厚度方向的力即可使得腹腔器件连接板2、推板5、内导向块6、外导向块8和转动杆10组成的系统能够做升降运动,方便训练者能够单手调节腹腔器件连接板2在仿形壳体1内部的高度。
作为本发明的一种优选方式,转动杆10上固定有把手7;把手7用于转动转动杆10。
作为本发明的一种优选方式,仿形壳体1的两侧设置有向内凹入的腰部106;
腹腔器件连接板2上表面的水平高度沿两腰部106的连线方向从左至右先增大后减小;所述腹腔器件连接板2的上表面沿转动杆10的长度方向呈连续凹凸形状;
转动杆10的长度和两腰部106的连线方向之间为相互垂直并且处于同一个水平面的两条线,腹腔器件连接板2的高度通过横向方向的先增后减、纵向方向的连续凹凸和转动杆10旋转调整角度结合,再加上器官模型件A能够粘贴在腹腔器件连接板2表面的任意位置,使得腹腔器件连接板2表面上器官模型件A的手术位置和角度能够在三维方向的调整,进一步地丰富了训练的情景。
在使用本发明时,孔座毛面B1为圆形状,能够转换孔座B的角度,实现孔座B上训练孔B2的角度旋转;孔座B能够可拆卸连接在条形凹槽102上,且能够黏贴在条形孔101长度方向的任何位置,不仅方便拆卸,而且能够切换三个训练孔B2之间的相对位置以及三个训练孔B2与肚脐眼之间的相对位置;模拟不同体格训练孔B2的开设,能够产生多种训练情形,实现不同的训练效果;器官模型件A通过模型毛面A1粘贴固定在连接板勾面201的表面上,能够粘贴在连接板勾面201的任何位置,通过按压推板5同时推动转动杆10,使得内导向块6脱离内侧导向槽104,外导向块8脱离外侧导向槽105,转动杆10就能够沿第一过轴槽104b和第二过轴槽105b做升降滑动,进行调节腹腔器件连接板2的位置,实现腹腔器件连接板2表面上器官模型件相对训练孔B2的深度调节;到达指定位置后,撤去对推板5的压力,在弹簧4的作用下,推动推板5并拉动转动杆10,将内导向块6重新嵌入到内侧导向槽104内,外导向块8重新嵌入到外侧导向槽105内,外导向块8不能够在外侧导向槽105内转动;通过外侧导向槽105内壁对外导向块8的阻力和内侧导向槽104内壁对内导向块6的阻力,实现转动杆10和腹腔器件连接板2在仿形壳体1上固定;在外导向块8嵌入到外侧导向槽105后,通过转动转动杆10使得腹腔器件连接板2绕转动杆10的轴心转动,实现腹腔器件连接板2上器官模型件A的角度调节,能够模拟不同体脂厚度人体的手术训练,且能适应不同器官位置和角度的手术训练位置,丰富了训练情形,也能实现不同的训练效果。腹腔器件连接板2的高度通过横向方向的先增后减、纵向方向的连续凹凸和转动杆10旋转调整角度结合,再加上器官模型件A能够粘贴在腹腔器件连接板2表面的任意位置,使得腹腔器件连接板2表面上的器官模型件A的手术位置和角度能够在三维方向的调整,进一步地丰富了训练的情景。
以上所述仅是本发明的较佳实施方式,故凡依本发明专利申请范围所述的构造、特征及原理所做的等效变化或修饰,均包括于本发明专利申请范围内。
- 一种腹腔镜手术辅助训练装置
- 一种虚拟腹腔镜手术的力反馈装置及双手训练设备