一种基于双陀螺仪控制的自动驾驶农机
文献发布时间:2023-06-19 09:57:26
技术领域
本发明属于农机技术领域,尤其涉及一种基于双陀螺仪控制的自动驾驶农机 。
背景技术
我国农业机械化程度越来越高,大大提高了农业的生产力。但传统的机械应用完全依赖人工操作,劳动强度大,对驾驶员技能要求高,作业质量无法保证,夜间作业质量更低甚至无法作业;尤其针对播种、开沟、覆膜、起垄、中耕、打药等对直线度及结合线精度要求较高的作业,无法保证质量和效率,导致土地浪费严重,作业损耗严重。目前已有很多农机自动驾驶系统,可以有效提高农业自动化作业。
然而目前的农机自动驾驶方案普遍存在导航精度不高,同时,农机作业时受轮胎磨损程度和地形状况等因素影响,行驶过程中累计误差逐渐造成航向偏离,需要反复调整,不能够有效实现农机精确按照预设线路自动行驶,因此需要一种能够自动调整航向的农机,使农机可以长时间按照既定导航路线精确行驶。
发明内容
本发明的目的在于:为了解决现有技术容易导航精度低,受轮胎磨损程度和地形状况等因素影响,容易产生收割遗漏的问题,而提出的一种基于双陀螺仪控制的自动驾驶农机 。
为了实现上述目的,本发明采用了如下技术方案:
一种基于双陀螺仪控制的自动驾驶农机 ,包括车身和底盘,所述底盘前后分别连接有前桥和后桥,所述前桥包括前车轮、前连接臂和转向机构,所述前连接臂两端分别连接有转向盘,且所述转向盘分别转动连接两个前车轮,所述前连接臂靠近其中一个转向盘的一端上方设置有第一陀螺仪,且所述前连接臂靠近另一个转向盘的一侧设置有缓冲机构,所述转向机构包括转向机和与转向机轴端连接的转向杆,所述转向杆两端分别连接转向盘,所述后桥包括后车轮和后连接臂,所述后连接臂的中间位置设置有第二陀螺仪,所述缓冲机构包括壳体和从动杆,所述壳体朝向转向杆的一侧开设有滑槽,所述从动杆限位在滑槽内并延伸至壳体外与转向杆铰接,所述从动杆的一端延伸至所述壳体的内腔且末端转动连接有第一齿轮,所述第一齿轮的转轴与所述壳体的底壁转动连接,所述第一齿轮远离所述从动杆的一侧啮合连接有第二齿轮,所述第二齿轮通过转轴转动连接有角度传感器,所述第一齿轮上开设有弧形滑槽,所述从动杆靠近所述第一齿轮的一端两侧分别设置有容差机构,所述容差机构包括第一弹簧、挡板、和凸台,所述凸台通过螺柱穿过第一齿轮与壳体固定在所述凸台的顶面,所述第一弹簧的两端分别与所述挡板和所述从动杆固定连接,且所述第一弹簧与左右两侧的所述挡板连接处分别设有第一压力传感器和第二压力传感器。
优选的,所述第二齿轮下方设置有固定在壳体底部的支撑台,所述第二齿轮通过转轴固定在支撑台上,第一齿轮与所述第二齿轮的轴心连接线与所述壳体底端平行。
优选的,所述第二齿轮的为半圆形结构,且所述第二齿轮的半圆端面一侧通过第二弹簧连接有支板,所述支板固定在支撑台上。
优选的,所述车身上方设置有Gnss天线,用以接收导航系统转角信号,所述底盘上设置有控制器,所述控制器分别与第一陀螺仪、第二陀螺仪、转向机、角度传感器及Gnss天线电连接,所述控制器控制转向机的左右轴伸缩驱动转向杆带动前车轮进行转向。
优选的,所述第一陀螺仪与第二陀螺仪均为单轴陀螺仪,所述前车轮的转向角θ为
其中ωa为所述第二陀螺仪的Z轴角速度,ωb为所述第一陀螺仪的Z轴角速度。
优选的,所述角度传感器测得的角度值为γ,所述第一齿轮与第二齿轮的齿轮比为b,所述车身转向角为bγ所述农机导航的累计误差为
其中n为控制器采集对比所述车身转向角与所述前车轮的转向角θ实时比较数量。
优选的,所述第一压力传感器和第二压力传感器实时检测所述第一弹簧对左、右挡板的压力,且所述第一压力传感器测得的压力值为F
优选的,所述弧形滑槽与第一齿轮同心。
优选的,所述第一齿轮与第二齿轮的齿轮比为b≥4。
优选的,所述后连接臂上设置有驱动机构用以车轮驱动。
综上所述,由于采用了上述技术方案,本发明的有益效果是:
1、本发明中,通过两只陀螺仪实时进行角度纠偏,可以避免单一陀螺仪检测故障造成农机自动驾驶过度偏离的问题,同时整个导航过程中,通过两只陀螺仪耦合了陀螺的误差,即上个时刻的位置速度姿态误差等影响比较大的误差源,从而提高导航精度。
2、本发明中,通过角度传感器可以及时进行检测发现农机作业时因为地况环境影响前车轮发生的微小偏转,并通过控制器进行纠正,而农机长时间作业后陀螺仪的角度测量值就会产生累计误差,控制器每隔一段时间采集角度传感器的测量值和两只陀螺仪测量的角度值进行累计误差统计,当累计误差超过允差范围,控制器控制陀螺仪进行角度纠偏,从而进一步提高了自动驾驶农机的精确导航;
3、本发明中,通过容差机构中的第一压力传感器和第二压力传感器实时检测第一弹簧对左、右挡板的压力,有效判定车身调正,从而可以根据每个转向过程中的转角累计误差反馈到控制器中,控制器对两只陀螺仪进行一次角度纠偏,提高下一个转向过程的转向角度,提高导航精度,使得农机高效、高质量的作业。
附图说明
图1为本发明一种基于双陀螺仪控制的自动驾驶农机的结构示意图;
图2为本发明一种基于双陀螺仪控制的自动驾驶农机的底盘结构示意图;
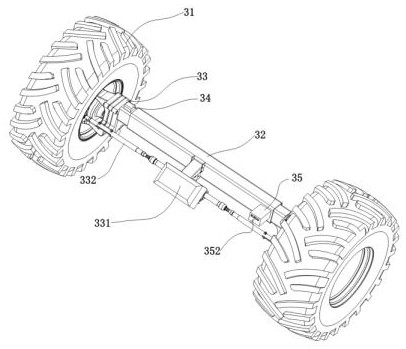
图3为本发明一种基于双陀螺仪控制的自动驾驶农机的前桥结构示意图;
图4为本发明一种基于双陀螺仪控制的自动驾驶农机的前桥俯视图;
图5为本发明一种基于双陀螺仪控制的自动驾驶农机的后桥俯视图;
图6为本发明一种基于双陀螺仪控制的自动驾驶农机的缓冲机构示意图;
图7为本发明一种基于双陀螺仪控制的自动驾驶农机的剖面示意图。
图例说明:
1、车身;2、底盘;3、前桥;31、前车轮;32、前连接臂;33、转向机构;331、转向机;332、转向杆;34、第一陀螺仪;35、缓冲机构;351、壳体;352、从动杆;353、滑槽;354、第一齿轮;355、第二齿轮;356、第二弹簧;357、支板;358、弧形滑槽;359、支撑台; 36、转向盘;4、后桥;41、后车轮;42、后连接臂;43、第二陀螺仪;44、驱动机构;5、容差机构;51、第一弹簧;52、挡板;53、凸台;7、Gnss天线。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
实施例1
参考图1-7,一种基于双陀螺仪控制的自动驾驶农机 ,包括车身1和底盘2,底盘2前后分别连接有前桥3和后桥4,前桥3包括前车轮31、前连接臂32和转向机构33,后桥4包括后车轮41和后连接臂42,后连接臂42上设置有驱动机构44用以车轮驱动,转向机构33包括转向机331和与转向机331轴端连接的转向杆332,前连接臂32两端分别连接有转向盘36,且转向盘36分别转动连接两个前车轮31,转向杆332两端分别与转向盘36铰接,前连接臂32靠近其中一个转向盘36的一端上方设置有第一陀螺仪34,车身1上方设置有Gnss天线7,用以接收导航系统转角信号,底盘2上设置有控制器,控制器与第一陀螺仪34和Gnss天线7电连接,控制器接收Gnss天线7的导航定位信号控制转向机331的左右轴伸缩驱动转向杆332带动前车轮31进行转向,通过第一陀螺仪34实时检测的转角,对农机进行导航,自动驾驶作业。
实施例2
在实施例1的基础上,后连接臂42的中间位置设置有第二陀螺仪43,第二陀螺仪43与控制器电连接,第一陀螺仪34与第二陀螺仪43均为单轴陀螺仪,前车轮31的转向角为
其中ωa为第二陀螺仪43的Z轴角速度,ωb为第一陀螺仪34的Z轴角速度。
通过两只陀螺仪实时进行角度纠偏,可以避免单一陀螺仪检测故障造成农机自动驾驶过度偏离的问题,同时整个导航过程中,通过两只陀螺仪耦合了陀螺的误差,即上个时刻的位置速度姿态误差等影响比较大的误差源,从而提高导航精度。
实施例3
前连接臂32靠近另一个转向盘36的一侧设置有缓冲机构35,缓冲机构35包括壳体351和从动杆352,壳体351朝向转向杆332的一侧开设有滑槽353,从动杆352限位在滑槽353内并延伸至壳体351外与转向杆332铰接,当转向杆332在进行伸缩时,带动从动杆352进行偏转,其偏转角度与车身整体偏转角度 一致,从动杆352的一端延伸至壳体351的内腔且末端转动连接有第一齿轮354,第一齿轮354的转轴与壳体351的底壁转动连接,第一齿轮354远离从动杆352的一侧啮合连接有第二齿轮355,第一齿轮354上开设有弧形滑槽358, 弧形滑槽358与第一齿轮354同心,第二齿轮355下方设置有固定在壳体351底部的支撑台359,第二齿轮355通过转轴固定在支撑台359上, 第二齿轮355为半圆形结构,且第二齿轮355的半圆端面一侧通过第二弹簧356连接有支板357,支板357固定在支撑台359上,第一齿轮354与第二齿轮355的轴心连接线与壳体351底端平行,第二齿轮355通过转轴转动连接有角度传感器6,角度传感器6与控制器电连接,角度传感器6测得的角度值为γ,第一齿轮354与第二齿轮355的齿轮比为b,b≥4,第一齿轮355的偏转角度与从动杆352一致,第二齿轮355的角速度是第一齿轮354的b倍,则车身转向角为
其中n为控制器采集对比车身1转向角与前车轮31的转向角θ实时比较数量,
由于角度传感器6测量的角度值是完全取决于从动杆352的变化,也就是农机转向的某一定时间段是一个定值,由于第二齿轮355的角速度是第一齿轮354的b倍,可以有效提高角度传感器6的检测灵敏度,当农机作业时因为地况环境影响前车轮31发生微小偏转时,角度传感器6可以及时进行检测发现,并通过控制器进行纠正,而农机长时间作业后陀螺仪的角度测量值就会产生累计误差,控制器每隔一段时间采集角度传感器的测量值和两只陀螺仪测量的角度值进行累计误差统计,当累计误差超过允差范围,控制器控制陀螺仪进行角度纠偏,从而提高了自动驾驶农机的精确导航。
实施例4
从动杆352靠近第一齿轮354的一端两侧分别设置有容差机构5,容差机构5包括第一弹簧51、挡板52、和凸台53,凸台53通过螺柱穿过第一齿轮354与壳体351底部固定,挡板52固定在凸台53的顶面,第一弹簧51的两端分别与挡板52和从动杆352固定连接,且第一弹簧51与左右两侧的挡板52连接处分别设有第一压力传感器和第二压力传感器, 第一压力传感器和第二压力传感器实时检测第一弹簧51对左、右挡板52的压力,且第一压力传感器测得的压力值为F
- 一种基于双陀螺仪控制的自动驾驶农机
- 一种基于EPS的农机自动驾驶系统及控制方法