一种用于消防救援的外骨骼装置
文献发布时间:2024-01-17 01:28:27
技术领域
本发明涉及救援器械技术领域,具体而言,涉及一种用于消防救援的外骨骼装置。
背景技术
在消防救援和抢险救援中,很多受灾区域救援车辆无法有效进出,这对救援的时效性有非常大的影响。因此在车辆等运输方式进入受灾区域进行救援前,需先让救援人员携带救援装备和补给徒步先行。而人体生理承受能力有限,制约消防员的负重重量,导致徒步输送的物资有限,且消防员徒步过程中负重重量会影响行进速度,因此需要可以改善徒步行进的装备。
发明内容
本发明公开了一种用于消防救援的外骨骼装置,旨在改善现有徒步救援时消防人员负重重量小且影响行进速度的问题。
本发明采用了如下方案:
一种用于消防救援的外骨骼装置,包括背部组件、腰部组件、腿部组件、驱动结构以及控制件;其中,所述背部组件包括用以放置物品的承重箱以及与所述承重箱连接的背带;所述腰部组件包括固定板,所述承重箱与所述固定板固定连接,所述固定板的两侧对称配置有腿部组件;所述腿部组件包括大腿负重杆、小腿负重杆、脚踝连接件以及接地件;所述大腿负重杆其一端与所述固定板铰接,另一端与所述小腿负重杆铰接,所述脚踝连接件两端分别与所述小腿负重杆和接地件铰接;人体通过腰带、大腿绑带、小腿绑带对应与所述固定板、大腿负重杆、小腿负重杆绑定限位,所述承重箱的重量依次经由所述固定板、大腿负重杆、小腿负重杆、脚踝连接件传递至所述接地件,并经由所述接地件传递至地面;所述驱动结构包括推动件、导轨、滑块以及连杆,所述导轨配置在所述大腿负重杆上,所述滑块被限制在所述导轨的滑动槽内移动,所述连杆其一端与所述滑块连接,另一端与所述小腿负重杆连接;所述控制件与所述推动件相电连接,所述推动件经由所述控制件驱使以对应人体腿部运动伸长或者缩短,从而辅助所述小腿负重杆动作。
作为进一步改进,所述推动件为电动推杆,所述电动推杆上设有磁体,所述导轨沿所述滑动槽的长度方向上设有霍尔传感器,所述霍尔传感器与所述控制件相电连接,所述控制件通过接收所述霍尔传感器传递的信号,以对应驱使所述推动杆伸长或者缩短。
作为进一步改进,所述电动推杆的头部与所述滑块适配连接,所述电动推杆具有自由行程,当人体腿部运动时,驱使所述滑块移动,此时所述电动推杆在自由行程内移动,所述霍尔传感器通过所述磁体探测所述电动推杆的移动方向,以使所述控制件对应驱使所述电动推杆伸长或者缩短。
作为进一步改进,所述大腿负重杆包括大腿固定杆和大腿调节杆,所述大腿固定杆上设有多个第一调节孔,所述大腿调节杆上设有第一容置腔,所述第一容置腔上贯通设有第一安装孔,所述大腿固定杆其一端置入所述第一容置腔内,并经由紧固件将所述第一安装孔与所需的第一调节孔对位锁紧。
作为进一步改进,所述小腿负重杆包括小腿固定杆和小腿调节杆,所述小腿固定杆上设有多个第二调节孔,所述小腿调节杆上设有第二容置腔,所述第二容置腔上贯通设有第二安装孔,所述小腿固定杆其一端置入所述第二容置腔内,并经由紧固件将所述第二安装孔与所需的第二调节孔对位锁紧。
作为进一步改进,所述大腿负重杆上设有第一装配部,所述大腿绑带穿过所述第一装配部以与人体大腿围合绑定;所述小腿负重杆上设有第二装配部,所述小腿绑带穿过所述第二装配部与人体小腿围合绑定。
作为进一步改进,所述接地件与脚板连接,所述脚板上设有用以与脚部绑定的脚部绑带。
通过采用上述技术方案,本发明可以取得以下技术效果:
本申请的外骨骼在穿戴时人体将手臂穿过背带,人体腰部、大腿和小腿分别通过腰带、大腿绑带、小腿绑带对应与固定板、大腿负重杆、小腿负重杆绑定限位,使得承重箱的重量依次经由固定板、大腿负重杆、小腿负重杆、脚踝连接件传递至接地件,并经由接地件传递至地面,从而减轻人体的负重,加快行进速度,同时能够增加消防人员单次输送的物资重量,加快救援。
此外,推动件经由控制件驱使以对应人体腿部运动伸长或者缩短,从而辅助小腿负重杆动作,增强消防员肢体力量,大幅度减轻救援人员的体力消耗,提高抢险工作效率,增加连续作业时间。例如,在腿部弯曲时,小腿负重杆驱使连杆推动导轨内的滑块沿导轨向上移动,此时,推动件收缩回到原位;当关节向外伸展时,推动件伸长以推动滑块沿导轨移动向下移动同时联动连杆,以推动小腿负重杆前进移动。当处于直立状态时,推动件将滑块沿导轨向膝盖关节方向推至底部,为小腿负重杆提供支撑力。
附图说明
为了更清楚地说明本发明实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
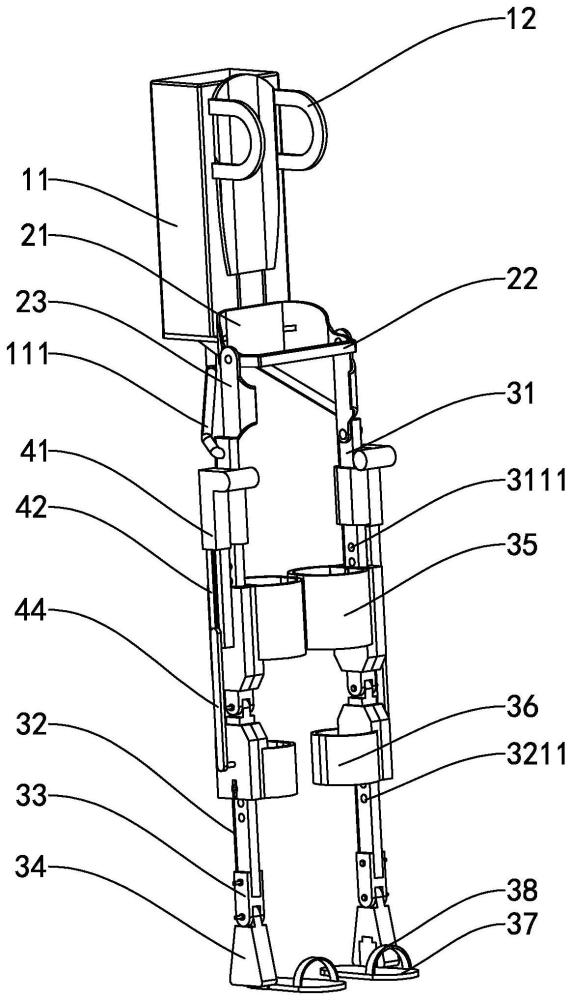
图1至图3是本发明其中一实施例在不同视角下的结构示意图;
图4是本发明其中一实施例的剖视图;
图5和图6是本发明其中一实施例在行走时不同视角下的结构示意图;
图7是本发明其中一实施例的推动件伸长时的结构示意图;
图8是本发明其中一实施例的推动件缩短时的结构示意图。
图标:
11-承重箱;111-支撑杆;12-背带;
21-固定板;22-腰带;23-连接板;
31-大腿负重杆;311-大腿固定杆;3111-第一调节孔;312-大腿调节杆;3121-第一容置腔;32-小腿负重杆;321-小腿固定杆;3211-第二调节孔;322-小腿调节杆;3221-第二容置腔;33-脚踝连接件;34-接地件;35-大腿绑带;36-小腿绑带;37-脚板;38-脚部绑带;
41-推动件;411-磁体;42-导轨;421-霍尔传感器;43-滑块;44-连杆。
具体实施方式
为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
实施例
结合图1至图8,本实施例提供了一种用于消防救援的外骨骼装置,包括背部组件、腰部组件、腿部组件、驱动结构以及控制件;其中,背部组件包括用以放置物品的承重箱11以及与承重箱11连接的背带12;腰部组件包括固定板21,承重箱11与固定板21固定连接,固定板21的两侧对称配置有腿部组件;腿部组件包括大腿负重杆31、小腿负重杆32、脚踝连接件33以及接地件34;大腿负重杆31其一端与固定板21铰接,另一端与小腿负重杆32铰接,脚踝连接件33两端分别与小腿负重杆32和接地件34铰接;人体通过腰带22、大腿绑带35、小腿绑带36对应与固定板21、大腿负重杆31、小腿负重杆32绑定限位,承重箱11的重量依次经由固定板21、大腿负重杆31、小腿负重杆32、脚踝连接件33传递至接地件34,并经由接地件34传递至地面;驱动结构包括推动件41、导轨42、滑块43以及连杆44,导轨42配置在大腿负重杆31上,滑块43被限制在导轨42的滑动槽内移动,连杆44其一端与滑块43连接,另一端与小腿负重杆32连接;控制件与推动件41相电连接,推动件41经由控制件驱使以对应人体腿部运动伸长或者缩短,从而辅助小腿负重杆32动作。
优选地,接地件34与脚板37连接,脚板37上设有用以与脚部绑定的脚部绑带38。外骨骼整体可以采用轻型材质,减少外骨骼对使用者的负担。
需要提到的是,本实施例的外骨骼在穿戴时人体将手臂穿过背带12,人体腰部、大腿、小腿、脚部分别并通过腰带22、大腿绑带35、小腿绑带36、脚部绑带38对应与固定板21、大腿负重杆31、小腿负重杆32、脚板37绑定限位,使得承重箱11的重量依次经由固定板21、大腿负重杆31、小腿负重杆32、脚踝连接件33传递至所述接地件34,并经由接地件34传递至地面,从而减轻人体的负重,加快行进速度,同时能够增加消防人员单次输送的物资重量,加快救援。
此外,推动件41经由控制件驱使以对应人体腿部运动伸长或者缩短,从而辅助所述小腿负重杆32动作,增强消防员肢体力量,大幅度减轻救援人员的体力消耗,提高抢险工作效率,增加连续作业时间。例如,在腿部弯曲时,小腿负重杆32驱使连杆44推动导轨42内的滑块43沿导轨42向上移动,此时,推动件41收缩回到原位;当关节向外伸展时,推动件41伸长以推动滑块43沿导轨42移动向下移动同时联动连杆44,以推动小腿负重杆32前进移动。当处于直立状态时,推动件41将滑块43沿导轨42向膝盖关节方向推至底部,为小腿负重杆32提供支撑力。需要说明的是,直立状态分为持续直立和临时直立,控制件上设置时间阈值,当直立时间超过阈值时,为持续直立,此时推动件41长度锁定;当直立时间在阈值内时,推动件41长度不锁定。其中,控制件可以是电路板,其内部电路原理以及电路结构为现有技术,在此不再赘述。
在其中一种实施方式中,控制件与肌肉传感器连接,通过肌肉传感器探测人体的运动趋势,以使控制件对应驱使推动件41伸长或者缩短,从而为外骨骼提供动力辅助,肌肉传感器的工作原理为现有技术。
在上述实施例的基础上,本发明一可选的实施例中,推动件41为电动推杆,通过电机带动推杆伸缩,电动推杆上设有磁体411,导轨42沿滑动槽的长度方向上设有霍尔传感器421,霍尔传感器421与控制件相电连接,控制件通过接收霍尔传感器421传递的信号,以对应驱使电动推杆伸长或者缩短。在其中一种实施方式中,电动推杆的头部与滑块43适配连接,电动推杆具有一定的自由行程,当人体腿部运动时,驱使连杆44移动,以使滑块43带动电动推杆在自由行程内移动,霍尔传感器421将磁体411移动方向的信号传输至控制件,以使控制件根据移动方向驱使电动推杆伸长或者缩短。例如,当人体膝盖弯曲时,小腿负重杆32上的连杆44带动导轨42内的滑块43驱使电动推杆在自由行程内向上移动,霍尔传感器421探测到电动推杆上的磁体411移动,控制件通过判断移动方向驱使电动推杆收缩,当人体腿部向外展开时,小腿负重杆32上的连杆44带动导轨42内的滑块43驱使电动推杆在自由行程内向下移动,控制件通过判断移动方向驱使电动推杆伸长,从而辅助小腿负重杆32向前移动,减轻人体负重。需要说明的是,电动推杆的自由行程较小,控制件在驱使电动推杆动作反应时间很短,因此可以很好的辅助小腿负重杆32移动。
在一优选的实施例中,大腿负重杆31包括大腿固定杆311和大腿调节杆312,大腿固定杆311上设有多个第一调节孔3111,大腿调节杆312上设有第一容置腔3121,第一容置腔3121上贯通设有第一安装孔,大腿固定杆311其一端置入第一容置腔3121内,并经由紧固件将第一安装孔与所需的第一调节孔3111对位锁紧。小腿负重杆32包括小腿固定杆321和小腿调节杆322,小腿固定杆321上设有多个第二调节孔3211,小腿调节杆322上设有第二容置腔3221,第二容置腔3221上贯通设有第二安装孔,小腿固定杆321其一端置入第二容置腔3221内,并经由紧固件将第二安装孔与所需的第二调节孔3211对位锁紧。例如,第一调节孔3111沿大腿固定杆311的长度方向等距设置,第二调节孔3211沿小腿固定杆321的长度方向等距设置,固定板21的两侧设有连接板23,连接板23的两端分别与固定板21和大腿固定杆311连接,与承重箱11固定的支撑杆111的轴部为连接板23与大腿固定杆311的铰接轴,大腿调节杆312与小腿调节杆322铰接配置,穿戴时,将大腿固定杆311沿第一容置腔3121滑入,当第一安装孔与所需的第一调节孔3111对位时,用紧固件锁紧,同理,小腿固定杆321沿第二容置腔3221滑入,当第二安装孔与所需的第二调节孔3211对位时,用紧固件锁紧,从而调整大腿和小腿的长度,以适用不同高度的穿戴者,其中紧固件可以是螺栓,不仅限于此,不作具体限定。
较佳地,大腿负重杆31上设有第一装配部,大腿绑带35穿过第一装配部以与人体大腿围合绑定;小腿负重杆32上设有第二装配部,小腿绑带36穿过第二装配部与人体小腿围合绑定。装配部设计呈槽状,绑带上采用魔术贴的方式贴合,在其他实施例中,绑带一端与装配部固定,另一端通过卡扣结构绑定。
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。
- 一种用于穿戴式外骨骼助力机器人的足底压力测量装置
- 一种专用于消防部队灭火救援现场的有毒有害气体监测系统及数据传输处理方法
- 一种基于高层建筑消防救援装置
- 一种消防救援可穿戴助力外骨骼机器人装置
- 一种消防救援髋关节助力外骨骼机器人