换电系统
文献发布时间:2023-06-19 10:30:40
技术领域
本发明涉及换电设备领域,尤其是一种换电系统。
背景技术
目前对新能源车辆的电能补给方式主要有充电和换电两种,其中,充电存在等待时间长,需额外返回充电站等不足,并且大大降低了电动重卡的作业效率。对于换电方式,将电动重卡用完或即将用完的电池取出并放入充电站进行充电,同时将满电电池放入电动重卡内,满足电动重卡继续作业的要求。
通常,新能源重卡所使用的电池重量比较大,人工换电效率低下,且一旦出现操作不规范或电池位姿误差,容易卡住,损坏电池和重卡,严重的还会引发电池起火爆炸等危险事故。
发明内容
为克服上述缺点,本发明的目的在于提供一种在较短时间内为重卡换电,增加重卡的经济效益、结构集约式,安装、维护方便,节约成本、保护电池和重卡的换电系统。
为了达到以上目的,本发明采用的技术方案是:一种换电系统,用于为车辆更换电池箱,包括:换电机器人;电池架,存储有电池箱,所述换电机器人通过多级伸缩机构将所述车辆的电池箱移动至货叉架体,并在所述换电机器人移动至预设位置后将所述电池箱通过所述多级伸缩机构伸缩以将所述电池箱放入所述电池架;或所述换电机器人从所述电池架通过所述多级伸缩机构伸缩以从所述电池架抓取所述电池箱至所述货叉架体,并在所述换电机器人移动至所述车辆处,通过所述多级伸缩机构伸缩,以将所述电池箱放置于所述车辆。
本发明一种换电系统的有益效果是,相较于现有技术,通过换电机器人、电池架多级伸缩机构的配合设置,能在较短时间内为重卡换电,增加重卡的经济效益,结构集约式,安装、维护方便,节约成本,保护电池和重卡。
优选地,所述多级伸缩机构的端部设有导向柱,用于插入所述电池箱的导向套以存取所述电池箱;以及,所述电池架设有多层,每层设有多个用于存放所述电池箱的单元格,所述单元格内设有充电插头,在所述电池箱被所述换电机器人存储于所述单元格时,所述电池箱通过所述充电插头充电。
优选地,所述换电机器人包括框架、货叉机构、设于所述框架的行走机构和提升机构,所述行走机构用于带动所述框架移动,所述提升机构连接于所述货叉机构,用于牵引所述货叉机构移动,其特征在于,所述货叉机构包括货叉架体和多级伸缩机构,所述多级伸缩机构包括:
基座和驱动机构,所述基座连接于所述货叉架体;
第一伸缩机构包括第一伸缩臂、第一传动链和一对第一传动轮;所述第一伸缩臂沿伸缩方向移动地连接于所述基座;所述一对第一传动轮转动地连接于所述第一伸缩臂,所述第一传动链绕过所述一对第一传动轮并沿所述第一伸缩臂的伸缩方向延伸,形成位于所述一对第一传动轮之间的第一连接部和第二连接部;所述驱动机构于驱动连接点连接所述第一伸缩臂,所述第一传动链的第一连接部于第一连接点连接于所述基座;第二伸缩机构,包括第二伸缩臂,所述第二伸缩臂沿伸缩方向移动地连接于所述第一伸缩臂;所述第一传动链的第二连接部于第二连接点连接于所述第二伸缩臂;在所述驱动机构驱动所述第一伸缩臂沿所述基座移动时,所述第一传动轮跟随所述第一伸缩臂移动,牵引所述第一传动链的第二连接部与所述第一伸缩臂同向移动以带动所述第二伸缩臂沿所述第一伸缩臂同向移动,使得所述多级伸缩机构的第一伸缩臂和第二伸缩臂朝向所述货叉架体的两侧伸出或者缩回。通过第一传动链带动第二伸缩臂沿第一伸缩臂移动实现沿伸缩方向向两端伸缩。而且,还可以根据实际需要,通过设置驱动连接点和第二连接点的位置,设置第一伸缩臂和第二伸缩臂向两端伸出的最大行程,尤其适合为新能源车辆更换电池箱时,对车辆存取电池箱的行程与对电池架存取电池箱的行程不一致的情况,可以根据需要设置上述的多级伸缩机构朝向车辆的伸缩行程和朝向电池架的伸缩行程,实现非对称式存取电池箱。
优选地,还包括第三伸缩臂,所述第三伸缩臂沿伸缩方向移动地连接于所述第二伸缩臂;所述第二伸缩机构还包括第二传动链和一对第二传动轮,所述一对第二传动轮转动地连接于所述第二伸缩臂,所述第二传动链绕过所述一对第二传动轮并沿所述第二伸缩臂的伸缩方向延伸,形成位于所述一对第二传动轮之间的第三连接部和第四连接部,所述第二传动链的第三连接部于第三连接点连接所述第一伸缩臂,所述第四连接部于第四连接点连接于所述第三伸缩臂;在所述第二伸缩臂沿所述第一伸缩臂移动时,所述第二传动轮跟随所述第二伸缩臂移动,牵引所述第二传动链的第四连接部与所述第二伸缩臂同向移动以带动所述第三伸缩臂沿所述第二伸缩臂移动。
优选地,在所述第二伸缩臂处于收回状态下,所述第二连接点位于所述第一传动链的端部,使得所述第二伸缩臂的第二连接点所在的端部的伸缩行程小于另外一端部的伸缩行程;以及,在所述第三伸缩臂处于收回状态下,所述第四连接点位于所述第二传动链的端部,使得所述第三伸缩臂的第四连接点所在的端部的伸缩行程小于另外一端部的伸缩行程。
优选地,所述驱动机构包括:驱动电机;驱动轮,转动地连接于所述基座并且与所述第一驱动电机连接,所述驱动轮与所述第一伸缩臂连接,用于在所述第一驱动电机的驱动下,带动所述第一伸缩臂相对所述基座移动。
优选地,在所述第一伸缩臂处于收回状态下,所述驱动连接点位于所述第一伸缩臂的移动行程的端部,使得所述第一伸缩臂的驱动连接点所在的端部的伸缩行程小于另外一端部的伸缩行程。
优选地,所述提升机构包括:提升电机,设于所述框架;一对第一提升轮和第一提升链,沿竖直方向排列并转动地连接于所述框架,所述第一提升链绕过所述一对第一提升轮并且沿竖直方向延伸,所述一对第一提升轮至少之一连接于所述提升电机,用于在所述提升电机的驱动下转动以带动所述第一提升链沿竖直方向移动;第二提升轮和第二提升链,所述第二提升轮转动地连接于所述框架,所述第二提升链的一端连接于所述货叉架体,另外一端沿竖直方向延伸绕过所述第二提升轮连接于所述第一提升链,用于在所述第一提升链移动时,带动所述货叉架体沿竖直方向移动。
附图说明
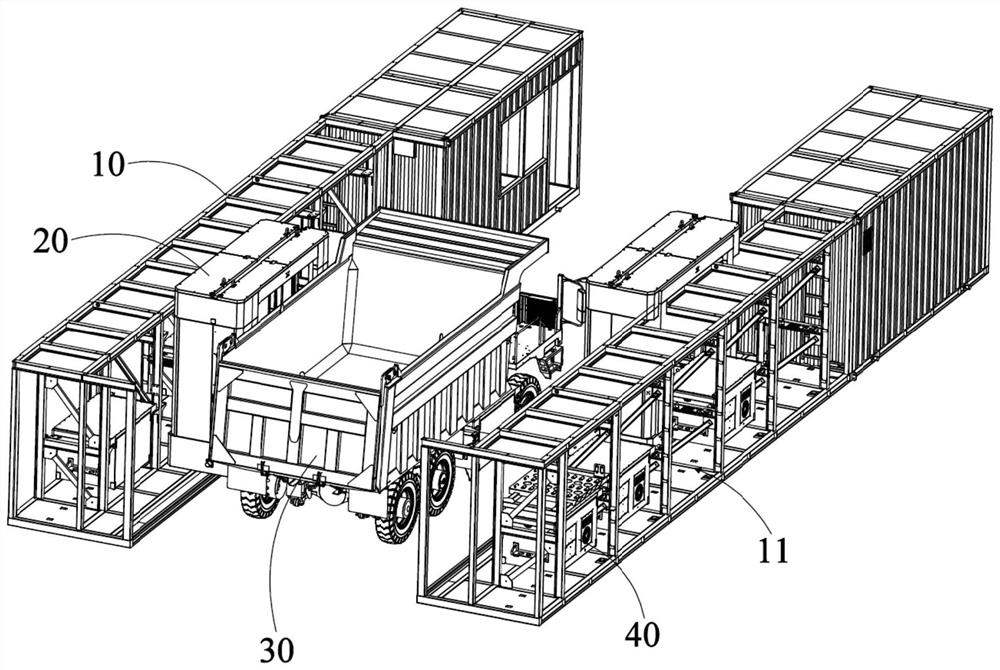
图1是换电系统的结构示意图。
图2是车辆的结构示意图。
图3是电池箱的结构示意图。
图4是换电机器人的结构示意图。
图5是行走机构的结构示意图。
图6是提升机构的结构示意图。
图7是货叉机构的结构示意图。
图8是多级伸缩机构的结构示意图。
图9是多级伸缩机构的爆炸图。
图10是基座和驱动机构的结构示意图。
图11是第一伸缩机构的结构示意图。
图12是第二伸缩机构的结构示意图(朝向第一伸缩臂)。
图13是第二伸缩机构的结构示意图(远离第一伸缩臂)。
图14是第二伸缩臂、第一传动链和基座的结构示意图。
图15是第三伸缩臂的结构示意图。
具体实施方式
下面结合附图对本发明的较佳实施例进行详细阐述,以使本发明的优点和特征能更易于被本领域技术人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
图1是换电系统的结构示意图。如图1所示,换电系统用于为车辆30更换电池箱40,包括换电机器人20和电池架10,换电机器人20可以将电池架10上充满电的电池箱40,更换至车辆30,并将车辆30的电池箱40放置于电池架10,完成对车辆30的换电作业。
所述电池架10可以设有多层,每层设有多个用于存放所述电池箱40的单元格11,所述单元格11内设有充电插头,在所述电池箱40被所述换电机器人20存储于所述单元格11时,所述电池箱40通过所述充电插头充电。
图2是车辆30的结构示意图。车辆30连接有电池箱40,电池箱40设置在车辆30的侧方,例如可以设置在车辆30的两侧的位置。本实施方式中,电池架10可以设置在换电区域的两侧,每个电池架10的内侧设有换电机器人20,待车辆30驶入预设位置(电池架10之间)后,车辆30上的电池箱40定位锁紧装置解锁后,换电机器人20启动换电作业,为车辆30更换电池。
图3是电池箱40的结构示意图,如图3所示,作为示例性的,电池箱40的两侧设有支撑部41,支撑部41上设有导向套42,使得换电机器人20可以通过多级伸缩机构242伸出至支撑部41的下方,并且在多级伸缩机构242的端部设置导向柱24241,在托起电池箱40时,导向柱24241插入导向套42内以便于移动电池箱40。
在需要对车辆30更换电池时,所述换电机器人20通过多级伸缩机构242将所述车辆30的电池箱40移动至换电机器人20,并在所述换电机器人20移动至预设位置后将所述电池箱40通过所述多级伸缩机构242反向伸缩以将所述电池箱40放入所述电池架10。然后,所述换电机器人20从所述电池架10通过所述多级伸缩机构242伸缩以从所述电池架10抓取所述电池箱40至所述换电机器人20,并在所述换电机器人20移动至所述车辆30处,通过所述多级伸缩机构242反向伸缩,以将所述电池箱40放置于所述车辆30。
换电过程中,发明人发现,由于换电机器人20对车辆30存取电池箱40的操作距离与对电池架10存取电池箱40的操作距离不相同,导致换电机器人20对车辆30和对电池架10的伸缩行程不同。现有的换电机器人20一般采用对称式结构,即,换电机器人20对车辆30和对电池架10的最大伸缩行程相同,为了满足换电机器人20能够对车辆30和电池架10存取电池箱40,需要以车辆30和电池架10要求的较大的伸缩行程作为换电机器人20的伸缩行程,这对换电机器人20的控制和结构设计均带来了较大的难度。为此,本公开提供的换电机器人20采用非对称式结构设计,使得换电机器人20向两侧伸缩的最大行程不相同,而且可以根据实际需要调节两侧的最大伸缩行程,简化了换电机器人20的控制和结构设计。
图4是换电机器人20的结构示意图。如图4所示,换电机器人20包括框架21、行走机构23、提升机构22和货叉机构24。
框架21大体呈矩形的架体结构,用于支持重载换电机器人20的各机构。所述行走机构23用于带动所述框架21移动,所述提升机构22连接于所述货叉机构24,用于牵引所述货叉机构24沿竖直方向移动。所述货叉机构24用于从所述框架21伸出或者缩回以取回或者存储电池箱40。
图5是行走机构23的剖面示意图。如图5所示,所述行走机构23包括行走电机231、行走底座232和行走轮233。行走底座232连接于所述框架21的底部,行走轮233通过一转轴234转动地连接于所述行走底座232。行走电机231连接于所述行走轮233,用于驱动所述行走轮233转动。本实施方式中,行走电机231连接于变速箱,变速箱连接于同轴连接在转轴234的主动齿轮以带动所述转轴234转动,从而带动行走轮233转动。通过对行走电机231的转速和转向控制,可以实现重载换电机器人20的行走至预定位置。
图6是提升机构22的结构示意图。如图6所示,所述提升机构22包括提升电机221、一对第一提升轮222和第一提升链2221、第二提升轮223和第二提升链2231。
提升电机221设于所述框架21,一对第一提升轮222分别转动地沿竖直方向布置在框架21的两端,可以极大地增加第一提升链2221的单线程长度。第一提升链2221绕过该一对第一提升轮222,并且沿竖直方向延伸。本实施方式中,所述第一提升轮222的数量为2对,每对第一提升轮222绕过一条第一提升链2221。所述一对第一提升轮222至少之一连接于所述提升电机221,用于在所述提升电机221的驱动下转动以带动所述第一提升链2221沿竖直方向移动。
所述第二提升轮223转动地连接于所述框架21,所述第二提升链2231的一端连接于所述货叉机构24,另外一端沿竖直方向延伸绕过所述第二提升轮223连接于所述第一提升链2221,用于在所述第一提升链2221移动时,通过第二提升链2231带动所述货叉机构24沿竖直方向移动。本实施方式中,为了更为平衡地连接货叉机构24,第二提升轮223的数量为四个,分别设置在框架21的四角。对应的,第二提升链2231的数量为四条,分别连接于货叉机构24的四角,然后分别绕过第二提升轮223连接于第一提升链2221。这样,通过控制第一提升链2221的行程方向,进而控制货叉机构24的升降操作。可以理解,当第一提升链2221的行程长度较长时,控制的货叉机构24的升降距离也较长,从而得以实现对更大范围的电池箱40进行存取操作。
图7是货叉机构24的结构示意图。如图7所示,所述货叉机构24包括货叉架体241和多级伸缩机构242,所述货叉架体241沿竖直方向移动地连接于所述框架21。为了货叉架体241的升降更为便利,货叉架体241的两侧转动地连接有若干导向轮2411,所述导向轮2411抵接于所述框架21以导引所述货叉架体241沿所述框架21移动。本实施方式中,货叉机构24包括两组多级伸缩机构242,分别设于所述货叉架体241的两侧,使得所述多级伸缩机构242朝向车辆30和电池架10伸出或者缩回以存取电池箱40。
图8是多级伸缩机构242的结构示意图,图9是多级伸缩机构242的爆炸图。如图8和图9所示,多级伸缩机构242包括驱动机构2425、基座2421、第一伸缩机构、第二伸缩机构和第三伸缩臂2424。驱动机构2425用于驱动第一伸缩机构相对基座2421移动,第一伸缩机构在移动过程中带动第二伸缩机构移动,第二伸缩机构在移动过程中带动第三伸缩臂2424移动,实现伸缩操作。
图10是基座2421和驱动机构2425的结构示意图。如图10所示,驱动机构2425用于提供动力,驱动其他机构或部件的移动。本实施方式中,所述驱动机构2425包括驱动电机24253、一对驱动轮24252和驱动链24251。驱动电机24253固定安装于基座2421。基座2421可以是长条状结构,沿伸缩方向延伸。所述一对驱动轮24252转动地连接于所述基座2421,为获得最大行程,可以将一对驱动轮24252分别设置在基座2421的两端部,其中,至少一个驱动轮24252连接于驱动电机24253,以在驱动电机24253的带动下转动。驱动链24251绕过所述一对驱动轮24252,沿所述伸缩方向延伸,所述驱动链24251于驱动连接点24211连接于所述第一伸缩臂2422以带动所述第一伸缩臂2422沿所述基座2421移动,此时,第一伸缩臂2422的移动行程等于驱动连接点24211的移动行程,即一对驱动轮24252之间的距离。本实施方式中,驱动轮24252可以链轮,驱动链24251可以是链条,驱动轮24252可以是同步轮,驱动链24251也可以是同步带。图8和图10示出的驱动机构2425采用链条和链轮结构驱动第一伸缩臂2422,本领域技术人员理解,显然,驱动机构2425还可以采用其他方式来驱动第一伸缩臂2422移动,例如可以通过电机驱动齿轮直接驱动第一伸缩臂2422,还可以通过直线电机、伸缩气缸、液压缸等方式驱动第一伸缩臂2422移动,驱动机构2425包括但不限于上述的链轮-链条结构。
图11是第一伸缩机构的结构示意图。如图9和图11所示,第一伸缩机构包括第一伸缩臂2422、第一传动链24221和一对第一传动轮24222。所述第一伸缩臂2422大体呈长条状,沿伸缩方向通过滑轨-滑块结构移动地连接于所述基座2421,使得第一伸缩臂2422可以沿基座2421的长度方向(即伸缩方向)来回移动。所述一对第一传动轮24222转动地连接于所述第一伸缩臂2422。本实施方式中,第一传动轮24222为链轮,转动地连接于第一伸缩臂2422的中部,使得第一传动轮24222从第一伸缩臂2422的两侧面至少部分伸出。所述第一传动链24221为链条,绕过所述一对第一传动轮24222并沿所述第一伸缩臂2422的伸缩方向延伸,形成位于所述一对第一传动轮24222之间的第一连接部和第二连接部,其中,第一连接部位于第一伸缩臂2422的朝向基座2421的侧面,第二连接部位于第一伸缩臂2422的朝向第二伸缩机构的侧面。所述第一传动链24221的第一连接部于第一连接点24223连接于所述基座2421,第二连接部于第二连接点24224连接于所述第二伸缩机构的第二伸缩臂2423(见图9和图14)。
所述驱动机构2425的驱动链24251于驱动连接点24211(在图8示出)连接于所述第一伸缩臂2422。这样,在所述驱动机构2425的驱动电机24253通过驱动轮24252驱动驱动链24251沿伸缩方向移动时,驱动链24251通过驱动连接点24211驱动所述第一伸缩臂2422沿所述基座2421移动。同时,在第一伸缩臂2422相对基座2421移动时,由于第一传动链24221通过第一连接点24223连接于基座2421,使得所述基座2421牵引所述第一传动链24221的第一连接部正向移动,相对的,第一传动链24221的第二连接部则反向移动(即,与第一连接部的移动方向相反)。而由于第一传动链24221的第二连接部于第二连接点24224连接于第二伸缩机构的第二伸缩臂2423,使得所述第一传动链24221的第二连接部反向牵引所述第二伸缩臂2423沿所述第一伸缩臂2422移动方向相同的方向移动。
图12是第二伸缩机构的结构示意图(朝向第一伸缩臂2422),图13是第二伸缩机构的结构示意图(远离第一伸缩臂2422)。如图9、12和图13所示,第二伸缩机构包括第二伸缩臂2423、第二传动链24231和一对第二传动轮24232。与第一伸缩机构类似,所述第二伸缩臂2423大体呈长条状,沿伸缩方向通过滑轨-滑块结构移动地连接于所述第一伸缩臂2422,使得第二伸缩臂2423也可以沿第一伸缩臂2422的长度方向(即伸缩方向)来回移动。所述一对第二传动轮24232转动地连接于所述第二伸缩臂2423。本实施方式中,第二传动轮24232为链轮,转动地连接于第二伸缩臂2423的中部,使得第二传动轮24232从第二伸缩臂2423的两侧面至少部分伸出。所述第二传动链24231绕过所述一对第二传动轮24232并沿所述第二伸缩臂2423的伸缩方向延伸,形成位于所述一对第二传动轮24232之间的第三连接部和第四连接部,其中,第三连接部位于第二伸缩臂2423的朝向第一伸缩臂2422的侧面,第四连接部位于第二伸缩臂2423的朝向第三伸缩臂2424的侧面。所述第二传动链24231的第三连接部于第三连接点24233连接于所述第二伸缩臂2423,第四连接部于第四连接点24234连接于所述第三伸缩臂2424(见图8和图9)。
图14是第二伸缩臂2423、第一传动链24221和基座2421的结构示意图。如图14所示,为了更清楚地描述第一传动链24221与第一伸缩臂2422和第二伸缩臂2423的连接关系,图14中省略了第二伸缩臂2423和第二传动轮24232。所述第一传动链24221为闭环并沿伸缩方向延伸,形成第一连接部和第二连接部,其中,第一连接部靠近于基座2421,第二连接部靠近于第二伸缩臂2423。所述第一传动链24221的第一连接部于第一连接点24223连接于所述基座2421,第二连接部于第二连接点24224连接于所述第二伸缩臂2423。在第一驱动链24251以速度v驱动第一伸缩臂2422相对基座2421伸缩时,则第二连接部以2v的速度相对第一连接部移动,第二连接部以正向速度2v带动第二伸缩臂2423移动,此时,相对基座2421而言,第一伸缩臂2422的移动速度为v,第二伸缩臂2423的移动速度为2v。
第二伸缩机构的第二传动链24231与第一传动链24221的连接结构类似,不同之处在于,第二传动链24231的第三连接部靠近第一伸缩臂2422,第四连接部靠近第三伸缩臂2424。在第一伸缩臂2422相对基座2421伸缩时,带动第二传动链24231移动。同样,第四连接部以2倍速相对第三连接部移动,即,第四连接部以相对于第一伸缩臂2422正向速度2v带动第三伸缩臂2424移动,此时,相对基座2421而言,第一伸缩臂2422的移动速度为v,第二伸缩臂2423的移动速度为2v,第三伸缩臂2424的速度为3v(因第一伸缩臂2422的速度为v,且第三伸缩臂2424与第一伸缩臂2422同向),此处不再赘述。
本领域技术人员知悉,对于第一伸缩臂2422、第二伸缩臂2423和第三伸缩臂2424而言,连接点的位置决定其向两端的伸缩行程。如果在收回状态下,连接点设置在移动行程的中点位置,则两端的伸缩行程相同,如果连接点设置在靠近移动行程的端部位置,则连接点所在的端的伸缩行程小于另外一端的伸缩行程。
具体而言,在第一伸缩臂2422处于收回状态下,如果驱动连接点24211设为两个驱动轮24252的中点(即驱动链24251一侧的中点),则第一伸缩臂2422向两端的伸缩行程相同。如果驱动连接点24211设置在图8示出的左端,即,所述驱动连接点24211位于所述第一伸缩臂2422的移动行程的端部,此时,所述第一伸缩臂2422的驱动连接点24211所在的端部的伸缩行程小于另外一端部的伸缩行程,即第一伸缩臂2422向左端的伸缩行程小于向右端的伸缩行程。同理,在第二伸缩臂2423处于收回状态下,如果连接第二伸缩臂2423的第二连接点24224位于第一传动轮24222的中点位置(即第一传动链24221的第二连接部的中点位置),则第二伸缩臂2423向两端的伸缩行程相同。如果第二连接点24224设置在图11示出的左端,则第二伸缩臂2423向左端的伸缩行程小于向右端的伸缩行程。在第三伸缩臂2424处于收回状态下,如果连接第三伸缩臂2424的第四连接点24234位于第二传动轮24232的中点位置(即第二传动链24231的第四连接部的中点位置),则第三伸缩臂2424向两端的伸缩行程相同,如果第四连接点24234设置在图13示出的左端,则第三伸缩臂2424向左端的伸缩行程小于向右端的伸缩行程。
因此,在实际应用中,可以根据换电机器人20对车辆30和对电池架10的伸缩行程确定驱动连接点24211、第二连接点24224和第四连接点24234的位置,根据需要设置换电机器人20对车辆30和对电池架10的最大伸缩行程。例如,如果换电机器人20对车辆30的伸缩行程小于对电池架10的伸缩行程,则可以将驱动连接点24211、第二连接点24224和第四连接点24234的位置来设置伸缩行程,使得第一伸缩臂2422、第二伸缩臂2423和第三伸缩臂2424对车辆30的伸缩行程小于对电池架10的伸缩行程,实现非对称式伸缩操作。
图15是第三伸缩臂2424的结构示意图。如图15所示,第三伸缩臂2424通过滑块-滑轨结构移动地连接于第二伸缩臂2423,并且于第四连接点24234连接于第二传动链24231的第二连接部,在第二传动链24231移动时带动第三伸缩臂2424沿第二伸缩臂2423移动。本实施方式中,第三伸缩臂2424还设有导向柱24241,用于在存取电池箱40的过程中插入电池箱40的导向套42内,从而便于移动电池箱40。
以下详细描述上述换电系统的工作过程。
在需要对车辆30更换电池时,换电机器人20的行走机构23行走至预设位置,提升机构22将货叉机构24移动至预设高度。
货叉机构24的驱动机构2425的驱动电机24253驱动驱动链24251沿伸缩方向移动,带动第一伸缩臂2422沿所述基座2421移动朝向车辆30伸出。同时,在第一伸缩臂2422相对基座2421移动时,第一传动链24221在基座2421的牵引下移动,带动第二伸缩臂2423沿所述第一伸缩臂2422以2倍于基座2421的速度朝向车辆30伸出。在第二伸缩臂2423相对第一伸缩臂2422移动过程中,第二传动链24231在第一伸缩臂2422的牵引下移动,带动第三伸缩臂2424以2倍于第一伸缩臂2422的速度朝向车辆30伸出,直至第三伸缩臂2424的导向柱24241位于电池箱40的导向套42的下方。
接着,提升机构22带动货叉机构24上升,使得第三伸缩臂2424插入电池箱40的导向套42,并托起电池箱40,货叉机构24的多级伸缩机构242反向移动,将电池箱40移动至货叉架体241内。然后,行走机构23和提升机构22移动货叉机构24至预设位置,将电池箱40放入电池架10内充电。
接着,所述换电机器人20通过多级伸缩机构242将所述电池架10内充满电的电池箱40通过多级伸缩机构242移动至货叉架体241内,然后以相同方式将电池箱40送入车辆30,完成对车辆30的换电过程。
上述的多级伸缩机构242、换电机器人20和换电系统可以通过驱动机构2425驱动第一伸缩机构的第一伸缩臂2422相对基座2421沿伸缩方向移动,在第一伸缩臂2422移动过程中,第一传动链24221在基座2421的牵引下绕第一传动轮24222移动,带动第二伸缩臂2423相对第一伸缩臂2422沿伸缩方向移动,从而可以实现替代人工存取电池的功能。
进一步,上述的多级伸缩机构242可以沿伸缩方向向两端伸缩,通过设置第一连接点24223和第二连接点24224的位置,可以设置多级伸缩机构242向两端伸出的最大行程,尤其适合为新能源车辆30更换电池箱40时,对车辆30存取电池箱40的行程与对电池架10存取电池箱40的行程不一致的情况,可以根据需要设置上述的多级伸缩机构242朝向车辆30的伸缩行程和朝向电池架10的伸缩行程,实现非对称式存取电池箱40。
以上实施方式只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人了解本发明的内容并加以实施,并不能以此限制本发明的保护范围,凡根据本发明精神实质所做的等效变化或修饰,都应涵盖在本发明的保护范围内。
- 换电设备解锁装置、换电设备及电池箱快速换电系统
- 一种无感换电的智能换电柜、系统及换电方法