一种基于FPGA的EMD运动检测系统
文献发布时间:2023-06-19 09:46:20
技术领域
本发明涉及视觉检测技术领域,主要涉及一种基于FPGA的EMD运动检测系统。
背景技术
EMD运动检测模型是一种基于昆虫复眼体积小、视场大、灵敏度高的特点,以嵌入式系统FPGA为开发环境,设计依据生物视觉机制的EMD模型基本原理的运动检测模型,实现全视角运动物体的方向和速度检测。近年来,科研人员对该系统实现模拟信号采集提出了多种设计方案,如CN104980156A、CN210514976U都公开了一种基于FPGA的ADC同步采集系统,此系统仅限于AD采集中高频信号或低频信号,并无包含低频到高频的全信号多通道采集和EMD的运动检测功能。如邢凯、李彬华等在《光学技术》期刊中发表的基于FPGA的运动目标实时检测跟踪算法及其实现技术,在FPGA开发板上构建了一个彩色视频图像中运动目标检测跟踪系统;该设计固定背景差分法对目标运动速度无限制,但当使用帧差法对快速运动目标进行有效的检测时,应使目标的帧差间距大于3.2像素。该设计对运动背景要求较高,使用图像采集的方式采集模拟信号,且运动检测并无使用EMD模型。如KoljKuehnlenz、吴海燕等在《中国图像图形学报》期刊中发表的生物Reichardt运动检测器和感受域模板的FPGA设计与实现,在FPGA平台上实现了基于苍蝇视觉系统的6个感受域模板,用以实现简单自身运动方式的估算,如相机自身的平移旋转相关的算法,此设计在设计原理上使用FPGA实现EMD模型与本发明一致,但在平台搭建和功能实现上有实质性的区别。本发明基于红外成像设备具有工作距离远、隐蔽性能强、可昼夜工作等优点在军事和民用领域可广泛应用的特点设计采用红外光电感受器用作模拟信号采集设备,能适应不同背景环境,检测误差小,实时性好。利用光电二极管和高速多通道ADC模块采集光流场信息,信号采集的采样率更高,信息传输更加高速、精确,同时实现360度全视角范围的检测。
发明内容
发明目的:本发明提供了一种基于FPGA的EMD运动检测系统,基于ADC高速多通道采集系统子板和红外光电感受器等采集电路的设计以及FPGA信号处理平台等,实现了全视角一维运动物体方向和速度高速精确检测,克服了以往EMD运动检测系统不足,实现采样率高,检测效率高,检测视角大,动态范围大,同步性好等特性,具有广泛的应用前景。
技术方案:为实现上述目的,本发明采用的技术方案为:
一种基于FPGA的EMD运动检测系统,包括FPGA系统信息处理平台、ADC同步信号采集系统子板和红外光电二极管电路子板;所述每相邻两个红外光电二极管组成一对,通过红外光电二极管电路连接至ADC同步信号采集系统子板,将红外光电二极管采集的模拟信号经过ADC模数转换成数据信号传输到FPGA系统信息处理平台,作为EMD运动检测模型的输入;通过EMD运动检测模型对输入信号进行分析,实现具有特定光源运动物体的方向和速度检测。
所述红外光电二极管电路子板包括16个红外光电二极管,所述16个红外光电二极管等角间距分布在圆形集成电路子板的圆周,每相邻两个通道作为一对信号输入,每相邻两个光电二极管根部直线距离为1cm;
所述ADC同步信号采集系统子板包括16个模拟信号采集通道,所述红外光电接收二极管输出端与模拟信号采集通道依次连接;
所述FPGA系统信息处理平台包括基于FPGA设计的EMD运动检测模型。
进一步地,所述EMD运动检测模型设计原理如下:
步骤S1、采用MATLABFDAtool生成并量化滤波器系数,设计FIR低通滤波器;
采用MATLAB设计滤波器系数,在Quartus软件中利用IP核直接调用滤波器系数来生成所需的低通滤波器;调用FDAtool工具箱来设计一个17阶、汉明窗函数低通FIR滤波器;对FIR滤波器选用全并行分布式算法结构,直接加载MATLAB中设计好的滤波器系数;
步骤S2、基于FPGA系统信息处理平台设计乘法器;
设计一个12*25位的二进制数据乘法器,调用Quartus中LPM_MULT乘法器IP核,并例化该乘法器模块到主程序中,所述乘法器包括两个相同的子乘法器;
步骤S3、基于FPGA系统信息处理平台设计减法器;
将同一采样时钟信号下采集的到两路乘法器输出进行减法运算,减法器通过Quartus中LPM_ADD_SUB减法器IP核设计生成,输出37位带符号二进制数据,作为整个EMD模型的方向检测结果;输出数据的正负值反应接收到两路输入数据的先后顺序,作为探测运动物体的一维方向的判断依据。
进一步地,所述ADC同步信号采集系统子板通过转接板转接至FPGA系统信息处理平台;各通道时钟信号连接到FPGA系统信息处理平台的时钟引脚上,由FPGA系统时钟分频提供时钟信号。
进一步地,所述ADC同步信号采集系统子板包括衰减电路、AD8065运算放大器及其电路、供电电路;采用单电源供电,并行同步采集数据频率为1Hz-50MHz;输入信号电压范围为-5V~+5V。
进一步地,所述ADC同步信号采集系统子板内置高性能采样保持放大器和基准电压源,采用舵机差分流水线架构,在工作温度范围内实现无失码。
进一步地,所述红外光电二极管的入射角范围为-20°~+20°,对特定波长的光信号接收转换为0V~5V的电压信号;所述光电二极管的供电电压为+5V,响应波峰为950nm。
有益效果:本系统具备以下优点:
本发明利用光电感受器和高速多通道ADC模块采集光流场信息,信号采集的采样率更高、信息计算更加高速,精确、检测速度和视角范围更大。利用FPGA信息处理平台对多通道同步采集的运动时间信息进行EMD模型计算,可解决对高速移动物体的速度和方向的精确检测,对EMD模型在无人机、机器人视觉探测领域的研发与应用有实质性的参考价值,具有广泛的适用性。
附图说明
图1是本发明提供的系统设计流程示意图;
图2是本发明提供的ADC同步信号采集系统时序图;
图3是本发明提供的EMD运动检测模型设计流程图;
图4是本发明提供的EMD运动检测模型中FIR低通滤波器幅频响应图;
图5是本发明提供的EMD运动检测模型结构设计原理图。
具体实施方式
下面结合附图对本发明作更进一步的说明。
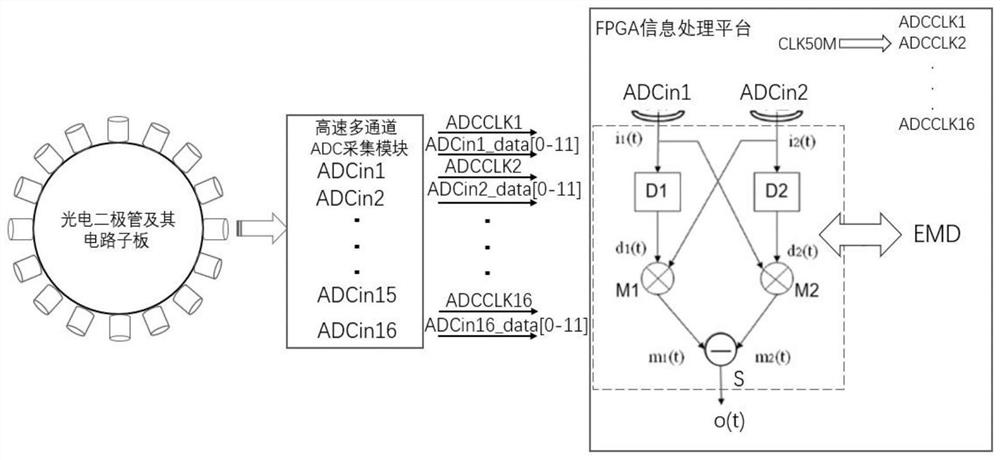
如图1所示的一种基于FPGA的EMD运动检测系统,包括FPGA系统信息处理平台、ADC同步信号采集系统子板和红外光电二极管电路子板;所述每相邻两个红外光电二极管组成一对,通过红外光电二极管电路连接至ADC同步信号采集系统子板,将红外光电二极管采集的模拟信号经过ADC模数转换成数据信号传输到FPGA系统信息处理平台,作为EMD运动检测模型的输入;通过EMD运动检测模型对输入信号进行分析,实现具有特定光源运动物体的方向和速度检测。
所述红外光电二极管电路子板包括16个红外光电二极管,所述16个红外光电二极管等角间距分布在圆形集成电路子板的圆周,每相邻两个通道作为一对信号输入。
所述ADC同步信号采集系统子板包括16个模拟信号采集通道,所述红外光电接收二极管输出端与模拟信号采集通道依次连接,每相邻两个光电二极管根部间距1cm;
所述FPGA系统信息处理平台包括基于FPGA设计的EMD运动检测模型。
所述红外光电二极管作为模拟信号的采集系统,16个红外光电二极管的输出端接在ADC的16个采集模拟信号采集通道上,光电二极管的入射角范围-20°~+20°,对特定波长的光信号接收转换为0V~5V的电压信号,光电二极管供电电压+5V,响应波峰为950nm。红外光电二极管对光信号的响应近似为正弦波,其输入给ADC采集子板为0V~+5V的正弦模拟信号电压。
所述ADC同步信号采集系统子板包括衰减电路、AD8065运算放大器及其电路、供电电路;采用单电源供电,并行同步采集数据频率为1Hz-50MHz;输入信号电压范围为-5V~+5V将其转换为12位二进制数据传输给FPGA信息处理平台,作为EMD模型的信号输入。ADC同步信号采集系统子板通过转接板转接至FPGA系统信息处理平台;各通道时钟信号连接到FPGA系统信息处理平台的时钟引脚上,由FPGA系统时钟分频提供时钟信号。
ADC信号采集芯片选用AD9226芯片,单个芯片对应一个信号采集通道,每个通道都需要一个信号采集时钟AD_CLK,AD_CLK是由FPGA系统时钟50MHz通过锁相环PLL分频得到的1.6MHz采样时钟,此AD芯片一个时钟周期采集一个数据,只要提供时钟信号就可进行数据采集,采集时序如图2。
本系统选用的AD芯片的最高采样率达到50MHz,每通道模拟信号量化位宽12位,每一个数据位需要ADC的一个信号输出线,同时占用FPGA的一个IO口,每个通道信号需要占用FPGA的12个数据位IO口和1个数据采集时钟IO口。
所述ADC同步信号采集系统子板的衰减电路对于AD采集芯片选用的是AD9226,其电压输入范围为1V~3V,需要满足电压输入范围-5V~+5V就需要一个衰减电路,其转换公式为Vout=(1/5)Vin+2,当Vin=-5v时,Vout=1V;当Vin=5V时,Vout=3V;转换为数值信号后,将以上转换公式反向运算,将数字信号进行放大,即可得到输入电压的真实数值。
所述ADC同步信号采集系统子板的运算放大器,采用单路电压反馈型放大器AD8065,提供FET输入,采用每个放大器6.4mA的典型电源电流,能够驱动高达30mA的负载电流。
所述基于FPGA设计的EMD运动检测模型如图3所示,结构设计原理如图5所示。
下面以一对EMD模型为例,说明本设计的EMD信息处理机制,其余七对EMD模型同理可得。
步骤S1、采用MATLABFDAtool生成并量化滤波器系数,设计FIR低通滤波器。
采用MATLAB设计滤波器系数,在Quartus软件中利用IP核直接调用滤波器系数来生成所需的低通滤波器;调用FDAtool工具箱来设计一个17阶、汉明窗函数低通FIR滤波器;对FIR滤波器选用全并行分布式算法结构,直接加载MATLAB中设计好的滤波器系数;采样频率2KHz,截止频率0.6KHz。利用FDAtool设计完滤波器后,将原系数量化为16位,导出到命令行串口,使用函数dlmwrite将滤波器系数写入到TEST.txt文件中。对FPGA直接采用IP核来设计FIR低通滤波器,本设计对FIR滤波器选用全并行分布式算法结构,直接加载MATLAB中设计好的滤波器系数(TXT格式),以便于模块的通用性和滤波器系数的继承性,生成滤波器幅频响应图如图4。
FIR滤波器设计主要实现滤波和延迟的功能,滤波器IP核内部是一个乘累加运算,累加计算的次数由滤波器阶数决定,本设计滤波器阶数为17阶,滤波器时钟周期为系统采样时钟周期1.6MHz,延时效果达到26个系统时钟周期。滤波器在Quartus中设计原理如图1中D1、D2。经过ADC高速采集模块转换后的12位数据信号,通过基于FPGA信号处理平台的FIR低通滤波器滤波后得到25位数据信号。
步骤S2、基于FPGA系统信息处理平台设计乘法器;
本模块设计一个12*25位的二进制数据乘法器,调用Quartus中LPM_MULT乘法器IP核,并例化该乘法器模块到主程序中。在EMD模型中两路通道需要两个乘法器,故此乘法器在实际应用中被调用两次。乘法器模块在Quartus中设计原理图如图1中M1、M2。
步骤S3、基于FPGA系统信息处理平台设计减法器;
本模块是EMD模型的总输出模块,将同一采样时钟信号下采集的到两路乘法器输出进行减法运算,减法器通过Quartus中LPM_ADD_SUB减法器IP核设计生成,输出37位带符号二进制数据,为整个EMD模型的方向检测结果。通过其正负值可直接反应接收到两路输入数据的先后顺序,类比两个光感受器感应到光源信号的顺序,作为探测运动物体的一维方向的判断依据。减法器模块在Quartus中设计原理图如图1中S。
对于每个通道的光流场模拟信号采集,ADC采集模块输出可近似为正弦输出响应,检测到两路采集通道邻近波峰的时间间隔即为移动物体的运动时间,再除以相邻光电二极管距离间隔1cm,可计算出运动速度,即为EMD模型的速度检测结果,可检测0~100m/s的运动速度。
在Quartus中设计EMD系统结构设计原理图如图5所示。
本发明完成了一种基于FPGA的EMD运动检测设备和方法。在软硬件设计上采用EMD运动检测原理,可实现全视角高度移动物体的运动信息的采集和处理,得到准确的速度、方向信息。本发明具有系统集成性高,体积小,采样率高,检测效率高,检测视角大,动态范围大,同步性好,成本低等特点。在信号采集与处理,运动物体速度方向检测等方面有较强的实用性,可广泛应用于无人机、机器人等视觉处理领域。
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种基于FPGA的EMD运动检测系统
- 一种基于FPGA的通用工业运动控制系统及基于该运动控制系统的控制方法