一种半自动机械防摔助行车
文献发布时间:2023-06-19 09:41:38
技术领域
本发明涉及机械领域,具体地,涉及一种半自动机械防摔助行车,尤其适用于老人等腿脚不便的人行走时使用。
背景技术
市场上现有的防摔倒机械装置,主要是基于助走装置为使用者提供支撑点。在临界摔倒状态下,为使用者提供可握持的支架或扶手,利用支架的稳定结构,减小由于使用者摔倒产生的前倾作用力,为使用者提供足够的缓冲时间,从而调整行走姿态,防止摔倒。
市场上较为成熟的防摔倒装置为充分确保使用者安全,支架与地面均避免采用车轮,从而增大摩擦力,能够在使用者摔倒的临界情况下为老人提供足够的支撑反力,从而确保使用者不会摔倒。
实际使用情况下,使用者一般需要将整个装置抬起或者直接推动装置在地面滑行。由于需要助走装置的人行动一般较为困难,所以两种方式对于实际的使用者来说操作难度都较大,结构有待优化。
目前市场上已有新型助行器带车轮,但采用刹车制动。老人摔倒时反应较慢,车轮与地面之间的摩擦较小,极有可能老人尚未来得及进行刹车制动,便已造成翻车,从而造成伤害,存在较大的安全隐患。
因此,需要一种能够实现自动防摔的装置,为老人提供足够的反应时间,从而避免造成伤害。
发明内容
对现有技术中的缺陷,本发明的目的是提供一种半自动机械防摔助行车。
根据本发明提供的一种半自动机械防摔助行车,包括支架1、刹车轮组件3和紧急制动装置5。支架下部四个支撑点。
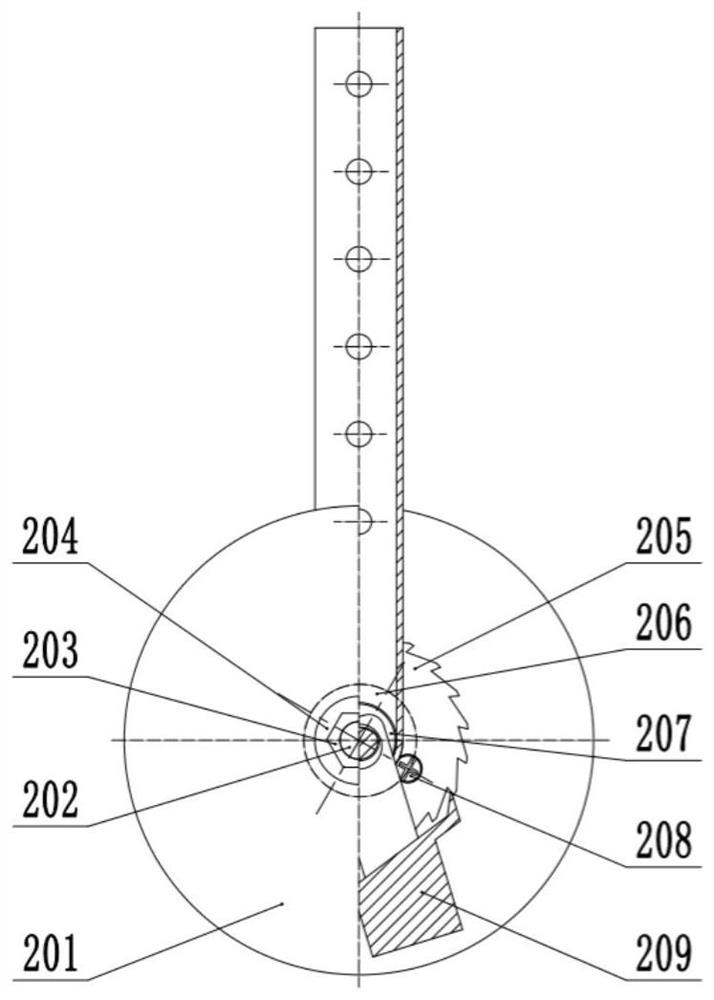
所述刹车轮组件通过刹车轮上部底板与支架前支撑杆连接,紧急制动装置由倒T形支架206、两个车轮201、两个棘轮205、连接轴202、摆锤209及固定垫圈207等组成。
优选地,棘轮205通过紧密螺钉208固定在车轮201上,并与车轮201一起固定在连接轴202的两端。两端固定车轮201与棘轮205的连接轴202穿过倒T形支架206再通过弹销将紧急制动装置与支架后支撑杆4连接。
优选地,摆锤209由吊耳301、锁片302及下部重锤303三部分焊接而成。重锤密度大,吊环密度小,且锁片采用磁性材料,宽度可同时与左右两棘轮配合。摆锤209穿过连接轴202在固定垫圈207的作用下定位于连接轴中间轴段并能够绕连接轴自由转动,且水平方向运动受到限制。
优选地,连接轴202整体为对称结构,总体结构分为中间轴段、轴肩、车轮段、螺纹段。中间轴段截面上部为椭圆弧,下部为圆弧。轴肩对称分布在中间轴段两端,便于摆锤209定位。
优选地,与支架后支撑杆4通过弹销连接的倒T字形支架206,底部开槽,T字形节点处开方孔。摆锤209穿过倒T字形支架206,通过吊耳悬挂在连接轴202上,并从方孔处向外引出。
优选地,穿过倒T字形支架206的轴段部分通过凸出的轴肩与固定垫圈207内孔形成过盈配合,固定垫圈207外孔与倒T形支架206短管内孔形成间隙配合,从而将连接轴202轴心定位于倒T字形支架206短管轴心位置。
优选地,刹车轮选用万向刹车轮,脚踩踏板,同时实现刹车、转向锁定。
优选地,支架材料选用铝合金。
与现有发明相比,本发明的有益效果在于:
1.本发明,采用纯机械结构,无需能源驱动,可持续使用。
2.本发明,利用紧急制动装置,依靠惯性,当发生摔倒时,摆锤向上抛起,带动锁片卡住棘轮,实现装置锁定,从而实现车轮的锁定。紧急制动装置结构简单,反应迅速,有效地提高了安全性。
附图说明
图1为本发明结构示意图
图2为本发明紧急制动装置原理图
图3为本发明紧急制动装置正常状态结构示意图
图4为本发明紧急制动装置工作状态剖视图
图5为本发明紧急制动装置摆锤结构示意图
图6为本发明紧急制动装置摆锤部分偏心结构左视图
图7为本发明紧急制动装置连接轴正视的结构示意图
图中:1支架、2前支撑杆、3刹车轮组件、4后支撑杆、5紧急制动装置、201车轮、202连接轴、203固定螺母、204垫片、205棘轮、206倒T形支架、207固定垫圈、208紧密螺钉、209摆锤、301吊耳、302锁片、303重锤
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1-7所示,本发明提供一种新型助行车:一种半自动机械防摔助行车,包括支架1,支架1底部具有四个支撑点,两个前支撑点通过刹车轮上部底板与支架前支撑杆2连接,紧急制动装置5通过弹销固定在后支撑杆4上,高度可调节。刹车轮为万向轮,脚踩制动。紧急制动装置5,包括摆锤209、棘轮205、车轮201、连接轴202等。棘轮205通过紧密螺钉208固定在车轮202上,连接轴202穿过倒T型支架206通过螺纹连接将车轮201与棘轮205固定在倒T形支架206两端,摆锤209穿过连接轴202,布置在连接轴202轴段处,且在重力的作用下,摆锤209吊耳内孔上边缘紧贴连接轴202中间轴段上边缘,形成偏心结构,分布在摆锤左右的固定垫圈207将连接轴202轴心固定在倒T型支架206短管轴心处,并限制摆锤209水平方向的运动。
本发明的操作步骤为:
正常行走时,手扶支架,推动助行车向前行走,刹车轮处于正常工作状态,可实现任意方向转向。紧急制动装置处于正常工作状态,摆锤209竖直悬挂,锁片折弯方向与前进方向一致,且锁片低于棘轮205下部切线边缘,不与棘轮205发生干涉。
将要发生摔倒时,使用者由于惯性发生前倾,助行车整体产生一个向前的加速度,紧急制动装置由正常工作状态转为制动状态。摆锤209中的重锤结构由于惯性且质量较大,向上抛起,锁片折弯部分高于棘轮205下部切线边缘,与棘轮205外径所包含的范围发生干涉,并卡住棘轮205,随之锁定与棘轮205相连接的车轮201,从而实现助行车后轮抱死,为使用者提供缓冲时间。紧急制动装置5发挥作用后,使用者脚踩前刹车轮,实现前轮刹车与转向锁死,从而实现装置整体锁定,装置整体由滚动转变为滑动,为使用者提供足够支撑,实现防摔功能。
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,凡是本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种半自动机械防摔助行车
- 一种用于下肢康复训练的防摔助行车以及康复训练方法