一种智能磁悬浮高速运输装置
文献发布时间:2024-04-18 19:44:28
技术领域
本发明涉及智能控制以及优化算法领域,具体涉及一种智能磁悬浮高速运输装置。
背景技术
21世纪以来,随着社会发展和人们对高速度和效率的追求,技术引起了大众广泛关注和学术界的深入研究,目前国内外对磁悬浮技术的利用主要体现在轨道交通领域,而在货物运输领域运用较少。
磁悬浮列车采用电磁力代替接触力实现支撑、牵引和制动,突破了黏着极限的限制,更适用于高速运行。目前磁悬浮技术主要包括永磁悬浮、电磁悬浮、电动悬浮以及超导钉扎悬浮。永磁悬浮技术原理简单,但由于固有的不稳定性限制了其应用,电磁悬浮与电动悬浮技术应用已经有较高的成熟度与可靠度,高温超导钉扎悬浮起步较晚,正处于实验室研究和工程化样车研发阶段。采用电磁悬浮技术实现货物的运输,基于电磁铁和铁磁轨道之间产生的吸引力来实现悬浮,目前电磁悬浮已应用于多条线路,表明了该系统技术的可靠性。
传统的货物运输方式可以实现对运输物中违禁物的检测识别,并且能够实现重量检测,但是对于货物运输移动,其还依赖于传统的皮带等运输方式,而电磁悬浮目前还很少运用于实际运输中,并且针对该运输环境,对货物运输过程无法实现自动控制与优化,货物运输过程、货物到达目的地后如何缓冲停下,这都需要人力参与。而相对于传统的货物运输方式,本发明提供的磁悬浮运输方式能够提高货物运输效率以及提高货物运输过程中的安全性。
发明内容
发明目的:针对背景技术中指出的问题,本发明公开了一种智能磁悬浮高速运输装置,通过磁悬浮技术实现货物的高效运输,该运输系统具有智能预警、智能分类以及高速运输等特点,保证货物运输安全的同时,提高单位时间内货物的运输量。
技术方案:本发明提供了一种智能磁悬浮高速运输装置,包括运输物检测系统、报警系统、重量检测装置、智能分类系统、磁悬浮运输系统以及调控模块;
所述运输物检测系统包括X光机以及违禁物数据库,能够将X光机成像与违禁物数据库进行对比,当系统识别结果为违禁物时,则将该运输物的相关数据传输到报警系统进行处理;当系统识别结果为非违禁物时,则将运输物传送到重量检测装置上进行称重,其对每一件运输物进行称重,并记录下每件运输物的重量信息,传输到智能分类系统;所述智能分类系统根据重量检测装置传输的信息,对运输物进行智能分类,先分批次,再对同一批次中的运输物进行排序,同一批次中重量相同或误差在一定范围内的物品为一批次,分批次进行运输;
所述磁悬浮运输系统包括磁悬浮轨道、驱动电流,移动挂钩;所述磁悬浮轨道通过所述驱动电流提供电磁感应力,磁悬浮轨道上设置有随磁悬浮轨道移动的多排移动挂钩;同一组并进行排序过的运输物通过移动挂钩在所述磁悬浮轨道上移动,所述磁悬浮运输系统中还设置有运输速度优化模型,以运输距离、运输物重量、驱动电流以及运输物总数为输入,以最小化运输总时长,即最优运行速度为目标函数,利用优化的海洋捕食者算法IMPA根据运输物的重量,对每组运输物的运输速度进行寻优:
其中,T表示运输总时长,S表示运输距离,G
所述优化的海洋捕食者算法IMPA在高速度比、等速度比、低速度比三阶段对MPA算法进行改进,在高速度比阶段猎物执行差分演化;在等速度比阶段引入均匀随机波动概率pf与波动算子f同时波动并行架构,低速度阶段实施反向学习,引入柯西镜像变异缔造柯西镜像变异捕食者;
所述调控模块通过磁悬浮运输系统中运输速度优化模型寻优结果,对驱动电流进行调节,使运输物在达到最佳运输速度后开始匀速运动。
进一步地,还包括减速点预测模块,所述减速点预测模块根据获取的最优运行速度、运输距离构建IMPA-MLR减速点预测模型,利用优化的海洋捕食者算法IMPA优化MLR多元线性回归预测模型,得到最优的减速点预测模型,通过最优的减速点预测模型预测得到运输物在运输多长时间后开始减速,使运输物平缓到达终点;
所述调控模块根据减速点预测模型预测的运输物在具体运输时长后开始减速的时间点,通过对驱动电流进行调节,使运输物在达到具体运输时长后开始减速运动。
进一步地,所述违禁物数据库主要包括爆炸物品、腐蚀物品、毒性物体、可燃气体、易燃液体、放射性物品、管制刀具、军械警械、火柴火机以及磁性物品八类。
进一步地,优化的海洋捕食者算法IMPA根据运输物的重量,对每组运输物的运输速度进行寻优的具体实现过程如下:
41)选取最优适应度猎物个体担任顶级捕食者E,并初始化海洋环境,初始化公式如下所示:
P
其中,P
42)以当前迭代次数t与最大迭代次数t
43)高速度比阶段,t<t
其中,p为常数,取0.5;R为取值范围[0,1]的均匀随机数向量;P
44)MPA的并行架构由等速度比阶段,即t
其中,p为常数,取0.5;CF为自适应参数;R
45)低速度比阶段,即t>2t
46)涡流或鱼类聚集装置FADs会影响海洋捕食者的行为,被视作局部最优,FADs效应由取值为0.2的扰动概率因子p
其中,U为随机生成二进制向量的二进制数组;r为[0,1]范围内的均匀随机数;P
进一步地,在高速度比、等速度比、低速度比三阶段对MPA算法进行改进,改进步骤如下所示:
1)对高速度比阶段,t<t
任选3只异维个体
其中,F为差分变异因子;
通过原始个体P
其中,d
选取原始个体P
2)等速度比阶段并行架构的正余弦波动
高速度比阶段结束后,引入均匀随机波动概率pf与波动算子f同时波动并行架构,生成灵活性更高的波动猎物
其中,r
3)低速度阶段捕食者的柯西镜像变异,对进入低速度比阶段的波动捕食者
b=(1-t/tmax)
其中,ub与lb分别表示对应解空间的上下界,rand为服从(0,1)标准均匀分布的随机数矩阵;b为反向学习伪信息交流系数;
进一步地,所述减速点预测模块通过运输距离、最佳运输速度构建IMPA-MLR减速点预测模型,得到运输物在运动多长时间后开始减少,使运输物可以平缓到达终点,所述IMPA-MLR减速点预测模型,构建过程如下:
61)建立MLP多元线性回归预测模型,模型一般形式如下所示:
y
式中,b
62)计算随机误差,计算公式如下所示:
63)采用优化的海洋捕食者算法IMPA对MLR预测模型的回归系数进行寻优。
有益效果:
本发明采用磁悬浮技术进行货物运输,根据货物重量调整驱动电流,使运输物以最佳速度运动,保证了单位时间能货物运输量,有效节约了时间成本;系统包含减速点预测模型,当货物运输到减速点是进行减速运行,避免了货物由于高速运动产生碰撞,进而导致货物受损。本发明采用的改进的捕食者算法IMPA,不仅能够通过运输物的重量,得到货物运输的最佳速度,同时可以优化减速点预测模型,能够使货物在最佳时刻开始减少,有效避免了货物由于高速运动产生碰撞,进而导致货物受损。另外本发明采用的智能分类系统,能够根据货物的重量进行分类,实现了分批、分组运输,有效提高了运输效率。
附图说明
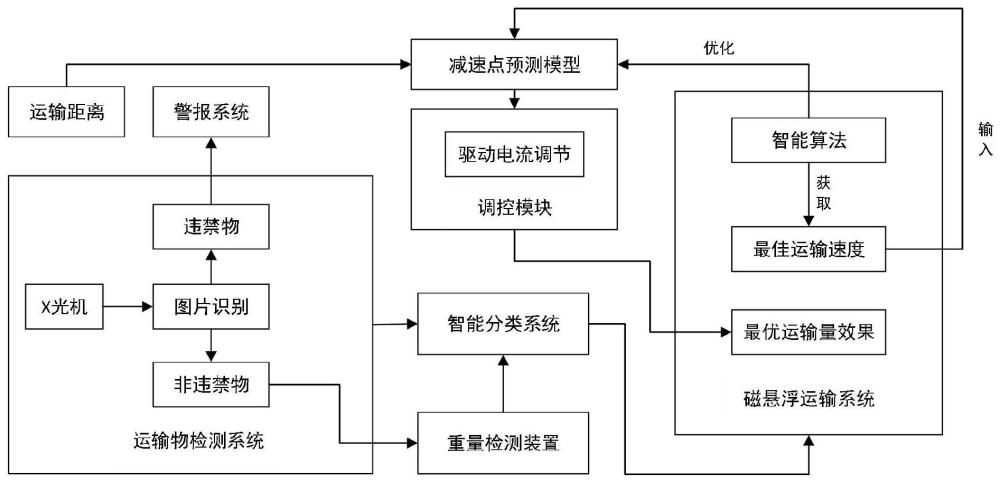
图1为本发明总体框架图;
图2为智能电磁弹射高速运输装置示意图;
图3为改进的海洋捕食者算法AMPA流程图;
图4为减少电预测结果图;
图5为运输时间对比图。
具体实施方式
下面结合附图对本发明作进一步详细说明。
通过附图1所示,本发明提供了一种智能磁悬浮高速运输装置,包括运输物检测系统、报警系统、重量检测装置、智能分类系统、磁悬浮运输系统、减速点预测模型以及调控模块。
运输物检测系统包括X光机以及违禁物数据库,能够将X光机成像与违禁物数据库进行对比,当系统识别结果为违禁物时,则将该运输物的相关数据传输到报警系统进行处理;当系统识别结果为非违禁物时,则将运输物传送到重量检测装置上进行称重;违禁物数据库主要包括爆炸物品、腐蚀物品、毒性物体、可燃气体、易燃液体、放射性物品、管制刀具、军械警械、火柴火机以及磁性物品八类。注意:目前运输物检测系统为常规技术,如高铁站、飞机场等场合均已使用运输物检测系统,通过X光机成像能够对货物进行检测,此处不做进一步赘述。
报警系统能够对从运输物检测系统获取的违禁物数据进行二级处理,将违禁物分为一般违禁物与公安违禁物两种。对于一般违禁物,系统将信息传输给工作人员,由工作人员进行处理;对于公安违禁物,系统会进行报警,进行多级联动处置。
重量检测装置会对每一件运输物进行称重,并记录下每件运输物的重量信息,传输到智能分类系统。智能分类系统根据重量检测装置传输的信息,对运输物进行智能分类,先分批次,再对同一批次中的运输物进行排序,同一批次中重量相同或误差较小的物品为一组,分组进行运输。
磁悬浮运输系统包括磁悬浮轨道、驱动电流、移动挂钩以及运输速度优化模型;磁悬浮轨道通过所述驱动电流提供电磁感应力,磁悬浮轨道上设置有随磁悬浮轨道移动的多排移动挂钩;同一组并进行排序过的运输物通过移动挂钩在所述磁悬浮轨道上移动。以运输距离、运输物重量、驱动电流以及运输物总数为输入,以最小化运输总时长,即最优运行速度为目标函数,利用优化的海洋捕食者算法IMPA根据运输物的重量,对每组运输物的运输速度进行寻优:
其中,T表示运输总时长,S表示运输距离,G
通过附图3所示,优化的海洋捕食者算法IMPA在高速度比、等速度比、低速度比三阶段对MPA算法进行改进,在高速度比阶段猎物执行差分演化;在等速度比阶段引入均匀随机波动概率pf与波动算子f同时波动并行架构,低速度阶段实施反向学习,引入柯西镜像变异缔造柯西镜像变异捕食者。
1.1)选取最优适应度猎物个体担任顶级捕食者E,并初始化海洋环境,初始化公式如下所示:
P
其中,P
1.2)以当前迭代次数t与最大迭代次数t
1.3)高速度比阶段,t<t
其中,p为常数,取0.5;R为取值范围[0,1]的均匀随机数向量;P
1.4)MPA的并行架构由等速度比阶段,即t
其中,p为常数,取0.5;CF为自适应参数;R
1.5)低速度比阶段,即t>2t
1.6)涡流或鱼类聚集装置FADs会影响海洋捕食者的行为,被视作局部最优,FADs效应由取值为0.2的扰动概率因子p
其中,U为随机生成二进制向量的二进制数组;r为[0,1]范围内的均匀随机数;P
进一步地,在高速度比、等速度比、低速度比三阶段对MPA算法进行改进,改进步骤如下所示:
1)对高速度比阶段,t<t
任选3只异维个体
其中,F为差分变异因子;
通过原始个体P
其中,d
选取原始个体P
2)等速度比阶段并行架构的正余弦波动
高速度比阶段结束后,引入均匀随机波动概率pf与波动算子f同时波动并行架构,生成灵活性更高的波动猎物
其中,r
3)低速度阶段捕食者的柯西镜像变异,对进入低速度比阶段的波动捕食者E
b=(1-t/tmax)
其中,ub与lb分别表示对应解空间的上下界,rand为服从(0,1)标准均匀分布的随机数矩阵;b为反向学习伪信息交流系数;
调控模块通过磁悬浮运输系统中运输速度优化模型寻优结果,对驱动电流进行调节,使运输物在达到最佳运输速度后开始匀速运动。
减速点预测模型能够防止运输物由于高速运动,发生碰撞而受损,通过运输距离、最佳运输速度构建IMPA-MLR减速点预测模型,得到运输物在运动多长时间后开始减速,使运输物可以平缓到达终点,调控模块根据减速点预测模型预测的运输物在具体运输时长后开始减速的时间点,通过对驱动电流进行调节,使运输物在达到具体运输时长后开始减速运动。IMPA-MLR减速点预测模型构建过程如下:
2.1)建立MLP多元线性回归预测模型,模型一般形式如下所示:
y
式中b
2.2)计算随机误差,计算公式如下所示:
2.3)采用改进的海洋捕食者算法IFOA对MLR预测模型的回归系数进行寻优。
通过附图4所示,以100米长的运输轨道为例,重量在25±2kg的运输物平均在运动7.51秒后开始减速;重量在50±2kg的运输物平均在10.84秒后开始减速;重量在75±2kg的运输物平均在14.02秒后开始减速;预测准确率高,在运输过程中,只要少数运输物由于惯性发生轻微碰撞,不会造成物件的损坏。
通过附图5所示,以100米长的运输轨道为例,传统的运输方式运输一组物件平均耗时为29.06秒,而本发明的磁悬浮运输方式运输一组物件平均耗时为13.31秒,运输时间有明显降低,运输效率高。
上述实施方式只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所做的等效变换或修饰,都应涵盖在本发明的保护范围之内。