一种用于操纵稳定性关键指标分析的方法
文献发布时间:2023-06-19 11:42:32
技术领域
本发明涉及汽车技术领域,尤其涉及一种用于操纵稳定性关键指标分析的方法。
背景技术
现有整车指标分解技术:一种方法是仅考虑轮胎特性影响利用二自由度摩托车模型进行整车横摆静力学分析,得到整车指标与轮胎特性的关系,并未考虑悬架柔度等因素;一种方法是通过建立车辆动力学模型,由于其自由度太多,模型过于复杂,虽然分析精度较高,但是复杂的输入输出关系使得车辆系统的分解综合变得难以实现,同时在正向开发中性能目标分解在项目开发初期,此时所能得到的建模参数较少,系统的具体结构参数尚未完全确定,难以进行详细建模。
发明内容
本发明提供了一种用于操纵稳定性关键指标分析的方法,该方法在底盘性能概念设计阶段,仅需少量参数即可对现有悬架K&C及轮胎特性进行快速分析评价,并又可对轮胎、悬架系统K&C特性进行调整优化,从而指导系统方案设计,解决了现有整车指标分析方法存在的上述问题。
本发明技术方案结合附图说明如下:
一种用于操纵稳定性关键指标分析的方法,将车辆的操纵稳定性关键指标等效为整车不足转向度α
所述车辆的操纵稳定性关键指标包括重量、轴回正力矩、侧倾前束、侧倾外倾、侧向力前束、侧向力外倾、回正力矩前束和回正力矩外倾。
将所述重量等效到第一前轮胎柔度α
所述整车不足转向度α
所述α
所述Y
Y
Y
Y
Y
N
N
g
g
其中,Y
公式(1)—(8)记为矩阵形式[K]×[U]=[F],求解得到1g下的前、后轴侧向力Y
本发明的有益效果为:
该方法在底盘性能概念设计阶段,仅需少量参数即可对现有悬架K&C及轮胎特性进行快速分析评价,并又可对轮胎、悬架系统K&C特性进行调整优化,从而指导系统方案设计。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
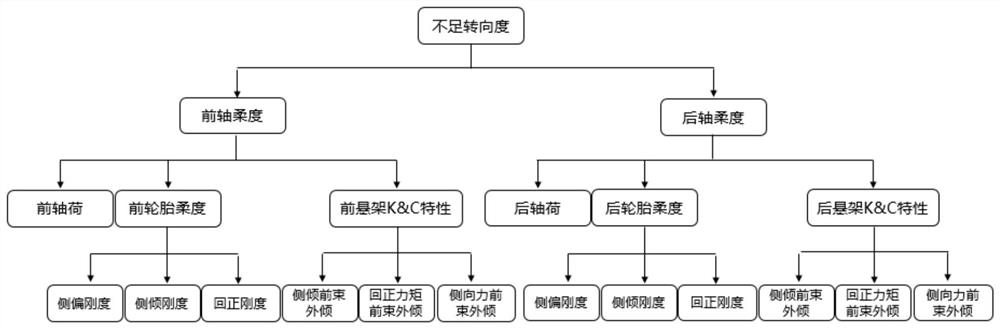
图1为不足转向指标分解示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参阅图1,一种用于操纵稳定性关键指标分析的方法,本发明考虑侧向加速度及横摆角速度运动的静态耦合效应,忽略其它自由度的惯性及阻尼,进行侧向加速度1g下的车辆横摆静力学分析。
将车辆的操纵稳定性关键指标等效为整车不足转向度α
所述车辆的操纵稳定性关键指标包括重量、轴回正力矩、侧倾前束、侧倾外倾、侧向力前束、侧向力外倾、回正力矩前束和回正力矩外倾。
将所述重量等效到第一前轮胎柔度α
所述整车不足转向度α
所述α
所述Y
Y
Y
Y
Y
N
N
g
g
其中,Y
公式(1)—(8)记为矩阵形式[K]×[U]=[F],求解得到1g下的前、后轴侧向力Y
实施例以某车型不足转向度估算及分解为例说明本发明的使用过程:
表1整车输入参数
下表是不足转向度分解指标,分为悬架K&C指标和轮胎性能指标,在不足转向度指标分解中,这些参数作为分解指标,确定优化范围,并提出系统工程目标;在不足转向度性能预测中,这些参数作为已知参数,工程估算整车不足转向度。下表中的数值来源K&C及轮胎特性的试验数据。
表2分解指标
利用上述参数,通过矩阵[K[×[U[=[F[计算得到前、后轴侧向力Y
该车型不足转向度2.58°/g,分解到包含轮胎及悬架K&C各个因素的贡献量,具体结果如下:
表3总柔度分解表
通过表3结果可看出,由本发明可将整车不足转向度指标分解至轮胎及悬架系统K&C特性指标,设定系统指标,指导设计。
以上结合附图详细描述了本发明的优选实施方式,但是,本发明的保护范围并不局限于上述实施方式中的具体细节,在本发明的技术构思范围内,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,这些简单变型均属于本发明的保护范围。
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明的思想,其同样应当视为本发明所公开的内容。
- 一种用于操纵稳定性关键指标分析的方法
- 一种用于四轮独立驱动车辆的操纵稳定性控制方法