玻璃板的成形方法
文献发布时间:2023-06-19 12:24:27
技术领域
本发明涉及玻璃板的成形方法。
背景技术
可以采用各种对收容在成形模内的玻璃材料进行加热使其软化并进行冲压来制造玻璃制的冲压成形品的方法。例如,提出有将板状的玻璃材料依次向设置在腔室内的加热、冲压以及冷却的各台搬运,而在各台连续地成形冲压成形品的成形装置(专利文献1)。
在这样的成形装置中,通过在冲压时使成形模成为规定的温度,由此玻璃材料被维持为足以加工玻璃材料的加热温度。另外,成形后的玻璃材料被冷却、固化,而最终被冷却到成形模不被氧化的200℃以下的温度。如上述那样,在冲压时正确地转印成形模的形状,并通过冷却、固化来保持该成形形状,由此玻璃材料成为形状精度高的冲压成形品。
专利文献1:国际公开第2013/103102号
然而,在上述那样的成形装置中,伴随着玻璃材料的成形形状的复杂化、量产化,而在成形品的生产性、形状/表面性状的品质等各方面还有改善的余地。
发明内容
本发明的目的在于,提供一种即使是具有复杂形状的成形品,也能够降低设备成本,并以高的形状精度和高的生产量成形的玻璃板的成形方法。
本发明由下述的结构构成。
(1)一种玻璃板的成形方法,加热玻璃板来成形为所希望的形状,其特征在于,具有如下工序:
将所述玻璃板夹在一对成形模之间;和
利用所述成形模,对相比于所述玻璃板的外周缘靠内侧的玻璃中央部向合模方向赋予0.1MPa以下的第1加压力或者不对所述玻璃中央部赋予加压力,对从所述玻璃中央部的外周到所述玻璃板的外周缘之间的玻璃外周部向合模方向赋予与所述第1加压力不同的0.1~10MPa的第2加压力,来对所述玻璃板进行冲压成形。
(2)一种玻璃板的成形方法,加热玻璃板来成形为所希望的形状,其特征在于,具有如下工序:
将所述玻璃板夹在一对成形模之间;
从所述一对成形模中的一个成形模对所述玻璃板向合模方向赋予0.1MPa以下的加压力,而将从玻璃中央部的外周到所述玻璃板的外周缘之间的环状的玻璃外周部夹入所述一对成形模之间,来在所述玻璃外周部的内周侧,在配置于所述合模方向的前方的第1成形模与所述玻璃板之间划分出空间,其中,所述玻璃中央部相比于所述玻璃板的外周缘靠内侧;以及
向在所述玻璃板与所述第1成形模之间划分出的所述空间供给负压,来使所述玻璃板吸附于所述第1成形模。
根据本发明,即使是具有复杂形状的成形品,也能够降低设备成本,并以高的形状精度和高的生产量成形。
附图说明
图1是表示将玻璃板成形为曲面形状的顺序的概略工序图。
图2是成形装置的概略结构图。
图3是多个灯加热器的剖视图。
图4是从上方观察图2所示的III-III线剖面的示意性的俯视图。
图5是表示沿着从预热台朝向冷却台的搬运方向搬运下模的情况的示意性的说明图。
图6是成形台的放大剖视图。
图7的(A)是上模的剖视图,(B)是下模的包括成形面的剖视图。
图8是从图7的(A)的B方向观察上模的后视图。
图9的(A)是变形例的上模的剖视图,(B)是变形例的下模的包括成形面的剖视图。
图10是玻璃板的俯视图。
图11A是按阶段表示使图7的(A)、(B)所示的下模和上模相互接近来对玻璃板进行成形加工的情况的概略工序说明图。
图11B是按阶段表示使图7的(A)、(B)所示的下模和上模相互接近来对玻璃板进行成形加工的情况的概略工序说明图。
图11C是按阶段表示使图7的(A)、(B)所示的下模和上模相互接近来对玻璃板进行成形加工的情况的概略工序说明图。
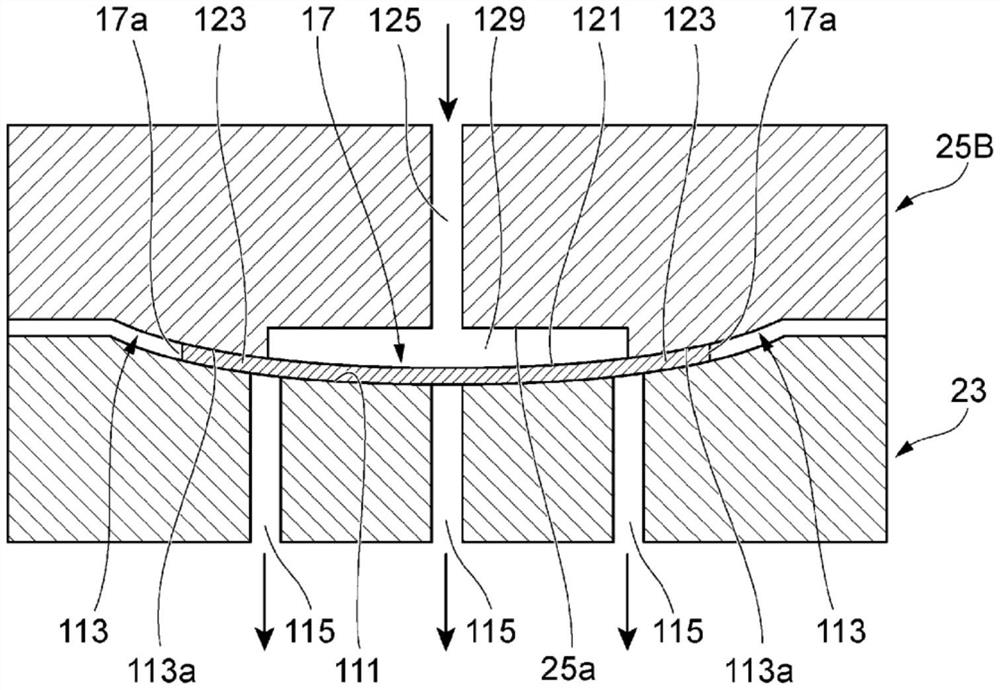
图12是表示利用第2成形方法对玻璃板进行成形加工的情况的概略的工序说明图。
图13A是按阶段表示使图9的(A)、(B)所示的变形例的下模和上模相互接近来对玻璃板进行成形加工的情况的概略工序说明图。
图13B是按阶段表示使图9的(A)、(B)所示的变形例的下模和上模相互接近来对玻璃板进行成形加工的情况的概略工序说明图。
图13C是按阶段表示使图9的(A)、(B)所示的变形例的下模和上模相互接近来对玻璃板进行成形加工的情况的概略工序说明图。
图14是表示利用第4成形方法对玻璃板进行成形加工的情况的概略的工序说明图。
图15是具备多个预热台、成形台、多个冷却台的成形装置的概略结构图。
图16是表示预热台、成形台、冷却台中的下模和玻璃板的温度变化的一个例子的曲线图。
图17是作为参考例的以往的成形装置的概略结构图。
图18是表示图15所示的成形装置的另一结构例的成形装置的概略结构图。
图19的(A)是表示试验例1、2的成形形状的概略剖视图,(B)是表示试验例3的成形形状的概略剖视图,(C)是表示试验例4的成形形状的概略剖视图,(D)是表示试验例5的成形形状的概略剖视图。
具体实施方式
以下,对本发明的实施方式详细地进行说明。
这里,提示将玻璃板成形为至少在一部分具有曲面形状的形状的成形装置和成形方法的具体例子来进行说明,但本发明也能够根据所使用的材料、成形形状、尺寸等各种制造条件,而适当地变更装置的结构、顺序。
另外,在本说明书中,表示数值范围的“~”以将记载于其前后的数值作为下限值和上限值包含的含义来使用。
<玻璃板的成形顺序的概要>
图1是表示将玻璃板成形为曲面形状的顺序的概略工序图。
玻璃板的成形装置100依次配置有预热台11、成形台13和冷却台15,还具备向预热台11搬入成形前的玻璃板17的装载部19、和从冷却台15搬出成形后的玻璃板17A的卸载部21。
在预热台11,加热被搬入的玻璃板17使其软化。在成形台13,对在预热台11被加热而软化的玻璃板17实施冲压成形等,而使其成形为所希望的形状。在冷却台15,将在成形台13被成形的玻璃板17缓慢冷却到能够抑制变形的程度的温度。
对于上述各台,从装载部19和卸载部21搬入、搬出玻璃板17。即,在装载部19,成形前的玻璃板17被载置在下模(第1成形模)23上。载置有玻璃板17的下模23被搬运至预热台11,并在预热台11中被加热为规定温度。被加热的玻璃板17与下模23一起被搬运至成形台13。
在成形台13,将玻璃板17夹持在搭载于成形台13的上模(第2成形模)25与下模23之间并合模。由此,玻璃板17被成形为曲面形状。成形后,上模25与下模23分离,留在下模23的加工后的玻璃板17A与下模23一起被搬运至冷却台15。
在冷却台15,缓慢冷却被加热的玻璃板17A。用卸载部21从下模23取出缓慢冷却后的玻璃板17A并搬出。
本结构的成形装置,在成形台13中,除了利用下模23和上模25对通过加热而软化的玻璃板17进行冲压的冲压成形之外,还根据目的而组合实施基于玻璃板的自重的弯曲(自重弯曲成形)、玻璃板的向成形模的成形面的吸附(真空吸附)、和玻璃板的向成形模的成形面的压接(压空成形)。通过选择性地采用这样的多个加压源,能够进行形状精度高的曲面成形。此外,对于自重弯曲成形而言,只要将玻璃板17配置在下模23之上并加热,就在玻璃板17产生自重弯曲,但能够使其具有可控制性。例如,基于自重的弯曲开始温度和冲压成形温度几乎没有乖离,由到冲压温度为止的加热对自重弯曲的影响小的情况下,不适用自重弯曲成形。另一方面,在所取的冲压前后的自重成形时间充分的情况下,由于重力影响成形后的形状,因此适用自重弯曲成形。这样,能够根据实施冲压成形前的待机时间和待机温度,来控制自重弯曲成形。
上述的各成形方法分别是以下所示的成形手法。
(1)冲压成形是指如下方法,即,将玻璃板设置在规定的成形模(下模、上模)间,在使玻璃板软化了的状态下,对上下成形模之间施加冲压载荷,弯曲玻璃板使其贴合于成形模,来成形为规定的形状。
(2)自重弯曲成形是指如下方法,即,在将板状玻璃设置在规定的成形模上后,加热玻璃板使其软化,利用重力弯曲玻璃板使其贴合于成形模,来成形为规定的形状。
(3)真空成形通过如下方式来成形,即,将玻璃板设置在规定的成形模上,例如将夹持成形模设置在玻璃板上,对玻璃板的周边密封。之后,用泵等来将成形模与玻璃板之间的封闭空间减压,从而对玻璃板的表面和背面赋予差压。
(4)在压空成形法中,将玻璃板设置在规定的成形模上,例如,将夹持成形模设置在玻璃板上,对玻璃板的周边密封。之后,利用压缩空气对玻璃板的上表面赋予压力赋予正压,对玻璃板的表面和背面赋予差压来成形。
<被成形体的玻璃材料>
作为被成形体的玻璃板,例如厚度为0.5mm以上,优选为0.7mm以上。另外,玻璃板的厚度为5mm以下,优选为3mm以下,更优选为2mm以下。只要是该范围,就能够在最终制品中得到不易破裂的强度。
作为构成玻璃板的玻璃组成,能够使用无碱玻璃、钠钙玻璃、钠钙硅酸盐玻璃、铝硅酸盐玻璃、硼硅酸盐玻璃、锂铝硅酸盐玻璃、硼硅酸盐玻璃。特别是在本结构的玻璃的成形装置中,当在玻璃板中使用了铝硅酸盐、铝硼硅酸盐的情况下优异。这些玻璃板具有高杨氏模量、高膨胀系数,因玻璃板的加热而产生高的热应力。因此,与玻璃板的所希望的弯曲形状之间的偏差变大,进一步对玻璃板进行了强化处理的情况下,有时压缩应力的值变得不均。在本结构的玻璃的成形装置中,玻璃板为这些玻璃组成,即便为弯曲形状,也能够减小形状偏差,能够抑制压缩应力的不均。
作为玻璃组成的具体例子,可以举出如下的玻璃,即,按用氧化物基准的摩尔%表示的组成,含有50~80%的SiO
(i)按用氧化物基准的摩尔%表示的组成,含有63~73%的SiO
(ii)按用氧化物基准的摩尔%表示的组成,含有50~74%的SiO
(iii)按用氧化物基准的摩尔%表示的组成,含有68~80%的SiO
(iv)按用氧化物基准的摩尔%表示的组成,含有67~75%的SiO
(v)按用氧化物基准的摩尔%表示的组成,含有56~73%的SiO
<成形装置的结构>
以下,对上述成形装置的一个结构例详细地进行说明。
图2是成形装置100的概略结构图。图3是从上方观察图2所示的III-III线剖面的示意性的俯视图。
在以下的说明中,有时对起到相同作用的部件、部位标注相同的附图标记,由此省略或者简化其说明。另外,附图所记载的方式以使本结构的说明明确的方式进行了示意化,并不是按照实际制品的尺寸、比例尺正确地表示的方式。
图2所示的成形装置100将从水平方向左侧朝向右侧的方向作为玻璃板的搬运方向TD,从搬运方向TD的上游侧依次配置有预热台11、成形台13和冷却台15。另外,预热台11、成形台13和冷却台15收容于腔室27的内部空间。腔室27内被氮气等惰性气体净化,使在玻璃成形时引起负面影响的气体的气体浓度下降。
腔室27具有:搬入口29,供玻璃板和下模23搬入腔室27内;和搬出口31,供成形后的玻璃板和下模23搬出。在搬入口29连接图1所示的装载部19,相同地在搬出口31连接图1所示的卸载部21(省略图示)。另外,在搬入口29和搬出口31设置未图示的闸门,除搬入、搬出玻璃板时以外关闭闸门,由此使腔室27内的环境气体维持恒定。在腔室27形成多个开口部101,在各个开口部101插入后述的支承轴37。用未图示的波纹管构造密封支承轴37与腔室27之间。除了封闭惰性气体的封闭构造之外,腔室27也可以是始终供给惰性气体来使腔室27内成为正压的半封闭构造。
图2所示的预热台11在比玻璃板的搬运面靠上方的位置配置有将玻璃板和下模23加热至所希望的加热温度的上部加热器(升温用加热部)35。上部加热器35优选为配置为与下模23相对,并具备支承于未图示的固定框的多个灯加热器36作为热源的结构。作为灯加热器36,例如采用红外线灯加热器。在红外线灯加热器中,例如能够使用碳丝灯、卤素灯等公知的各种加热器,只要是能够进行辐射加热的发热体即可。
图3是多个灯加热器36的剖视图。
灯加热器36具有:发热线材36A,被通电而发热;和石英等的管材36B,包围发热线材36A的周围。在管材36B的内周面或者外周面,以保留照射窗38的方式形成陶瓷涂层40。照射窗38的以发热线材36A为中心的开口角(中心角)θ,根据从灯加热器36的中心到作为被加热体的下模23的距离Ld、灯加热器36的配置间距Lc而决定,以对下模23均匀地照射热线。这里作为一个例子,将开口角θ设为60°。
另外,基于上部加热器35的加热区域(排列有灯加热器36的区域)优选为比下模23的水平面中的外缘宽,该情况下,能够均匀地加热下模23的整体。
在上部加热器35的上方,配置由上述的支承轴37支承的水冷板39。优选在水冷板39的与上部加热器35对置的表面设置反射膜。在水冷板39形成冷却水的流路,供通过支承轴37而供给和排出的冷却水循环。该水冷板39抑制上部加热器35对除下模23、玻璃板以外的周围部件进行的不必要的加热。
在下模23的下方以留有间隙的方式配置热扩散板41。另外,在热扩散板41的下方配置下部加热器(升温用加热部)43。热扩散板41由热传导性优异的材质构成,使下部加热器43的发热均匀地辐射传导至下模23。作为热扩散板41的材质,例如能够使用炭化钨、碳、超硬合金、铜、铁、不锈钢材料等。下部加热器43能够利用接触加热式的台加热器等,但也可以设为与上部加热器35相同的辐射加热式的结构。
另外,在下部加热器43的下方配置水冷板47。水冷板47由固定于腔室27的下部的支承体45来支承,抑制下部加热器43对除热扩散板41和下模23以外的周围部件进行的不必要的加热。水冷板47是与上述的水冷板39相同的结构,从支承体45供给和排出冷却水。
在冷却台15中,下模23与热扩散板41之间的间隙并不特别限定,但若过大则加热效率下降,若过小则难以抑制玻璃板的温度偏差,因此作为间隙的下限值设为1mm。另外,作为间隙的上限值设为10mm。
以包围下模23的载置玻璃板的上表面侧、和上部加热器35、水冷板39以及支承轴37的侧方的台外周的方式,配置隔热框体51。隔热框体51对载置于配置在台内的下模23的玻璃板的侧方进行覆盖。
隔热框体51例如能够使用抄造以硅酸钙为主体的材料而成的隔热板等。除此之外,例如也可以是不锈钢材料等的金属板。如图4所示,隔热框体优选为包围比下模23的外周靠外侧的宽广的范围的、水平剖面为长方形的框体。在隔热框体51也可以具备覆盖框上部的盖体。
另外,在成形台13、冷却台15中也优选为配置有相同结构的隔热框体53、55。为了提高得到的玻璃板的成形品质,降低各台内的玻璃板的温度偏差特别重要。因此,优选为使各台全部具备隔热框体。据此,能够使被隔热框体51、53、55覆盖的内部空间的温度分布分别均匀。并且,由于隔热框体51、53、55的外侧由腔室27包围,因此在隔热框体51、53、55内,变得不易产生与外部之间的热的流入和流出,得到更均匀的温度分布。由此,热效率提高,能够缩短各台中的处理时间,另外,能够减少各台中的玻璃板的温度偏差。
如图4所示,在预热台11、成形台13和冷却台15分别配置下模23。在各下模23,在与搬运方向TD正交的两侧的侧面23a、23b,分别向外侧突出地设置一对模支承用杆61。各个模支承用杆61支承于隔着下模23配置于两侧的模搬运部63A、63B。对于模搬运部63A、63B而言,虽然省略详细的机构的说明,但利用搬运方式为步进梁方式的搬运机构,沿着搬运方向TD搬运沿着各台配置的多个下模23。
图5表示沿着从预热台11朝向冷却台15的搬运方向TD搬运下模23的情况的示意性的说明图。
模搬运部63A、63B支承从多个下模23分别突出的模支承用杆61,利用步进梁方式,从预热台11向成形台13、从成形台13向冷却台15同时搬运多个下模23。该搬运时的下模23的上下方向的位移在不与隔热框体51、53、55、热扩散板41等固定侧部件干涉的范围内进行。
接下来,对图2所示的冷却台15进行说明。
在冷却台15的下模23的上方依次配置热扩散板65、与预热台11相同的上部加热器(降温用加热部)67、水冷板59。热扩散板65是与上述的热扩散板41相同的结构。水冷板59由固定于腔室27的上部并形成有冷却水的流路的支承轴71支承。
在冷却台15的下模23的下方,与预热台11相同地配置热扩散板73、下部加热器(降温用加热部)75、水冷板77。水冷板77由固定于腔室27的下部的支承体79支承,抑制下部加热器75对除热扩散板73和下模23以外的周围部件进行的不必要的加热。水冷板77是与上述的水冷板39相同的结构,从支承体79供给和排出冷却水。
也可以使冷却台15的下模23与热扩散板65之间、和下模23与热扩散板73之间分别紧贴,但通过设置间隙能够使下模23的温度分布更加均匀,因此优选。
接下来,对图2所示的成形台13进行说明。
图6是成形台13的放大剖视图。
在成形台13的下模23的上方依次配置上模25、热扩散板81、上部加热器(保温用加热部)83、隔热板85、水冷板87。
上模25连接于未图示的柱塞,被支承为能够在合模于下模23的成形位置、与成形位置上方的退避位置之间升降移动。上模25在搬运下模23时等除成形时以外配置于退避位置。另外,也可以设为将上模25固定在成形台13内,并在搬运下模23时通过使下模23上升来合模的结构。该情况下,能够省略上模移动机构,从而能够降低设备成本。
水冷板87由固定于腔室27的上部的支承轴89支承,抑制上部加热器83对除上模25和热扩散板81以外的周围部件进行的不必要的加热。水冷板87是与上述的水冷板39相同的结构,从支承轴89供给和排出冷却水。
隔热板85例如能够采用陶瓷、不锈钢、模具钢、高速钢(锋钢)等公知的隔热材料。在使用金属系材料的情况下,优选为在表面实施CrN、TiN、TiAlN等的涂覆处理。另外,也可以将隔热板85的表面设为粗糙面构造。该情况下,在与水冷板39之间产生微小的间隙,从而可以得到更好的隔热效果。
在成形台13的下模23的下方,依次配置热扩散板91、下部加热器(保温用加热部)93、隔热板85、水冷板97。水冷板97由固定于腔室27的下部的支承体99支承,抑制下部加热器93对除热扩散板91和下模23以外的周围部件进行的不必要的加热。水冷板97是与上述的水冷板39相同的结构,从支承体99供给和排出冷却水。
成形台13的上模25安装于在上下方向上被驱动的未图示的缸,被支承为利用缸的驱动而能够上下运动。作为缸,能够使用气缸、油压缸、使用了电动伺服马达等的伺服缸等。
成形台13的上模25面接触于热扩散板81,使得来自上部加热器83的热均匀地传导至上模25。另外,成形台3的下模23面接触于热扩散板91,使得来自下部加热器93的热均匀地传导至下模23。此外,根据成形条件等,而也可以使上模25与热扩散板81之间、和下模与热扩散板91之间分离。
图7的(A)是上模25的剖视图,(B)是下模23的包括成形面111的剖视图。图8是从图7的(A)的B方向观察上模25的后视图。
如图7的(A)和图8所示,配置于合模方向的后方的上模25具有环状的突起部113。突起部113朝向下模23突出地设置于与图7的(B)所示的下模23的成形面111的外边缘部对应的上模25。突起部113具有随着从上模25的外周朝向中心而突出量缓缓地变大的倾斜面113a。成形面111被设为与玻璃板的成形形状一致的形状。即,图8所示的环状的突起部113的内侧成为底面为平坦状的有底槽25a。
图7的(B)所示的配置于合模方向的前方的下模23,具有在成形面111开口的多个真空成形用的吸引孔115。吸引孔115连接于未图示的吸引泵等吸引源。利用吸引泵的驱动,在规定的时间点吸引下模23与玻璃板17之间的空间内的气体,使玻璃板17紧贴于成形面111。
下模23和上模25能够由碳、不锈钢、陶瓷、超硬合金等材料构成。特别是从均匀化热分布的观点优选为采用碳。
另外,上模25的突起部113的形状并不限制于此。突起部113也可以不形成上述的有底槽25a,而是突出面为平坦状。
图9的(A)是变形例的上模25A的剖视图,(B)是变形例的下模23A的包括成形面111A的剖视图。
变形例的上模25A具有朝向变形例的下模23B突出的突起部113A。在突起部113A形成随着从上模25A的外周朝向中心而突出量缓缓变大的倾斜面113a,顶部形成平坦状的顶面113b。
另外,下模23A与图7的(A)所示的下模23相同地,具有形状与玻璃板的成形形状一致的成形面111A。而且,在成形面111A的曲率成为最大的位置设置有吸引孔115。在本结构的情况下,将与上模25A的倾斜面113a对应的倾斜面111a、和与顶面113b对应的底面111b连接起来的俯视观察时呈环状的区域成为最大的曲率。以在该环状的区域的至少一部分开口的方式设置有多个吸引孔115。
本结构的上模25A的突起部113A和下模23A的成形面111A在相互对应的位置,突起部113A的曲率小于成形面111A的曲率。据此,在玻璃板17被倾斜面111a和113a夹持时,与玻璃板17接触的接触面积变小,玻璃板17的变形、移动变得容易。由此,能够使玻璃板17忠实地沿着成形面111A,从而能够提高形状精度。
而且,图2所示的预热台11、成形台13、冷却台15中的各上部加热器35、67、83和各下部加热器43、75、93均连接于未图示的温度控制部,而分别设为独立的设定温度。温度控制部例如利用比例控制、PI控制、PID控制等控制动作而在各台实现加热、保温、缓慢冷却处理。
此外,上述的成形装置100将玻璃板的搬运方向TD设为水平方向,但也可以设为例如铅垂方向等从水平方向倾斜的方向。该情况下,有时下模23和上模25不是上下配置,但通过调整玻璃板的加热温度,不过度降低玻璃板的粘度,由此能够边抑制重力的影响边在下模23与上模25之间成形。
<玻璃板材的成形顺序>
接下来,采用上述结构的成形装置100,对将玻璃板17成形为曲面形状的具体的顺序及其作用进行说明。
利用未图示的机器人臂等移送单元、或者作业者的手来将成形前的玻璃板17载置于图1所示的装载部19的下模23。
装载部19的下模23由图4所示的模搬运部63A、63B,以载置玻璃板17的状态搬运至预热台11。若在载置玻璃板17之前预先将下模23加热至高于常温的温度,则能够缩短在预热台11的加热时间,因此优选。例如,载置玻璃板17时的下模23的温度优选为300℃以上,更优选为500℃以上。
(预热工序)
在图2所示的预热台11,利用上部加热器35和下部加热器43,加热下模23上的玻璃板17直到成为目标加热温度(例如,500℃~700℃)。
玻璃板17的适合冲压成形的温度,根据玻璃板17本身的组成而不同,若温度过低则玻璃板17不充分地软化。因此,在预热台11进行加热以使得优选成为玻璃板17的玻璃化转变温度Tg以上,更优选成为Tg+40℃以上,进一步优选成为Tg+80℃以上。另一方面,若玻璃板17的温度过高则玻璃板17过度软化而成为不适合维持形状的状态。因此,在预热台11加热玻璃板17以使得优选成为Tg+200℃以下,更优选成为Tg+150℃以下,进一步优选成为Tg+120℃以下。
另外,从与上述相同的观点,在预热台11进行加热以使得玻璃板17的粘度优选成为5.22×10
从得到的玻璃板成形品的面品质的观点,优选在预热台11均匀地加热玻璃板17。即,优选减少在预热台11加热中的玻璃板17的温度偏差。具体而言,在预热台11加热中的玻璃板17的温度偏差优选为不足30℃,更优选为不足20℃,进一步优选为不足10℃。
另外,加热时的下模23的与玻璃板17接触的区域的温度分布,优选为不足30℃,更优选为不足25℃,进一步优选为不足20℃。
(成形工序)
加热至目标加热温度的玻璃板17与下模23一起被搬运至成形台13。在成形台13,对被加热的玻璃板17沿合模方向赋予冲压等外力来成形为所希望的形状。
在成形台13,配置于退避位置的上模25下降,在与下模23之间夹持玻璃板17,而对玻璃板17进行成形加工。关于该成形加工的详细情况后述。在成形台13,由上部加热器83和下部加热器93保温,以使得由预热台11加热的玻璃板17的温度维持恒定。
成形台13中的玻璃板17的温度,优选为将从上述的预热台11中的加热温度起的变动抑制为20℃以下。另外,从得到的玻璃板成形体的面品质的观点,优选在成形台13均匀地加热玻璃板17。具体而言,在成形台13成形中的玻璃板17的温度偏差优选为20℃以内。
玻璃板17被成形加工后,上模25上升而返回至退避位置。然后,下模23与成形完毕的玻璃板17A一起被搬运至冷却台15。
(冷却工序)
在冷却台15,上部加热器67和下部加热器75的设定温度设定为低于目标加热温度的温度,缓慢冷却玻璃板17A和下模23。在冷却台15,缓慢冷却玻璃板17直到被加热、成形的玻璃板17A的形状稳定。
在冷却台15,一边调整基于上部加热器67和下部加热器75的加热温度,一边缓慢冷却玻璃板17A。若冷却台15中的冷却速度过快,则变得容易在玻璃板17A产生变质、温度偏差。因此,冷却台15中的玻璃板17A的冷却速度优选在30s设为20℃,更优选设为30℃,进一步优选设为40℃。另外,冷却时的玻璃板17A的温度分布优选设为30℃以下,更优选设为25℃以下,进一步优选设为20℃以下。
缓慢冷却后的玻璃板17A在被搬运至腔室27的外部后,如图1所示,通过卸载部21取出。在卸载部21,从模面取出载置于具有300°以上优选为具有500℃以上的温度的下模的成形、缓慢冷却后的玻璃板17A。玻璃板17的取出可以是基于未图示的机器人臂等移送单元的搬出,也可以是基于作业者的手的搬出。
<温度分布的均匀化效果>
上述的玻璃板17、17A的均匀的温度分布,通过隔热框体51、53、55对热的封入效果、和隔热框体51、53、55的外侧的腔室27对外部的高的遮热效果、还有热扩散板41、65、73、81、91对加热器的均热化效果等的协同效果而实现。另外,通过基于预热台11的上部加热器35的辐射加热、来自下部加热器43的导热加热、来自成形台13的上部加热器83和下部加热器93的导热加热、以及基于冷却台时的上部加热器67和下部加热器75的经由热扩散板65、73的辐射加热,而在各台设为分别不同的加热方式。另外,各台的上部加热器和下部加热器分别能够以独立的设定温度加热,从而能够进行极细致的温度控制。
在每个这样的台,每个加热器分别独立地进行加热控制,由此能够将玻璃板17、17A的温度分布以高的等级均匀化。另外,与位置对应的微调变得容易,从而能够正确地实现如设计那样的加热处理。并且,通过由隔热框体51、53、55和腔室27包覆加热环境气体,抑制向外部的热流出,其结果是,提高加热控制、降温控制的响应性,从而能够均匀且短时间到达所希望的温度。
另外,模搬运部63A、63B由于是用步进梁方式搬运下模23的结构,因此提高台间的移动速度。由此,抑制由在台间的放热导致的热损失,由此也实现温度分布的均匀化。
此外,上述的热扩散板41、65、73、81、91,根据成形条件,也能够省略配置,但通过设置热扩散板,而将各台中的玻璃板17、17A的温度偏差抑制得小。
<成形工序的详细情况>
接下来,对成形台13中的玻璃板17的成形方法、和成形模的构造详细地进行说明。
首先,对用于成形的玻璃板17的形状进行定义。
图10是玻璃板17的俯视图。
玻璃板17具有比玻璃形状的外周缘17a靠内侧的玻璃中央部121、和从玻璃中央部121的中央部外周121a到外周缘17a之间的玻璃外周部123。此外,在图10中对外周部123标注阴影线。在成形工序中,将玻璃中央部121的至少一部分成形为曲面形状。
(第1成形方法)
图11A、图11B、图11C是按阶段表示使图7的(A)、(B)所示的下模23和上模25相互接近来对玻璃板17进行成形加工的情况的概略工序说明图。
如图11A所示,在下模23的成形面111,以玻璃板17的外周缘17a接触的状态载置玻璃板17。若使上模25朝向该下模23下降,则上模25的突起部113与载置于下模23的玻璃板17接触。
上模25具有与玻璃板17接触的部分、和不接触的部分,仅突起部113的倾斜面113a与玻璃板17的玻璃外周部123接触。然后,如图10B所示,若上模25进一步下降,则由于突起部113的倾斜面113a的倾斜,而玻璃板17被冲压为向下侧凸出的形状。即,上模25即使仅与玻璃板17呈环状地接触,也能够使玻璃板17朝向下模23变形。另外,玻璃板17还由于自身的自重而向下侧挠曲,变形为沿着下模23的成形面111。
接下来,如图11C所示,通过从吸引孔115供给负压来使玻璃板17真空吸附于成形面111。由此,玻璃板17紧贴于成形面111,成形面111的曲面形状转印至玻璃板17。由此,能够使仅通过冲压成形不易紧贴玻璃板17和成形面111的部分也可靠地紧贴,即使是仅通过冲压成形而困难的复杂形状也能够容易地成形。
吸引孔115的位置、个数、大小等并不特别限定,在成形面111中,优选在仅通过冲压成形不易使玻璃板17紧贴的部分形成吸引孔115。另外,对于吸引孔115的大小,优选为适当地调整为在玻璃板17不残存吸引孔115的痕迹、或者即使残存也不明显的程度。
通常,在玻璃板的冲压成形中,使玻璃板的全面与成形模接触的状态下夹入而成形。因此,为了确保得到的玻璃板成形品的面品质,以比较低的温度成形。因此,为了使玻璃板变形为所希望的形状,而需要比较长的时间。因此,在成形复杂形状的情况下难以在能够确保面品质的低温域进行成形。另一方面,在采用上述结构的下模23和上模25进行成形的情况下,上模25不与玻璃板17的玻璃中央部121接触。因此,即使以比较高的温度成形,也不在玻璃中央部121引起由与成形模的接触而导致的表面粗糙等负面影响,能够得到面品质优异的玻璃板成形品。这样,在本结构的成形台13,能够进行比较高的温度下的成形,因此能够在短时间内完成成形。即,若采用上述的成形模,则能够在短时间内得到面品质优异的玻璃板成形品。
此外,本结构的下模23和上模25是用于得到玻璃中央部121的整体以恒定的曲率弯曲的玻璃板成形品的模,但下模23和上模25的形状并不限定于图示例的形状。下模23和上模25的形状根据成形的目标形状,能够适当地变更。
本结构的下模23和上模25实现组合了冲压成形、真空成形、以及基于重力的自重弯曲成形的成形,但根据材料、成形条件等,而仅通过除了真空成形以外的冲压成形和基于重量的成形也能够成形。
(第2成形方法)
在第1成形方法中,组合了冲压成形、真空成形、自重弯曲成形三种成形,但在第2成形方法,进一步组合压空成形。
图12是表示利用第2成形方法对玻璃板17进行成形加工的情况的概略的工序说明图。该情况下的成形模除了在上模25B的环状的突起部113的内侧形成有压空成形用的气体喷出孔125以外,结构与第1成形方法的成形模相同。
气体喷出孔125通常设置于上模25B的不与玻璃板17接触的部分。气体喷出孔125的个数、大小等并不特别限定。
在采用上述结构的下模23和上模25B,且并用冲压成形和压空成形的情况下,在使上模25B的突起部113与玻璃板17的玻璃外周部123接触后,从气体喷出孔125喷出气体。于是,玻璃板17被挤压于下模23的成形面111。即,由于突起部113形成为环状,与玻璃板17的接触也成为环状,因此在下模23的成形面111与玻璃板17之间形成封闭空间129。对该封闭空间129供给气体,封闭空间129内的压力变为正压。由此玻璃板17被按压于成形面111。
另外,通过与上述的压空成形一起,还同时实施上述的真空成形、基于重力的成形,由此能够使玻璃板17更快速更可靠地沿着成形面111,从而能够缩短到成形完成为止的所需时间。这样,通过将真空成形、压空成形、自重弯曲成形中的至少任一个组合于冲压成形,能够简单地实现复杂形状的成形,能够进一步缩短成形时间。
另外,真空成形、压空成形在冲压成形的实施中能够在任意的时间点进行,实施顺序可以是冲压成形、真空成形、压空成形的顺序,也可以是冲压成形、压空成形、真空成形的顺序。通过先于真空成形和压空成形而实施冲压成形,能更可靠地进行玻璃板17的相对于成形面111的定位。
另外,通过同时实施各成形,能够更加提高玻璃板17与成形面111的紧贴性,容易在玻璃板17产生褶皱的形状的加工也变得容易。
(第3成形方法)
图13A、图13B、图13C是按阶段表示使图9的(A)、(B)所示的变形例的下模23A和上模25A相互接近来对玻璃板17进行成形加工的情况的概略工序说明图。
如图13A所示,在下模23A的成形面111A,以玻璃板17的外周缘17a接触的状态载置玻璃板17。若使上模25A朝向该下模23A下降,则上模25A的突起部113A的顶面113b与载置于下模23A的成形面111A的玻璃板17接触。
此时的上模25A的顶面113b通过与玻璃板17面接触而使伴随上模25A的下降而对玻璃板17施加的压力分散。即,成为轻接触状态。然后,如图13B所示,上模25进一步下降,由于突起部113A的倾斜面113a,玻璃板17以轻载荷(0.1MPa以下)被冲压为向下侧凸出的形状。此时,在下模23A的底面111b与玻璃板17之间,形成有与吸引孔115连通的间隙117。换言之,上模25A的突起部113A的顶面113b、和下模23A的成形面111A的底面111b被设为即使合模也不接触的形状。
接下来,如图13C所示,通过从吸引孔115向间隙117内供给负压来使玻璃板17真空吸附于成形面111A。由此,玻璃板17紧贴于成形面111A,成形面111A的曲面形状转印至玻璃板17。此外,在从图13B向图13C推进成形的过程中,冲压压力优选保持为比图13B的轻载荷(0.1MPa以下)低。
吸引孔115设置于下模23A的成形面111A中的曲率成为最大的位置,由此玻璃板17与成形面111A之间的间隙117,随着玻璃板17从底面111b的中央侧朝向周边侧缓缓地紧贴于成形面111A而消失。于是,最后玻璃板17紧贴于成形面111A的曲率成为最大的部分。这样,玻璃板17从与上模25A中的突起部113A的顶面113b抵接的状态,不产生间隙地被交接至下模23A中的成形面111A的底面111b。
此外,玻璃外周部123由于是在上模25A的倾斜面113a与下模23A的倾斜面111a之间轻轻地被冲压的状态,因此利用来自吸引孔115的吸引,玻璃外周部123能够容易地向底面111b侧变形。因此,玻璃板17不在玻璃外周部123局部性地被拘束,而是成为玻璃板17整体沿着成形面111A以大致均匀的压力粘贴的状态。
根据该成形方法,实质性地利用真空吸附来进行使玻璃板17沿着下模23A的成形面111A而转印形状的动作。因此,在玻璃面内产生均匀的压力分布,因此不在玻璃板17的板面产生由上模25A的冲压导致的局部性的模接触为原因的压痕、褶皱,能够进行高品质的成形。另外,由于利用真空吸附加工为所希望的形状,因此即使是仅通过冲压成形而困难的复杂的形状,也能够进行高精度且高品质的成形。
(第4成形方法)
在第4成形方法中,对第3成形方法进一步组合压空成形。
图14是表示利用第4成形方法来对玻璃板17进行成形加工的情况的概略的工序说明图。该情况下的成形模除了在上模25C的突起部113A的内部形成有压空成形用的气体喷出孔125以外,结构与第3成形方法的成形模相同。
与前述的第2成形方法的情况相同地,气体喷出孔125的开口通常设置于上模25B的不与玻璃板17接触的部分。气体喷出孔125的个数、大小等并不特别限定。
在采用上述结构的下模23A和上模25C,且并用冲压成形和压空成形的情况下,在使上模25C的突起部113A接触于玻璃板17的玻璃外周部123后,从气体喷出孔125喷出气体。于是,玻璃板17被挤压于下模23A的成形面111A。即,突起部113A与玻璃板17的接触区域成为环状,因此在下模23A的成形面111A与玻璃板17之间形成封闭空间129。对该封闭空间129供给气体,封闭空间129内的压力变为正压。由此玻璃板17被按压于成形面111A。
来自上述的气体喷出孔125的气体喷出,可以在基于吸引孔115的玻璃板17的真空吸附后进行,也可以在真空吸附前进行。
<其他成形装置的结构例>
上述的玻璃板的成形装置100也可以设为预热台11和冷却台15分别具备多个的结构。
图15是具备多个预热台11、成形台13、多个冷却台15的成形装置200的概略结构图。
预热台11沿着下模23的搬运方向TD设置于四处(PH1~PH4),冷却台15沿着下模23的搬运方向TD设置于四处(C1~C4)。成形台13设置于预热台11与冷却台15之间的一处(PM1)。
对于预热台11的PH1~PH4而言,加热温度设定为沿着搬运方向TD阶段性地变高。由此,下模23和玻璃板17随着向搬运方向TD搬运而缓缓地升温,被加热到到达作为成形温度的目标加热温度。
对于冷却台15的C1~C4而言,加热温度设定为沿着搬运方向TD阶段性地变低。由此,下模23和玻璃板17随着向搬运方向TD搬运而缓缓地降温,实施从目标加热温度起的缓慢冷却。
图16是表示预热台11、成形台13、冷却台15中的下模23和玻璃板17的温度变化的一个例子的曲线图。
从图15所示的装载部19(LD)供给至预热台11的PH1的玻璃板17载置于预先被加热到规定的温度Tc的下模23,从室温T
在成形台13(PM),一边以目标加热温度TPM的恒定温度保持玻璃板17一边进行成形。
成形后,被搬运至冷却台15的C1~C4,下模23和成形后的玻璃板17A的温度缓缓地下降。从C4被搬运至图12所示的卸载部21(ULD)的玻璃板17A被自然放冷。
在预热台11和冷却台15的各台,以使下模23和玻璃板17、17A在各个台均匀地成为设定温度的方式进行温度管理。台的数量越多,温度的变化幅度越宽。另外,从生产间隔时间的观点,优选减少台的数量。各台的数量根据成为加工对象的玻璃板的尺寸、加工形状等而适当设定。例如,在玻璃板的尺寸大的情况、进行复杂形状的成形的情况下,为了避免急剧的温度变化,优选增加预热台11和冷却台15的数量。
图17是作为参考例的以往的成形装置的简要图。
以往的成形装置是利用下模131和上模135全面冲压玻璃板17的结构,加热温度设定为低于上述的成形温度(目标设定温度)。因此,需要以合模的状态保持玻璃板17直到成形形状稳定为止。其结果是,成形时间T
另一方面,图15所示的本结构的成形装置200由于组合仅与玻璃外周接触的冲压成形、真空成形、压空成形、基于重力的成形来成形玻璃板17,因此能够将加热温度设定到比以往高的温度,并且,借助各成形的协同效果而使玻璃板紧贴于成形模的成形面,成形形状很快稳定。即,变得不易产生玻璃板的回弹。由此,成形台13只需一个台即可,能够削减设备成本,提高生产量。
另外,通过将下模23的温度预先加热到规定的温度Tc,能够更加缩短到目标设定温度为止的到达时间,从而能够缩短生产间隔时间。
图18是表示图15所示的成形装置200的另一结构例的成形装置300的简要图。
本结构的成形装置300具备多个具有图12所示的预热台11、成形台13、以及冷却台15的成形线。对于成形装置300,在图18中示出了具备第1成形线141和第2成形线143这两条线的结构,但也可以具备三条以上的线。
成形装置300的第1成形线141的装载部19连接于第2成形线143的卸载部21,第1成形线141的卸载部21连接于第2成形线143的装载部19。于是,第1成形线141的下模23和第2成形线143的各下模23分别被共通地使用,在各线循环。
根据本结构,使搬运至一成形线的卸载部21的下模23返回至另一成形线的装载部19,由此抑制模温度的下降,在成形装置300运行时,始终维持为规定的温度Tc以上。由此,下模23的温度变化幅度变小,能够减轻对下模23的温度循环负荷。另外,能够抑制用于加热的能耗,降低运行成本。
并且,与串联地配置多个成形线的结构比较,能够减小成形装置200的设置空间,由此也能够削减设备成本。
<成形工序的详细情况>
接下来,对在成形台13的成形工序中的优选成形条件进行说明。
在本结构的成形装置100、200、300中,优选基于以下所示的成形条件成形玻璃板。
(加压条件)
在冲压成形中,对图10所示的玻璃板17的玻璃中央部121和玻璃外周部123的各个区域赋予不同的压力来对玻璃板17进行冲压成形。具体而言,在不实施真空成形、压空成形的情况下,优选赋予玻璃中央部121的压力Pct为0~0.1MPa,赋予玻璃外周部123的压力Peg为0.1~10MPa。
在不实施真空成形、压空成形的情况下,除重力以外的压力不作用于玻璃板17的玻璃中央部121。另一方面,对玻璃板17的玻璃外周部123赋予高于玻璃中央部121的压力,而使玻璃板17固定于成形模。由此,能够进行玻璃板17没有位置偏移的稳定的冲压成形。另外,能够根据与玻璃板17接触的突起部113、成形面111(参照图7的(A)、(B))的倾斜方向、倾斜角度,而决定基于冲压成形的玻璃板17的变形方向(向下凸或者向上凸)、变形量。
在并用冲压成形和真空成形来成形玻璃板17的情况下,优选利用冲压赋予玻璃中央部121的压力Pct为0~0.1MPa,赋予玻璃外周部123的压力Peg为0.1~10MPa。于是,基于冲压成形和真空成形对玻璃板17赋予的压力的合计设为,玻璃外周部123的压力Peg高于玻璃中央部121的压力Pct的压力(Peg>Pct)。
并且,在并用冲压成形、真空成形以及压空成形来成形玻璃板17的情况下,优选为利用冲压赋予玻璃中央部121的压力Pct为0~0.1MPa,赋予玻璃外周部123的压力Peg为0.1MPa~10MPa。于是,基于冲压成形、真空成形以及压空成形对玻璃板17赋予的压力的合计设为,玻璃外周部123的压力Peg高于玻璃中央部121的压力Pct的压力(Peg>Pct)。该情况下,由于除了真空成形之外对玻璃中央部121还赋予基于压空成形的压力,因此赋予玻璃中央部的压力比仅冲压成形和真空成形的情况大。
上述条件可以包括在冲压成形前后基于自重成形的弯曲效果,也可以不包括。
(玻璃板的温度)
在将玻璃板17成形为所希望的形状时,成形时的温度的下限值优选为400℃,更优选为Tg+40℃,进一步优选为Tg+80℃。另外,成形时的温度的上限值优选为750℃,更优选为680℃,进一步优选为650℃。
通过将成形温度设为上述范围,能够以短时间保持玻璃板17的成形形状,缩短成形时间。
(玻璃板的粘性)
在将玻璃板17成形为所希望的形状时,成形时的玻璃板17的粘性根据上述的玻璃板17的材料种类等而不同,但从成形性的观点优选为1×10
特别是,成为成形性的指标的
(玻璃板的尺寸精度)
根据上述的制造装置和成形方法,能够得到形状精度优异的玻璃板成形体。作为玻璃板成形体的形状品质的评价指标,例如可以举出与设计形状(外观设计面)比较的面内形状偏差。
面内形状偏差是指,在沿着设计形状设定了法线时,对玻璃板成形体的形状进行曲面近似以使法线方向上的与外观设计面之间的距离的绝对值在面内成为最小,将进行该曲面近似而得的面和外观设计面的法线方向的偏移量的偏差值定义为面内形状偏差。
利用本结构的制造装置和成形方法得到的玻璃板成形体的面内形状偏差优选为0.6mm以下,更优选为0.4mm以下。
在表1汇总示出玻璃板的成形条件及其成形结果。
采用图1所示的成形装置,通过仅利用自重弯曲的成形、利用全面冲压成形、仅利用冲压玻璃外周部的边缘冲压成形这样的冲压成形、利用组合冲压成形和真空成形而成的成形这样的各成形法,对尺寸100×50mm(厚度t=1.1mm)的玻璃板(材料:Dragontrail(注册商标))进行成形。
玻璃板的成形形状设为图19的(A)所示的具有单一曲率半径的试验例1、2、图19的(B)所示的S字形状的试验例3、图19的(C)所示的J字形状的试验例4、和图19的(D)所示的鞍形状的试验例5。试验例1的曲率半径R为2000mm,试验例2的曲率半径R为800mm。另外,S字形的试验例3的曲率半径从一侧端部依次为R1为2000mm,R2为100mm,R3为2000mm。J字形的试验例4具有从平坦状连接有曲率半径R为50mm的曲面的形状。鞍形的试验例5具有曲率半径R5为800mm的凸面、和在与该凸面正交的方向上曲率半径R6为2000mm的凹面。
在试验例1~4中,将全面冲压成形的压力设为0.1MPa,在试验例5中将全面冲压成形的压力设为0.1MPa以下和超过0.1MPa的压力这两个而进行。
对利用各个成形法得到的成形体,评价了成形的生产间隔时间、形状精度、面品质。评价基准如以下所示。
·生产间隔时间(成形所需要的时间)
◎:不足30s
○:30s以上且不足100s
△:100s以上且不足200s
▲:200s以上且不足500s
×:501s以上
·形状精度(与外观设计形状的偏差)
◎:不足0.2mm
○:0.2mm以上且不足0.4mm
△:0.4mm以上且不足0.6mm
▲:0.6mm以上且不足0.8mm
×:1.0mm以上
·面品质(基于图像处理计数的缺点的数量)
◎:0~5个
○:6~10个
△:11~50个
▲:51~100个
×:101个以上
[表1]
在仅自重弯曲成形的情况下,任一试验例都没能够加快生产间隔时间。
在全面冲压成形的情况下,若将压力设为0.1Mpa以下,则玻璃板的全面与成形模接触,因此成形后的玻璃表面的表面粗糙度增大,面品质下降。但是,在试验例5中,若赋予超过0.1MPa的压力,则面品质提高。
当在边缘冲压成形中仅冲压的情况下,在单曲形的试验例1、2中,得到生产间隔时间、形状精度良好,特别是面品质优异的结果。但是,在成形形状变为比较复杂的试验例3、4、5中,生产间隔时间、形状精度、面品质均不合格(NG)。
另一方面,当在边缘冲压成形中组合了冲压成形和真空成形的情况下,在试验例1~4中得到了良好的结果,在试验例5中面品质不合格(NG)。即,在试验例5的鞍形状的情况下,若在全面冲压成形中赋予超过0.1MPa的压力则得到良好的结果。
本发明并不限定于上述的实施方式,本领域技术人员基于相互组合实施方式的各结构、说明书的记载以及公知的技术而进行变更、应用的实施方式也是本发明的预定内容,包含于要求保护的范围。
如上所述,在本说明书中公开了以下事项。
(1)一种玻璃板的成形方法,加热玻璃板来成形为所希望的形状,其特征在于,具有如下工序:
将所述玻璃板夹在一对成形模之间;和
利用所述成形模,对相比于所述玻璃板的外周缘靠内侧的玻璃中央部向合模方向赋予0.1MPa以下的第1加压力或者不对所述玻璃中央部赋予加压力,对从所述玻璃中央部的外周到所述玻璃板的外周缘之间的玻璃外周部向合模方向赋予与所述第1加压力不同的0.1~10MPa的第2加压力,来对所述玻璃板进行冲压成形。
根据该玻璃板的成形方法,通过以不同的加压力对玻璃板的玻璃中央部和玻璃外周部进行冲压成形,能够抑制加压力低的玻璃中央部的面品质下降。
(2)根据(1)所述的玻璃板的成形方法,其特征在于,具有向配置于所述合模方向的前方的第1成形模与所述玻璃板之间供给负压来使所述玻璃板吸附于所述第1成形模的工序。
根据该玻璃板的成形方法,能够利用负压使玻璃板吸附于第1成形模,从而能够将玻璃板更可靠地并且高速地成形为所希望的形状。
(3)一种玻璃板的成形方法,加热玻璃板来成形为所希望的形状,其特征在于,具有如下工序:
将所述玻璃板夹在一对成形模之间;
从所述一对成形模中的一个成形模对所述玻璃板向合模方向赋予0.1MPa以下的加压力,而将从玻璃中央部的外周到所述玻璃板的外周缘之间的环状的玻璃外周部夹入所述一对成形模之间,来在所述玻璃外周部的内周侧,在配置于所述合模方向的前方的第1成形模与所述玻璃板之间划分出空间,其中,所述玻璃中央部相比于所述玻璃板的外周缘靠内侧;以及
向在所述玻璃板与所述第1成形模之间划分出的所述空间供给负压,来使所述玻璃板吸附于所述第1成形模。
根据该玻璃板的成形方法,实质性地利用真空吸附来进行使玻璃板沿着第1成形模的成形面转印形状的动作。因此,不使玻璃板的板面产生由第2成形模的冲压导致的压痕、褶皱,就能够进行高品质的成形。另外,由于利用真空吸附加工为所希望的形状,因此即使是仅通过冲压成形而困难的复杂的形状,也能够进行高精度且高品质的成形。
(4)根据(3)所述的玻璃板的成形方法,其特征在于,在对所述玻璃板转印曲面形状的所述第1成形模的成形面中的、曲率成为最大的部分的至少一部分设置有吸引孔,从所述吸引孔向所述空间供给负压。
根据该玻璃板的成形方法,玻璃板与成形面之间的间隙,伴随着负压的供给,而朝向曲率成为最大的部分缓缓地消失,玻璃板和成形面在两者之间不残留间隙地被紧贴。
(5)根据(3)或(4)所述的玻璃板的成形方法,其特征在于,所述一对成形模在任一个成形模设置有突起部,在另一个成形模设置有与所述突起部对应的凹状的成形面,
在所述突起部和所述成形面的对应的位置,所述突起部的曲率小于所述成形面的曲率。
根据该玻璃板的成形方法,在玻璃板被突起部的倾斜面和成形面的倾斜面夹持时,与玻璃板之间的接触面积变小,玻璃板的变形、移动变得容易。由此,能够使玻璃板忠实地沿着成形面,从而能够提高形状精度。
(6)根据(1)~(5)中的任一项所述的玻璃板的成形方法,其特征在于,具有向配置于所述合模方向的后方的第2成形模与所述玻璃板之间供给正压来将所述玻璃板按压于配置于所述合模方向的前方的第1成形模的工序。
根据该玻璃板的成形方法,玻璃板的玻璃中央部被挤压于第1成形模,因此能够将玻璃板更可靠地且高速地成形为所希望的形状。
(7)根据(1)~(6)中的任一项所述的玻璃板的成形方法,其特征在于,所述玻璃板的成形通过加热所述玻璃板而使所述玻璃板的粘度成为5.94×10
根据该玻璃板的成形方法,通过将玻璃板设为成形性优异的粘度,而向成形模的贴合变好,从而能够很快地成形为所希望的形状。
(8)根据(1)~(7)中的任一项所述的玻璃板的成形方法,其特征在于,所述玻璃板的成形后的玻璃板成形体的相较于设计形状的面内形状偏差为0.3mm以内。
根据该玻璃板的成形方法,能够得到形状精度高的玻璃板成形体。
本申请是基于2019年2月8日申请的日本专利申请(专利申请2019-21562)作出的,其内容作为参照引用在本申请中。
附图标记说明
11…预热台;13…成形台;15…冷却台;17、17A…玻璃板;17a…外周缘;23、23A…下模(第1成形模);25、25A、25B、25C…上模(第2成形模);27…腔室;35…上部加热器(升温用加热部);36…灯加热器;41…热扩散板;43…下部加热器(升温用加热部);51、53、55…隔热框体;63A、63B…模搬运部;65…热扩散板;67…上部加热器(保温用加热部);73…热扩散板;75…下部加热器(保温用加热部);81…热扩散板;83…上部加热器(降温用加热部);91…热扩散板;93…下部加热器(降温用加热部);100…成形装置;111、111A…成形面;113、113A…突起部;113a…倾斜面;115…吸引孔;121…玻璃中央部;121a…中央部外周;123…玻璃外周部;125…气体喷出孔;131…下模(第1成形模);135…上模(第2成形模);141…第1成形线(成形线);143…第2成形线(成形线)。
- 玻璃板的成形方法、及玻璃板的成形装置
- 玻璃板的成形方法、及玻璃板的成形装置