一种基于鲸鱼MUSIC算法的气体泄漏源估计方法
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及气体泄漏检测和定位技术领域,具体为一种基于鲸鱼MUSIC算法的气体泄漏源估计方法。
背景技术
压力容器是一种可以承受压力的气密容器,在工业和生活等领域中广泛使用。但是由于存在自身老化、操作不当、输送过程颠簸等问题,气体泄漏事故频发。一旦发生泄漏,人员生命和社会财产的损失不容小觑。因此,研究压力容器泄漏检测理论,利用信息技术迅速准确地估计气体泄漏位置并及时处理,对于减少和杜绝因气体泄漏所引起的危害具有重要的社会意义和应用价值。
根据检测原理,泄漏检测方法一般可分为非声学检测法和声学检测法两类。非声学检测法主要有氦质谱检测法、负压波法、红外热成像法等,但这些方法在可行性、检测效率和精度等方面存在较大的局限性。而声学的检测方法对泄漏监测敏感,能迅速准确地估计泄漏位置以便安全人员采取应对措施。基于声传感器阵列的定位方法中,多信号分类算法(Multiple Signal Classification,MUSIC)是阵列信号处理中的一个经典方法,可以通过求解声传感器信号间的相关矩阵来定出方向角以及俯仰角,且分辨率和估计精度不随角度的改变而变降低,但该算法搜索谱峰前需对特征值进行分解,迭代计算量大,难以应用于工程。
随着对多信号分类谱峰搜索研究的发展,越来越多的改进方法被提出,其中群智能算法尤为突出。该类算法具有较强的搜索能力,容易与其他算法结合改善算法性能。此前已经有将遗传算法、粒子群优化算法、蝙蝠算法等很好地应用于谱峰搜索的实例,但仍存在收敛速度慢、计算量过大等缺点。
发明内容
本发明的目的在于提供一种基于鲸鱼MUSIC算法的气体泄漏源估计方法,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种基于鲸鱼MUSIC算法的气体泄漏源估计方法,包括如下步骤,
S1:建立该系统的声传感器阵列模块,利用声波传感器接收气体泄漏声音信号。
S2:获取对气体泄漏定位的声传感器阵列接收到的数据,与二维MUSIC算法相结合,获得MUSIC谱估计表达式,将表达式作为目标函数,即,
S3:在上述基础上加入鲸鱼优化算法,对谱峰搜索迭代过程进行优化,依次对算法参数初始化、对种群初始化、计算个体适应度、开始迭代以及判断算法是否满足终止条件这5个过程,最终得到迭代后的最优解即为最终的待估计方向角(θ,β)。
优选的,所述S1中的阵列为一个边长20cm的正方形区域,选用4个声波传感器分别置于正方形的四个直角形成面阵,快拍数SNAP=100,搜索角度范围为(0°,90°],噪声为高斯白噪声,信噪比取10dB。
优选的,所述S3中引入鲸鱼优化算法包括如下步骤,
S31:算法参数初始化。设置鲸鱼种群规模大小为SN,维数dim=2,随机产生初始种群。最大迭代次数为T
S32:初始化鲸鱼种群。在定义域内,按照定义式
随机产生初始化鲸鱼种群个体的位置x
其中,rand()表示生成[0,1]内的随机数。
S33:计算个体适应度。计算每个鲸鱼个体位置的适应度,f[x
S34:开始迭代。在区间(-1,1)内生成随机数p,判断p是否满足p≥0.5,若满足,则按照泡泡网攻击公式X(t+1)=X
其中,X
S35:判断算法是否满足终止条件。迭代次数t若是达到最大迭代次数T
与现有技术相比,本发明的有益效果是:本发明的鲸鱼MUSIC算法在快拍数较小和信噪比较低的情况下,相对于传统的MUSIC算法均可以获得较为满意的估计精度,同时减少了运算量、提高了运算速度、保证了实时性,体现了该算法的优越性。
附图说明
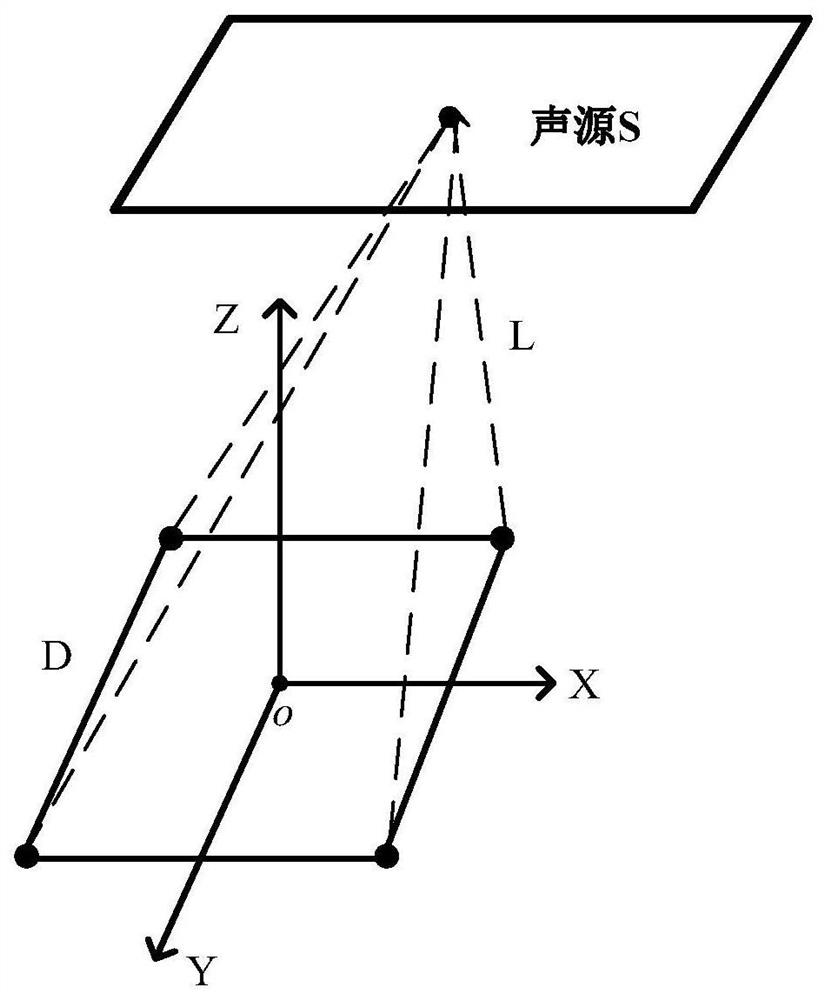
图1为本发明声传感器阵列模块结构示意图;
图2为本发明算法流程结构示意图;
图3为本发明引入鲸鱼优化算法谱峰估计流程结构示意图;
图4为本发明实验结果仿真结构示意图;
图5为本发明不同快拍数下各种算法搜索成功率对比结构示意图;
图6为本发明不同信噪比下各种算法搜索成功率对比结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1:
请参阅图1-6,一种基于鲸鱼MUSIC算法的气体泄漏源估计方法,包括如下步骤,
用图1所示的声传感器阵列对气体泄漏声信号进行采集,
本发明采用均匀面阵来估计空间谱的角度。有互相独立的窄带信号源分别以二维方向角(θ,β)入射到阵元数为M的均匀面阵上,以坐标原点阵元为参考阵元,则阵元接收到的数据为:
X(t)=A(θ,β)S(t)+N(t)
式中,
X(t)=[x
S(t)=[s
N(t)=[n
A(θ,β)=[a
假设各阵元上的噪声为平稳、空间和时间均不相关的高斯白噪声,信号源信号为未知的确定性信号,则接收信号的协方差矩阵为:
式中,U
由于现实阵列中采样点数是有限的,且信号子空间和噪声子空间特征导向矢量具有的正交特性,所以信号的协方差矩阵的最大似然估计可表示如下:
对
即可以得到MUSIC算法的谱估计函数为:
对上式进行谱峰搜索,使(θ,β)变化,从而寻找谱波峰对应的角度即为所需估计的波达方向角。
加入鲸鱼优化算法,对谱峰搜索迭代过程进行优化,
将鲸鱼算法引入二维MUSIC算法,即二维MUSIC算法的功率谱函数式
为鲸鱼算法的目标函数。每只鲸鱼的位置代表待估计方向角在第i次迭代中的一个解,经过多次迭代后得到的最优解即为最终的待估计方向角。利用鲸鱼算法求解功率谱函数的执行过程如图3所示:
步骤1:算法参数初始化。设置鲸鱼种群规模大小为SN,维数dim=2,随机产生初始种群。最大迭代次数为T
步骤2:初始化鲸鱼种群。在定义域内,按照定义式
随机产生初始化鲸鱼种群个体的位置x
其中,rand()表示生成[0,1]内的随机数。
步骤3:计算个体适应度。计算每个鲸鱼个体位置的适应度,f[x
步骤4:开始迭代。在区间(-1,1)内生成随机数p,判断p是否满足p≥0.5,若满足,则按照泡泡网攻击公式X(t+1)=X
其中,X
步骤5:判断算法是否满足终止条件。迭代次数t若是达到最大迭代次数T
最终得到的数据和经典MUSIC算法搜索用时比较如下表所示:
表1 WOA算法与传统最小值优化方法搜索用时比较
由表1比较可知,在保证估计有效性的前提下,WOA算法可以更快地收敛于峰值(即最优解),大幅加快DOA估计的计算速度,平均节省时间达99%以上,满足了实际环境中对搜索实时性的要求。
对比实施例1:
分别采用改进的粒子群算法(PSO)、蝙蝠算法(BA)、鲸鱼算法与二维DOA算法相结合对泄源估计,设置参数如下:
(1)改进的PSO:种群规模大小为SN=30,学习因子c
(2)BA:维度为2,种群规模大小为SN=30,音量A=0.8,脉冲率r=0.95,最大迭代次数T
(3)WOA:位置维度为2,种群规模大小为SN=30,螺旋线系数b=1,选择概率P=0.5,最大迭代次数T
表2几种不同仿生算法估计泄源结果分析
从表2结果对比分析中发现在相同的估计环境下,WOA优化算法的方差与均方根误差的结果均优于其余两种生物算法,说明该算法稳定性高且估计效果好,均方根误差始终小于2°。
参数对估计性能的影响。均匀面阵接收到入射角为(35°,70°)的信号,保持信噪比10dB为不变,改变快拍数从100到1100变化,每隔100快拍数对三种算法分别进行100次蒙特卡洛实验,将引入改进的粒子群算法、蝙蝠算法和鲸鱼算法对谱峰搜索的结果进行比较,给出识别成功率曲线如图5所示,发现当快拍数不同时,蝙蝠算法、粒子群算法和本文算法都能进行峰值估计,蝙蝠算法识别成功率始终保持在40%-50%之间,粒子群算法成功率在60%-70%之间,而本文算法成功率明显高于这两种算法,成功率普遍在95%以上;则相较之下本文算法受快拍数影响比较小,说明该算法适应性好;同时,保持快拍数为1000不变,改变信噪比从-10dB到25dB变化,每隔5dB对两种算法分别进行100次蒙特卡洛实验,对以上三种算法搜索结果进行比较,给出成功率曲线如图6所示,无论信噪比为何值,蝙蝠算法、粒子群算法和本文算法都能进行峰值估计,但本文算法搜索成功率始终是最高的,均在95%以上。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种基于鲸鱼MUSIC算法的气体泄漏源估计方法
- 一种基于去相干的酉Root-MUSIC算法的DOA估计方法