一种深拖多道地震拖缆姿态确定方法及处理终端
文献发布时间:2023-06-19 10:16:30
技术领域
本发明涉及海洋勘探中拖缆姿态确定技术领域,具体涉及一种深拖多道地震拖缆姿态确定方法及处理终端。
背景技术
深拖多道地震是一种将震源和拖缆布设在距离海底上方100米左右进行海底调查的技术,如图1所示,图1中带有震源的拖体位于距离海底100m(米)左右的上方,拖体与拖缆连接,拖缆上设置有若干检波器,拖缆呈理想的水平直线状态,拖缆经过拖体后通过电缆与位于海表面的地震船连接。在常规的海面拖缆地震勘探中,由于勘探系统与深海海底之间存在一个厚厚的水层,导致地震波的菲涅尔带较大,影响地震数据的分辨率。而深拖多道地震正好能够减小菲涅尔带,进而提高分辨率。对于海面拖缆地震,震源的位置由GPS精确确定,拖缆的形态和位置由水鸟、罗盘、尾标等控制。
深拖地震勘探存在两个难题:(1)连接深拖系统和拖船(即图1中的地震船)的电缆长达1km以上,且需要根据距离海底的高度进行调整,由此深拖系统的深度和相对拖船的距离及方向在整个测线上并不是固定的。(2)由于受拖曳速度、洋流、海水浮力变化等因素的影响,深拖多道地震的拖缆的几何形态在拖曳过程中无法保持为理想的水平直线,而是处于一种不断变化的非线性状态。图2为实际深拖拖缆采集时的形态,其拖缆(即图中的接收缆)在三维空间中呈弯曲状态,拖缆上的各个检波器并不在一条理想的水平直线上。
现有的技术中,通过声学超长基线技术能够较好地确定深拖震源的位置,但深拖拖缆的几何形态却难以确定,而深拖拖缆的集合形态不能准确确定也即意味着后续利用拖缆采集的数据也导致出现偏差,因此需要确定拖缆的三维空间上的姿态,也即需要确定出拖缆上各个检波器的三维坐标。
发明内容
针对现有技术的不足,本发明的目的之一提供一种深拖多道地震拖缆姿态确定方法,其能够解决拖缆姿态确定的问题;
本发明的目的之二提供一种处理终端,其能够解决拖缆姿态确定的问题。
实现本发明的目的之一的技术方案为:一种深拖多道地震拖缆姿态确定方法,包括如下步骤:
步骤1:对每一个炮道集,拾取出每一个检波器上的直达波旅行时t
步骤2:获得地震波在海水中的传播平均速度v;
步骤3:根据直达波旅行时t
步骤4:按方程组①求解出每个检波器的三维坐标(x′,y′,h′),得到每一个检波器的三维坐标,从而相当于得到拖缆的姿态,
式中,(x
进一步地,所述计算出每一个检波器相对于震源的水平距离d和高度差h,其具体实现过程按公式②和公式③计算得到:
式中,(x
实现本发明的目的之二的技术方案为:一种处理终端,其包括:
存储器,用于存储程序指令;
处理器,用于运行所述程序指令,以执行所述的深拖多道地震拖缆姿态确定方法的步骤。
本发明的有益效果为:本发明不需要二维假设,可以获得拖缆三维的空间形态。同时利用直达波、海底反射波、海面反射波的旅行时来确定检波器与震源之间的相对位置,提高相对位置的准确性。将海底反射波的反射点深度当做未知数来求解,通过对比求解的结果以及多波束深度数据,可以评估和质控计算结果的准确性。
附图说明
图1为深拖多道地震观测示意图;
图2为实际深拖多道拖缆采集时的形态;
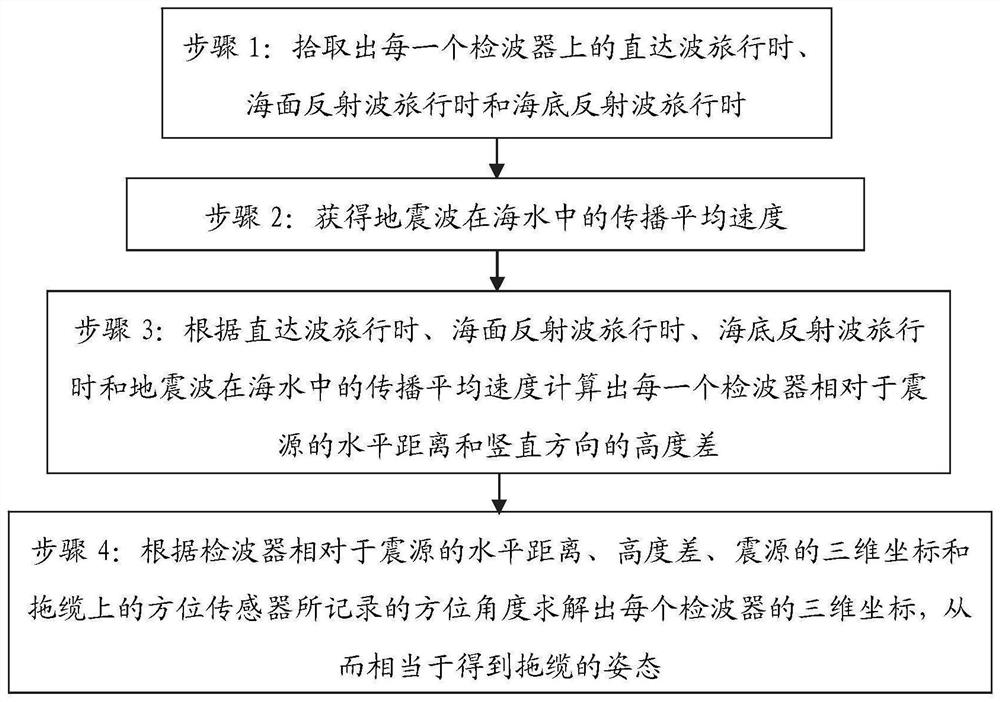
图3为较佳实施例的流程示意图;
图4为求解检波器与震源相对位置的示意图;
图5为求解检波器的三维坐标时的示意图;
图6为处理终端的示意图。
具体实施方式
下面,结合附图以及具体实施方案,对本发明做进一步描述。
如图2-图5所示,一种深拖多道地震拖缆姿态确定方法,包括如下步骤:
步骤1:对每一个炮道集,拾取出每一个检波器上的直达波旅行时t
步骤2:获得地震波在海水中的传播平均速度v。可以通过分析实际勘探采集时所在区域的海面多道地震数据来获得地震波在海水中传播的平均速度,其为现有技术,在此不进行赘述。
步骤3:计算出每一个检波器相对于震源的水平距离d和高度差h。水平距离也即是检波器和震源两个点之间在水平方向上的距离,而高度差也即是以垂直于海面的竖直方向上检波器和震源两个点之间的深度差。
参考图4,图中的i表示第i个检波器,求解检波器相对于震源的水平距离d和高度差h具体包括,
过震源点和检波点的连线作垂直于海面的平面(如图2所示),沿着该平面与海面的交线建立x轴,在该平面内沿着垂直于x轴的方向建立y轴,从而得到该平面内的二维直角坐标系。设震源的坐标为(0,H),H也即是震源到海面的垂直距离,为已知量,检波器的坐标为(x
根据直达波旅行时的计算公式,可得到:
x
根据海面反射波旅行时的计算公式,可得到:
x
根据海底反射波旅行时的计算公式,可得到:
x
根据海面反射波入射角等于反射角,可得到:
根据海底反射波入射角等于反射角,可得到:
将以上公式联合起来,即得到方程组①:
方程组①中,x
d=x
h=H-h
步骤4:参考图5,图中的i表示第i个检波器,根据检波器相对于震源的水平距离d、高度差h、震源的三维坐标(x
按照上述步骤即可得到每一个检波器的三维坐标,从而得到了整个拖缆的三维空间形态,得到拖缆的三维空间形态之后,就可以对深拖多道地震数据进行后续处理了。
本发明不需要二维假设,可以获得拖缆三维的空间形态。同时利用直达波、海底反射波、海面反射波的旅行时来确定检波器与震源之间的相对位置,提高相对位置的准确性。将海底反射波的反射点深度当做未知数来求解,通过对比求解的结果以及多波束深度数据,可以评估和质控计算结果的准确性。
如图6所示,本发明还提供一种处理终端100,其包括:
存储器101,用于存储程序指令;
处理器102,用于运行所述程序指令,以执行所述深拖多道地震拖缆姿态确定方法的步骤。
本说明书所公开的实施例只是对本发明单方面特征的一个例证,本发明的保护范围不限于此实施例,其他任何功能等效的实施例均落入本发明的保护范围内。对于本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及变形,而所有的这些改变以及变形都应该属于本发明权利要求的保护范围之内。
- 一种深拖多道地震拖缆姿态确定方法及处理终端
- 一种深拖多道地震拖缆姿态确定方法及处理终端