一种磁流变阻尼器建模方法
文献发布时间:2023-06-19 09:58:59
技术领域
本发明涉及工程技术与材料科学领域,尤其是涉及一种磁流变阻尼器建模方法。
背景技术
作为工程结构振动控制的重要装置,磁流变阻尼器近年来得到了广泛的应用与研究。磁流变阻尼器的工作机制在于输入电流产生的磁场对磁流变液流变学性能的影响,即通过改变输入电流的大小来控制磁流变阻尼器的动态阻尼特性。磁流变液一般是由微米级高磁导率的颗粒与非磁性的流体以及外加剂组成,具有响应快速、相变特性完全可逆、对温度不敏感等优点。磁流变阻尼器已经在土木、航天、机械等多领域得到广泛应用。
需要注意的是,无论是磁流变阻尼器自身的设计优化还是在工程中的实际应用,都要以精确高效的阻尼力模型为基础。目前,磁流变阻尼器的建模方法主要的分为两类:参数化模型和非参数化模型。其中的非参数化模型主要指采用神经网络、模糊逻辑等方式建立的模型。这类模型本质上是数据驱动的,虽然适用于实际工程中控制算法的电流反算,但对于训练样本数据的质量和数量有较高要求。对于参数化模型,现象学模型是目前磁流变阻尼器最常用的参数化建模方式,其特点是将等效弹簧单元、阻尼单元和滞回单元以串、并联的方式联结,通过参数拟合进行模型参数识别。现象学模型虽然一般可以较好地与实验数据相吻合,但由于识别模型参数的工况依赖性,使其在复杂加载条件下的鲁棒性较差;而且,现象学模型参数众多、计算复杂,不便于工程应用。与非参数化模型相似,现象学模型未能直接关联磁流变阻尼器的构型参数,不便于磁流变阻尼器的设计与优化。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种磁流变阻尼器建模方法。
本发明的目的可以通过以下技术方案来实现:
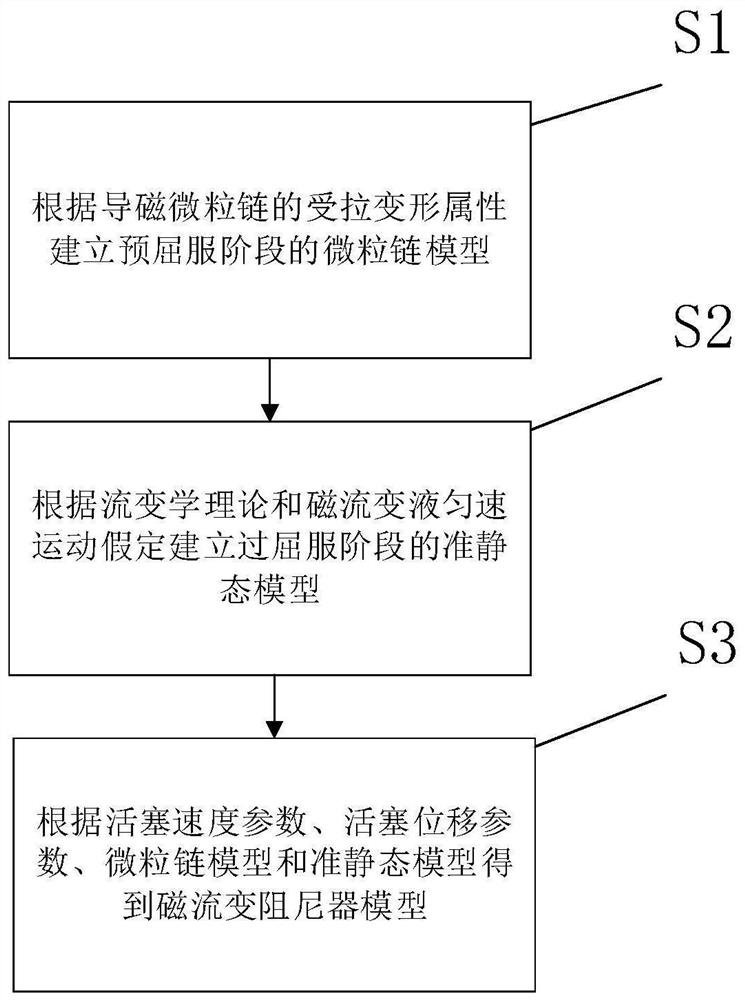
一种磁流变阻尼器建模方法,该方法包括以下步骤:
步骤S1:根据导磁微粒链的受拉变形属性建立预屈服阶段的微粒链模型;
步骤S2:根据流变学理论和磁流变液匀速运动假定建立过屈服阶段的准静态模型;
步骤S3:根据活塞速度参数、活塞位移参数、微粒链模型和准静态模型得到磁流变阻尼器模型。
所述微粒链模型的表达式为:
其中,F
所述微粒链模型由变形控制方程求解得到,所述变形控制方程为:
其中,Δp
求解变形控制方程时使用的边界条件包括加载条件。
所述准静态模型的表达式为:
其中,F
所述准静态模型由运动控制方程和基于Herschel-Bulkley流体的粘结切应力-流速梯度关系方程求解得到。
所述粘结切应力-流速梯度关系方程为:
其中,τ
所述的运动控制方程为:
其中,u
求解运动控制方程时使用的边界条件包括加载条件。
所述磁流变阻尼器模型的表达式为:
其中,F
所述微粒链模型的各个变量与输入电流之间为三次多项式关系,所述准静态模型的各个变量与输入电流之间为三次多项式关系。
与现有技术相比,本发明具有以下优点:
(1)从磁流变阻尼器的物理工作机制出发,建立的动态阻尼力模型对于不同加载条件和输入电流,具有良好的鲁棒性。
(2)突破了依赖于试验条件的传统现象学磁流变阻尼器建模方法,从对预屈服和过屈服阶段不同的工作机制分别建模的角度,建立了一种高效鲁棒的磁流变阻尼力学模型,为磁流变阻尼器的设计优化提供了便利,并为其工程应用提供了有力的理论基础和技术支撑。
(3)微粒链模型和准静态模型组合的磁流变阻尼器模型,其与磁流变阻尼器构型参数直接关联,方便磁流变阻尼器的设计与优化。
附图说明
图1为本发明的流程图;
图2为预屈服阶段微粒链四个典型状态示意图;
图3为微粒链的受拉变形分析图;
图4为过屈服阶段磁流变阻尼器间隙中磁流变液流速分布图;
图5为相同正弦位移加载、不同电流输入下的阻尼力-速度和阻尼力-位移对比图;
图6为相同电流输入、不同正弦位移加载条件下阻尼力-速度和阻尼力-位移对比图;
图7为本发明磁流变阻尼器模型与传统现象学模型的对比图。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
实施例
本实施例提供一种磁流变阻尼器建模方法,如图1所示,包括以下步骤:
步骤S1:根据导磁微粒链的受拉变形属性建立预屈服阶段的微粒链模型;
步骤S2:根据流变学理论和磁流变液匀速运动假定建立过屈服阶段的准静态模型;
步骤S3:根据活塞速度参数、活塞位移参数、微粒链模型和准静态模型得到磁流变阻尼器模型。
1.预屈服阶段的微粒链模型
如图2所示,在整个预屈服阶段从形成到结束的过程,有四个典型状态:状态Ⅰ表示活塞速度为零,此状态也是微粒链刚刚形成的状态;状态Ⅱ表示阻尼力为零的状态,这一状态的阻尼力是活塞两端压强差和微粒链对活塞的拉力共同作用的结果;状态Ⅲ表示微粒链两端压强差为零的状态,此时微粒链表现为一条直线;状态Ⅳ表示预屈服阶段结束的状态,此时微粒链受到的拉力处于临界状态,超过这一状态微粒链即发生断裂,磁流变液产生流动,预屈服阶段结束。
图3所示为微粒链的受力变形分析图,基于此可建立其变形控制方程:
其中,Δp
导出的微粒链模型如下:
其中,F
2.过屈服阶段的准静态模型
当磁流变阻尼器处于过屈服阶段,由导磁微粒形成的微粒链发生断裂,磁流变液开始流动,此时的阻尼力来源于磁流变液流速梯度间的粘结切应力。磁流变阻尼器间隙中磁流变液的流速分布如图4所示。假设其表现为均匀流动状态,则基于流变学的运动控制方程为:
其中,u
为获得过屈服阶段磁流变阻尼器的阻尼力,还需要建立表征磁流变液属性的粘结切应力-流速梯度关系方程,这里采用Herschel-Bulkley模型:
其中,τ
其中,F
由此,得到微粒链模型和准静态模型组合的磁流变阻尼器模型:
其中,F
3.加载条件及输入电流鲁棒性
对于建立的微粒链模型,在对其变形控制方程(1)进行求解时所需的边界条件中包含了加载条件(加载条件指正弦位移加载)的信息;而对于准静态模型,在对其运动方程(3)进行求解所用到的边界条件也包含了加载条件信息。因此本发明建立的基于物理的磁流变阻尼器模型天然的具有加载条件鲁棒性。
另外,为了揭示不同输入电流下磁流变阻尼器模型的鲁棒性,建立了模型各涉及的量与加载电流之间的关系。研究表明,微粒链模型和准静态模型所涉及的各涉及的量与加载电流之间均呈现出一致的三次多项式关系。由此表明磁流变阻尼力模型的电流鲁棒性。
4.模型有效性证明
为了证明所建立模型的有效性,分别采用相同电流、不同加载条件和不同电流、相同加载条件下模型的阻尼力与实验数据进行对比。其中,图5所示为相同正弦位移加载、不同电流输入下的阻尼力-速度和阻尼力-位移对比图,正弦位移加载幅值为1.27cm,频率为0.2Hz。输入电流分别为0.25A,0.50A,1.00A,2.00A。从图中可以看出,对于不同的电流,本模型均能精确模拟包括低速区滞回性在内的磁流变阻尼器的阻尼力,表现出良好的输入电流鲁棒性。另外,图6所示为相同电流输入、不同正弦位移加载条件下阻尼力-速度和阻尼力-位移对比图,其中输入的电流为1.00A,正弦位移加载幅值和频率分别为:1.27cm、0.1Hz(Case 1);1.27cm、0.2Hz(Case 2)和2.54cm、0.2Hz(Case 3)。从图中可以看出,对于不同的加载条件,本模型均能精确地模拟磁流变阻尼器的阻尼力,表现出良好的加载条件鲁棒性。同时,为了证明所建立的物理模型的技术优势,对比分析了传统现象学模型(这里分析了Spencer et al.扩展Bouc-Wen模型和Yang et al.扩展Bouc-Wen模型,如图7所示),说明了本发明模型具有突出的加载条件及输入电流鲁棒性。
此外,微粒链模型和准静态模型组合的磁流变阻尼器模型,其与磁流变阻尼器构型参数直接关联(如公式(2)、(5)所示),方便磁流变阻尼器的设计与优化。
- 一种磁流变阻尼器建模方法
- 一种磁流变阻尼器混合建模方法