车辆行驶控制系统、车辆、以及车辆行驶控制方法
文献发布时间:2023-06-19 11:40:48
技术领域
本公开涉及一种用于车辆的行驶控制系统、车辆、以及用于车辆的行驶控制方法,并且更具体地,涉及一种用于配备有电池的车辆的行驶控制。
背景技术
近年来,诸如混合动力车辆和电动汽车的配备有电池的车辆已被广泛使用。在下文中,这些车辆也被称为“电动车辆”。典型的电动车辆设置有按功能分开的多个电子控制单元(ECU)。例如,日本特开平2019-156007号公报(JP 2019-156007A)中所公开的混合动力车辆包括发动机ECU、电动机ECU、电池ECU和混合动力车辆(HV)ECU。HV ECU经由通信端口连接到发动机ECU、电动机ECU和电池ECU,并且将各种控制信号和数据发送到发动机ECU、电动机ECU和电池ECU以及从其接收各种控制信号和数据。
发明内容
在下文中,假设一种配置,即电池组和行驶控制系统安装在电动车辆上。电池组包括电池、检测对电池进行充电和从电池进行放电的电流的电流传感器、以及监测电池的状态的ECU(在下文中被称为第一ECU)。行驶控制系统包括:旋转电机(电动机发电机),该旋转电机能够消耗电力以产生驱动力以及产生电力;功率转换装置(逆变器等),该功率转换装置电连接在电池和旋转电机之间;以及控制功率转换装置的ECU(在下文中被称为第二ECU)。第一ECU和第二ECU被配置为能够互相通信。
汽车工业被认为具有纵向一体化的工业结构。然而,在未来,随着电动车辆在世界范围内的进一步推广,关于电动车辆的横向分工有可能取得进展。
可想而知,处理电池组的业务实体(以下称为公司A)和处理行驶控制系统的业务实体(下文称为公司B)单独操作。例如,公司B向公司A销售行驶控制系统。公司A通过将从公司B购买的行驶控制系统与由公司A所设计的电池组结合,来开发电动车辆。特别是在这种情况下,电池组和行驶控制系统之间的兼容性可能成为问题。
更具体地,公司A已在基于二次电池的研发领域中的惯用手段的“基于电流的”电池的保护和使用方面积累了经验。另一方面,公司B熟悉电池的充电/放电的“基于功率的”控制,这适用于控制诸如逆变器等功率转换装置。在这种情况下,何种参数用于电池组中的第一ECU和行驶控制系统中的第二ECU之间的通信可能变成问题。
具体地,可想而知,实际上对电池进行充电和从电池进行放电的电流(电流传感器的检测值)以及作为从保护电池的角度来看允许对电池进行充电和从电池进行放电的电流的“可容许电流”从第一ECU输出到第二ECU。希望第二ECU基于从第一ECU接收到的可容许电流而不是根据基于功率的参数(稍后将描述的功率极限值Win和Wout)来控制功率转换装置。
本公开能够确保两个ECU之间的兼容性。
根据本公开的方面的行驶控制系统是用于包括电池组的车辆的行驶控制系统。电池组包括电池、被配置为检测对电池进行充电和从电池进行放电的电流的电流传感器、以及监测电池的状态的第一控制装置。行驶控制系统包括旋转电机、功率转换装置和第二控制装置。旋转电机被配置为消耗电力以产生驱动力,并且被配置为产生电力。功率转换装置电连接在电池和旋转电机之间。第二控制装置具有指示允许对电池进行充电和从电池进行放电的电力的功率极限值,其被配置为:当电流传感器的检测值超过控制阈值时执行电流反馈控制,以基于检测值超过控制阈值的量来校正功率极限值,并且被配置为控制功率转换装置。第二控制装置被配置为:从第一控制装置接收电池的可容许电流,并且使用可容许电流作为控制阈值来执行电流反馈控制。可容许电流被确定以保护电池。
根据上述配置,第二控制装置被配置为当电流传感器的检测值超过控制阈值时执行电流反馈控制,以基于检测值超过控制阈值的量来校正电池的功率极限值(稍后将描述的放电功率极限值Wout)。作为控制阈值,使用从第一控制装置输出到第二控制装置的可容许电流。因此,即使当基于功率的信息(功率极限值)未从第一控制装置输出到第二控制装置时,第二控制装置也可以执行电流反馈控制并且适当限制功率极限值。因此,可以确保两个控制装置(第一控制装置和第二控制装置)之间的兼容性。
在上述方面中,第二控制装置可以被配置为使用通过从可容许电流减去预定裕度而获得的值作为控制阈值来执行电流反馈控制。
在上面的配置中,使用通过从可容许电流减去裕度而获得的值作为控制阈值。即,第二控制装置被配置为:当电流传感器的检测值达到通过从可容许电流减去裕度而获得的值时,开始校正功率极限值。这会抑制电池的充电/放电电流,使其不会极大地超过可容许电流。因此,根据上述配置,可以更有效地保护电池。
在上述方面中,第二控制装置可以被配置为:使用被确定以保护电连接在电池和功率转换装置之间的电气组件的上限电流以及来自第一控制装置的可容许电流中的更小的一个作为控制阈值,来执行电流反馈控制。
根据上述配置,可以利用上限电流来保护电气组件(诸如稍后将描述的示例中的线束),以及利用可容许电流来保护电池。
根据本公开的第二方面的车辆包括行驶控制系统、电池、电流传感器和第一控制装置。
根据上面的配置,可以确保两个控制装置之间的兼容性。
本公开的第三方面涉及一种车辆的行驶控制方法。车辆包括电池组和行驶控制系统。电池组包括电池、配置为检测对电池进行充电和从电池进行放电的电流的电流传感器、以及监测电池的状态的第一控制装置。行驶控制系统包括:旋转电机,该旋转电机被配置为消耗电力以产生驱动力并且被配置为产生电力;功率转换装置,该功率转换装置电连接在电池和旋转电机之间;以及控制功率转换装置的第二控制装置。行驶控制方法包括:将电池的可容许电流从第一控制装置输出到第二控制装置,可容许电流被确定以保护电池;以及利用第二控制装置,使用可容许电流作为控制阈值来执行电流反馈控制。电流反馈控制是:当电流传感器的检测值超过控制阈值时,进行控制以基于检测值超过控制阈值的量来校正功率极限值,功率极限值指示允许对电池进行充电和从电池进行放电的电力。
根据上面的配置,可以确保两个控制装置之间的兼容性。
根据本公开,可以确保两个控制装置之间的兼容性。
附图说明
下面将参照附图描述本发明的示例性实施例的特征、优点以及技术和工业意义,在附图中,相同的符号表示相同的元件,以及其中:
图1是示意性地示出了本实施例中的车辆的总体配置的示意图;
图2是本实施例中与电流反馈控制有关的混合动力车辆(HV)ECU的功能框图;
图3是示出了本实施例中在电流反馈控制之前执行的处理过程的流程图;
图4是第一修改中与电流反馈控制有关的HV ECU的功能框图;
图5是示出了第一修改中在电流反馈控制之前执行的处理过程的流程图;
图6示出了电池的电流和可容许放电电流的时间变化的示例;以及
图7是示出了第二修改中在电流反馈控制之前执行的处理过程的流程图。
具体实施方式
本公开的实施例将参照附图进行详细描述。应当注意,附图中相同或相应的部分用相同的参考字符表示,并且将省略其重复的描述。
在下文中,将描述根据本公开的行驶控制系统安装在混合动力车辆上的配置作为示例。然而,根据本公开的行驶控制系统可以安装在其他类型的电动车辆(电动汽车、燃料单体车辆等)上。
实施例
车辆总体配置
图1是示意性地示出了本实施例中的车辆的总体配置的示意图。参照图1,车辆9是混合动力车辆,并且包括电池组1和混合动力车辆(HV)系统2。HV系统2可以被视为根据本公开的“行驶控制系统”。
电池组1包括电池10、电池传感器组20、系统主继电器(SMR)30和电池电子控制单元(ECU)40。HV系统2包括功率控制单元(PCU)50、第一电动机发电机(MG)61、第二电动机发电机62、发动机70、功率分配装置81、驱动轴82、驱动轮83、加速器位置传感器91、车辆速度传感器92和HV ECU 100。
电池10包括由多个电池单体构成的组合电池。每个单体是二次电池,诸如锂离子电池或镍氢电池。电池10存储用于驱动第一电动机发电机61和第二电动机发电机62的电力,并且通过PCU 50向第一电动机发电机61和第二电动机发电机62供应电力。进一步地,当第一电动机发电机61和第二电动机发电机62产生电力时,电池10通过PCU50接收产生的电力而被充电。
电池传感器组20包括电压传感器21、电流传感器22和温度传感器23。电压传感器21检测包括在电池10中的每个单体的电压VB。电流传感器22检测对电池10进行充电和从电池10进行放电的电流IB。温度传感器23检测电池10的温度TB。传感器将检测结果输出到电池ECU 40。
SMR 30电连接到电源线,该电源线连接电池10和PCU 50。根据来自HV ECU 100的控制命令,SMR 30切换PCU 50和电池10之间的电连接和断连。
电池ECU 40包括诸如中央处理单元(CPU)的处理器41、诸如只读存储器(ROM)和随机存取存储器(RAM)的存储器42和用于输入/输出各种信号的输入/输出端口(未示出)。电池ECU 40基于从电池传感器组20的传感器接收到的信号以及存储在存储器42中的程序和映射来监测电池10的状态。
由电池ECU 40执行的主要处理包括电池10的可容许充电电流Ipin和可容许放电电流Ipd的计算处理。从保护电池10的角度来看,电池10的可容许充电电流Ipin是允许对电池10进行充电的最大电流。同样,从保护电池10的角度来看,电池10的可容许放电电流Ipd是允许从电池10进行放电的最大电流。电池ECU 40将所计算的可容许充电电流Ipin和所计算的可容许放电电流Ipd输出到HV ECU 100。要注意,可容许充电电流Ipin和可容许放电电流Ipd中的任何一个或两个都可以被视为根据本公开的“可容许电流”。
根据来自HV ECU 100的控制命令,PCU 50在电池10与第一电动机发电机61和第二电动机发电机62之间或在第一电动机发电机61与第二电动机发电机62之间执行双向功率转换。PCU 50被配置为能够单独地控制第一电动机发电机61和第二电动机发电机62的状态。更具体地,例如,PCU 50包括与第一电动机发电机61和第二电动机发电机62对应地设置的两个逆变器(未示出)以及将供应给每个逆变器的直流(DC)电压提升到电池10的输出电压或更高的转换器(未示出)。因此,例如,PCU 50可以使第二电动机发电机62进入功率运行状态,同时使第一电动机发电机61进入再生状态(发电状态)。
PCU 50可以被视为根据本公开的“功率转换装置”。然而,当车辆9被配置为能够进行用于利用从外部供应的电力对电池10进行充电的外部充电时(例如,当车辆是插入式混合动力车辆时),根据本公开的“功率转换装置”可以是充电器,该充电器将来自车辆外部的电力转换为电池10的充电功率。
第一电动机发电机61和第二电动机发电机62中的每一个都是交流(AC)旋转电机,例如三相AC同步电动机,在该三相AC同步电动机中,永磁铁嵌入转子。第一电动机发电机61和第二电动机发电机62中的至少一个可以被视为根据本公开的“旋转电机”。
第一电动机发电机61主要用作由发动机70通过功率分配装置81驱动的发电机。第一电动机发电机61所产生的电力经由PCU 50供应给第二电动机发电机62或电池10。第一电动机发电机61也可以用曲轴转动发动机70。
第二电动机发电机62主要作为电动机操作,并且驱动驱动轮83。通过接收来自电池10的电力和由第一电动机发电机61产生的电力中的至少一个,第二电动机发电机62被驱动,并且将第二电动机发电机62的驱动力传递到驱动轴(输出轴)72。另一方面,当在下降的斜坡上车辆刹车或加速度减小时,第二电动机发电机62作为发电机操作,以执行再生发电。经由PCU 50向电池10供应由第二电动机发电机62产生的电力。
发动机70通过将空气和燃料的混合物燃烧时所产生的燃烧能转换成诸如活塞或转子的运动元件的动能来输出功率。
例如,功率分配装置81是行星齿轮装置。虽然未示出,但是功率分配装置81包括太阳齿轮、环形齿轮、小齿轮和齿轮架。齿轮架连接到发动机70。太阳齿轮连接到第一电动机发电机61。环形齿轮经由驱动轴82连接到第二电动机发电机62和驱动轮83。小齿轮与太阳齿轮和环形齿轮啮合。齿轮架承载小齿轮,使得小齿轮能够旋转和转动。
加速器位置传感器91检测通过用户对加速器踏板(未示出)的压下量,作为加速器操作量ACC,并且将检测结果输出到HV ECU 100。车辆速度传感器92检测驱动轴82的旋转速度,作为车辆速度V,并且将检测结果输出到HV ECU 100。
与电池ECU 40类似,HV ECU 100包括诸如CPU的处理器101、诸如ROM和RAM的存储器102和输入/输出端口(未示出)。HV ECU100基于来自电池ECU 40的数据以及存储在存储器102中的程序和映射执行车辆9的行驶控制。稍后将描述控制的细节。
电池ECU 40可以被视为根据本公开的“第一控制装置”。HV ECU100可以被视为根据本公开的“第二控制装置”。HV ECU 100可以按功能被进一步划分成多个ECU(发动机ECU、MG ECU等),如JP2019-156007A中所述。
ECU之间的通信
汽车工业被认为具有纵向一体化的工业结构。然而,在未来,随着电动车辆在世界范围内的进一步推广,关于电动车辆的横向分工有可能取得进展。本公开的发明人关注的一点是,当产业结构的这种转变进展时,可能发生以下问题。
可想而知,处理电池组1的业务实体(以下称为公司A)和处理HV系统2的业务实体(下文称为公司B)单独操作。例如,公司B向公司A销售HV系统2。公司A通过将从公司B购买的HV系统2与由公司A所设计(或取得)的电池组1结合,来开发车辆9。特别是在这种情况下,电池组1和HV系统2之间的兼容性可能成为问题。
更具体地,公司A已在基于二次电池的研发领域中的惯用手段的基于电流的电池10的保护和使用方面积累了经验。另一方面,公司B熟悉电池10的充电/放电的基于功率的控制,这适用于控制PCU 50。公司B使用作为电池10的充电功率的控制上限值的充电功率控制上限值Win和作为电池10的放电功率的控制上限值的放电功率极限值Wout,来进行电池10的充电/放电控制。在这种情况下,HV ECU 100只需要能够从电池ECU 40接收电池10的充电功率控制上限值Win和放电功率极限值Wout。然而,公司A不熟悉将充电功率控制上限值Win和放电功率极限值Wout从电池ECU 40输出的技术。因此,何种参数应被用于电池ECU 40和HV ECU 100之间的通信(执行基于电流的通信和基于功率的通信中的哪一种)可能成为问题。
在本实施例中,假设基于电流的通信是基于公司A的意图执行的,其中公司B向公司A销售HV系统2。具体地,如上所述,电池ECU 40将被允许对电池10进行充电和从电池10进行放电的可容许充电电流Ipin和可容许放电电流Ipd输出到HV ECU 100,以保护电池10。HVECU 100基于从电池ECU 40接收到的可容许充电电流Ipin和可容许放电电流Ipd对PCU 50执行反馈控制。这种控制被称为“电流反馈控制”并且将进行详细描述。
对电池10进行充电时的电流反馈控制和对电池10进行放电时的电流反馈控制基本上是相同的。因此,在下面,将代表性地描述基于对电池10进行放电时的可容许放电电流Ipd的电流反馈控制。关于电池10的充电/放电方向(电流和功率的符号),正方向被定义为放电方向,并且负方向被定义为充电方向。
电流反馈控制
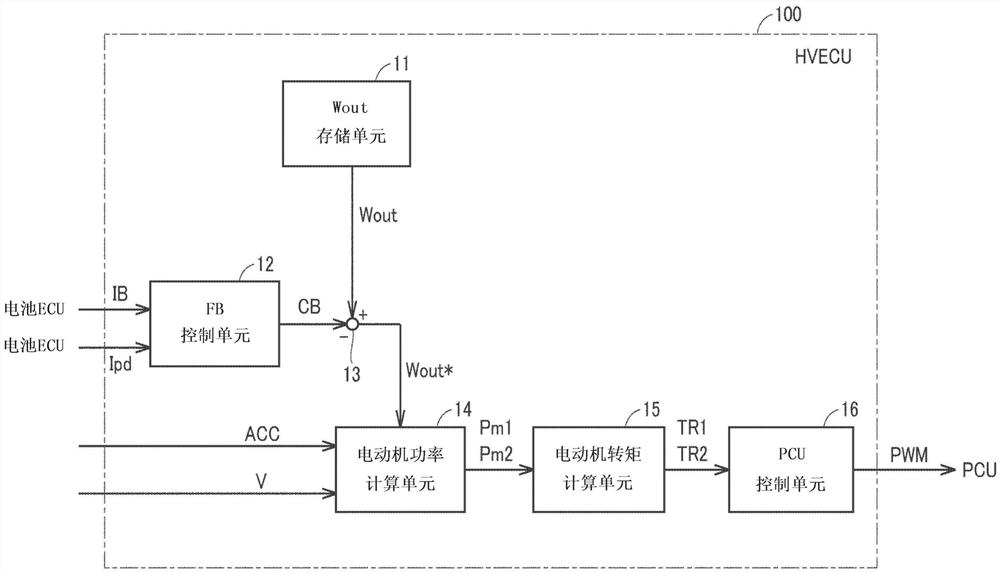
图2是本实施例中与电流反馈控制有关的HV ECU 100的功能框图。参照图2,HVECU 100包括Wout存储单元11、反馈控制单元12、减法单元13、电动机功率计算单元14、电动机转矩计算单元15和PCU控制单元16。
Wout存储单元11存储放电功率极限值Wout。来自电池10的放电功率被限制为不超过放电功率极限值Wout。放电功率极限值Wout可以是固定值或可以是根据电池10的充电状态(SOC)和/或温度TB计算的变量值。Wout存储单元11将电池10的放电功率极限值Wout输出到减法单元13。
反馈控制单元12以规定的周期(例如几百毫秒)从电池ECU 40接收电流IB的检测值。电池ECU 40可以对来自电流传感器22的信号(检测值)执行平滑处理(逐步变化处理),并且将平滑处理之后的值输出到反馈控制单元12。例如,平滑处理是利用预定时间常数对电流传感器22的检测值求平均的处理。
反馈控制单元12被配置为执行电流反馈控制,以控制电流使得在电流IB的检测值超过控制阈值TH时使电流IB低于控制阈值TH。除了电流IB的检测值,反馈控制单元12还从电池ECU 40接收电池10的可容许放电电流Ipd。然后,反馈控制单元12将可容许放电电流Ipd代入控制阈值TH,并且执行电流反馈控制。将电流反馈控制的计算结果输出到减法单元13,作为用于校正电池10的放电功率极限值Wout的控制量CB。
减法单元13从放电功率极限值Wout减去从反馈控制单元12输出的控制量CB,并且将计算结果输出到电动机功率计算单元14,作为放电功率极限值Wout的校正值Wout*(Wout*=Wout-CB)。
电动机功率计算单元14接收来自加速器位置传感器91的加速器操作量ACC和来自车辆速度传感器92的车辆速度V。基于加速器操作量ACC、车辆速度V等,电动机功率计算单元14计算第一电动机发电机61所需的电动机功率Pm1和第二电动机发电机62所需的电动机功率Pm2。当电动机功率Pm1、Pm2的总值(Pm1+Pm2)超过校正值Wout*时,总值(Pm1+Pm2)被限制到校正值Wout*。
电动机转矩计算单元15基于来自电动机功率计算单元14的电动机功率Pm1计算指示第一电动机发电机61所需的转矩的转矩命令值TR1。进一步地,电动机转矩计算单元15基于来自电动机功率计算单元14的电动机功率Pm2计算指示第二电动机发电机62所需的转矩的转矩命令值TR2。进一步地,PCU控制单元16产生脉冲宽度调制(PWM)信号,其用于分别使得第一电动机发电机61和第二电动机发电机62根据转矩命令值TR1、TR2输出转矩。然后,电动机转矩计算单元15将产生的PWM信号输出到PCU 50。
处理流程
图3是示出了本实施例中在电流反馈控制之前执行的处理过程的流程图。图3中的流程图以及图5和图7中的流程图所示的处理(稍后将描述)分别从主例程(未示出)调用,并且例如每预定控制周期执行。在这些流程图中包括的每个步骤都基本上由HV ECU 100通过软件处理实施,但是可以由设置在HV ECU 100中的专用硬件(电路)实施。在下文中,术语“步骤”将被缩写为“S”。
参照图3,在S11中,HV ECU 100经由电池ECU 40从电流传感器22获取电流IB的检测值。
在S12中,HV ECU 100从电池ECU 40获取电池10的可容许放电电流Ipd,该可容许放电电流Ipd被确定以保护电池10。根据电池10的温度TB和电池10的劣化状态确定可容许放电电流Ipd,以便保护电池10。在这里,电池10的劣化可以包括电池10的老化。此外,当电池10是锂离子电池时,电池10的劣化可以包括锂金属沉积在锂离子电池的负电极表面上(所谓的锂沉积)的劣化。
在S13中,HV ECU 100将可容许放电电流Ipd设置为用于电流反馈控制的控制阈值TH(TH=Ipd)。
在S14中,HV ECU 100设置电流反馈控制的控制增益G。例如,HV ECU 100将控制增益G设置成预定值。然后,HV ECU 100使用在S13和S14中设置的控制阈值TH和控制增益G来执行电流反馈控制(S15)。具体地,当电流IB超过控制阈值TH时,HV ECU 100使用通过从电流IB减去控制阈值TH而获得的值作为控制输入(控制量CB)并且使用预定值作为控制增益G,来执行反馈控制(例如比例积分(PI)控制)。
如上所述,在本实施例中,HV ECU 100不从电池ECU 40接收电池10的放电功率极限值Wout。当电流传感器22的检测值(电流IB)超过控制阈值TH时,HV ECU 100执行电流反馈控制,以基于检测值超过控制阈值TH的量来校正电池10的放电功率极限值Wout。使用从电池ECU 40输出到HV ECU 100的可容许放电电流Ipd作为控制阈值TH。因此,HV ECU 100可以执行电流限制,使得即使当基于功率的信息(放电功率极限值Wout)不从电池ECU 40输出到HV ECU 100时,电流IB也不极大地超过控制阈值TH。
第一修改
在本修改中,将描述对实现电池10的保护和电池10之外的电气组件的保护两者的控制。在第一修改中,使用HV ECU 100A,而不是HV ECU 100。
图4是第一修改中与电流反馈控制有关的HV ECU 100A的功能框图。参照图4,HVECU 100A与根据实施例的HV ECU 100(参照图2)的不同在于进一步包括上限电流存储单元17。
上限电流存储单元17存储“上限电流Iu”,其是从保护电连接在电池10和PCU 50之间的电气组件的角度确定的电流。上限电流Iu是基于线束的额定电流、设置在电池10中的保险丝的额定电流等提前确定的。然而,与上限电流Iu有关的电气组件并不限于这些示例,而是例如可以是构成PCU 50内部的转换器的二极管(与开关元件反平行连接的装置)。上限电流存储单元17将上限电流Iu输出到反馈控制单元12。
类似于实施例,当电流IB的检测值超过控制阈值TH时,反馈控制单元12执行电流反馈控制,其控制电流使得电流IB不超过控制阈值TH。然而,在第一修改中,反馈控制单元12不仅接收来自电池ECU40的电池10的可容许放电电流Ipd,而且接收来自上限电流存储单元17的上限电流Iu。反馈控制单元12将可容许放电电流Ipd和上限电流Iu中的更小的一个代入控制阈值TH,并且执行电流反馈控制。将电流反馈控制的计算结果输出到减法单元13,作为用于校正电池10的放电功率极限值Wout的控制量CB。
图5是示出了第一修改中在电流反馈控制之前执行的处理过程的流程图。参照图5,HV ECU 100A首先从电流传感器22获取电流IB的检测值(S21)。在S22中,HV ECU 100A从电池ECU 40获取电池10的可容许放电电流Ipd,该可容许放电电流Ipd被确定以保护电池10。
在S23中,HV ECU 100A从存储器102读取针对保护电气组件而被确定的上限电流Iu。如上所述,上限电流Iu是针对保护线束、保险丝、二极管等而提前确定的固定值。
在S24中,HV ECU 100A将可容许放电电流Ipd与上限电流Iu进行比较,并且确定可容许放大电流Ipd是否小于上限电流Iu。当可容许放电电流Ipd小于上限电流Iu(S24中为是)时,HV ECU 100A将处理进行到S25,并且将可容许放电电流Ipd设置成用于电流反馈控制的控制阈值TH(TH=Ipd)。另一方面,当上限电流Iu等于或小于可容许放电电流Ipd(S24中为否)时,HV ECU 100A将处理进行到S26,并且将上限电流Iu设置成控制阈值TH(TH=Iu)。
S27和S28的后续处理与实施例中的S14和S15(参照图3)的处理相似,因此将省略其详细描述。
如上所述,在第一修改中,类似于实施例,也可以执行电流限制,使得即使当放电功率极限值Wout未从电池ECU 40输出到HV ECU100A时,电流IB也不极大地超过控制阈值TH。在第一修改中,使用用于保护电池10的可容许放电电流Ipd和用于保护电气组件的提前确定的上限电流Iu中的更小的一个作为控制阈值TH。因此,电池10和电气组件两者都可以被适当保护。
第二修改
在电流反馈控制中,控制增益G设置得越高,反馈作用越强,并且电流IB超过控制阈值TH越少。另一方面,当将控制增益G设置成太高的值时,电流限制变得相当严格,并且车辆9的行驶-性能可能会劣化。当控制增益G设置得不够高时,反馈作用很弱,并且电流IB可以在相对很大的程度上超过控制阈值TH(过冲)。在第二修改中,将描述一种配置示例,在该配置示例中,添加了针对电流IB的过冲的措施。在第二修改中,使用HV ECU 100B,而不是HVECU 100。
图6示出了电池10的电流IB和可容许放电电流Ipd的时间变化。在图6中,水平轴表示流逝的时间,并且垂直轴表示电流。
参照图6,在第二修改中,为可容许放电电流Ipd提供裕度α。提前确定裕度α,并且将其存储在HV ECU 100B的存储器102中。例如,裕度α可以设置成可容许放电电流Ipd的约1/10。当在时间t1电流IB达到比可容许放电电流Ipd小裕度α的值(Ipd-α)时,开始校正放电功率极限值Wout。这可以抑制电流IB超过可容许放电电流Ipd的状态发生,并且消除电流IB在短时间内超过可容许放电电流Ipd的状态。
图7是示出了第二修改中在电流反馈控制之前执行的处理过程的流程图。参照图7,HV ECU 100B首先从电流传感器22获取电流IB的检测值(S31)。进一步地,HV ECU 100B从电池ECU 40获取电池10的可容许放电电流Ipd(S32)。
在S33中,HV ECU 100B从存储器102中读取为可容许放电电流Ipd提供的裕度α。进一步地,在S34中,HV ECU 100B从存储器102中读取提前确定的上限电流Iu。
在S35中,HV ECU 100B将通过从可容许放电电流Ipd减去裕度α而获得的值(Ipd-α)与上限电流Iu进行比较。当差(Ipd-α)小于上限电流Iu(S35中为是)时,HV ECU 100B将(Ipd-α)设置成用于电流反馈控制的控制阈值TH(S36)。另一方面,当上限电流Iu等于或小于差(Ipd-α)(S35中为否)时,HV ECU 100B将上限电流Iu设置成控制阈值TH(S37)。
S38和S39的后续处理与实施例中的S14和S15(参照图3)的处理相似,因此将省略其描述。
如上所述,在第二修改中,类似于实施例或第一修改,也可以执行电流限制,使得即使当放电功率极限值Wout未从电池ECU 40输出到HV ECU 100B时,电流IB也在不极大地超过控制阈值TH。在第二修改中,当HV ECU 100B从电池ECU 40接收到可容许放电电流Ipd时,HV ECU 100B使用通过从可容许放大电流Ipd减去裕度α而获得的值(Ipd-α)来设置控制阈值TH。结果,当电流IB达到(Ipd-α)时,开始电流反馈控制(放电功率极限值Wout的校正)。因此,即使当控制增益G相对较低并且电流IB的过冲可能发生时,也可以抑制电流IB在极大地超过可容许放电电流Ipd。结果,根据第二修改,可以更有效地保护电池10。
本文所公开的实施例应被视为是说明性的,而且在所有方面都没有限制。本公开的范围由权利要求而不是上述实施例说明,并且旨在将所有修改都包括在与权利要求的含义和范围相同的含义和范围中。
- 车辆行驶路线控制系统、车辆行驶路线控制装置以及车辆行驶路线控制方法
- 车辆行驶控制系统、车辆、牵引系统和车辆行驶控制方法