一种套装组合餐具插装式自动装箱机及其装箱方法
文献发布时间:2023-06-19 10:18:07
技术领域
本发明属于餐具装箱机技术领域,涉及一种套装组合餐具自动装箱机,特别涉及一种套装组合餐具的插装式自动装箱机及其装箱方法。
背景技术
如图1所示,套装组合餐具通常包括碗Ⅰ、杯子Ⅱ和碟子Ⅲ,碗Ⅰ和杯子Ⅱ置于碟子Ⅲ上,包装后装入餐箱中。在餐具系统化生产的过程中,套装组合餐具在清洗、消毒及包装之后,需要对其进行装箱,以进行存放或运输。装组合餐具的清洗与消毒等环节已经实现了机械化,但套装组合餐具的装箱环节仍然还没有实现机械化,仍然是采用人工将餐具装到空餐箱中,重复繁重的装箱工作,不仅工作劳动强度大,效率低,而且容易造成餐具的二次污染。
随着科技的发展,市面上出现了用机械手实现餐具的机械装箱,但是这类机械装箱是将套装组合餐具平放在餐箱内,该方式会导致餐箱的空间利用率低,并且套装组合餐具平放在餐箱中容易发生晃动而受损,运输稳定性差;另外,现有的餐箱均为尺寸统一的标准箱,通常情况下两套餐具并排放置的尺寸会略大于餐箱的宽度,采用现有技术的装箱机装餐具时,会因为餐箱的尺寸较小而无法入箱或入箱不整齐的情况,常常需要人工调整,可靠性较低。
发明内容
本发明的目的是提供一种自动化程度高、降低工人劳动强度的套装组合餐具插装式自动装箱机及其装箱方法,本发明能大大提高套装组合餐具的装箱效率以及提高餐箱的容积利用率,充分发挥人力资源的优势,有效的解决了现有技术存在的问题。
本发明为实现上述目的采用的技术方案是:一种套装组合餐具插装式自动装箱机,包括空箱传送带、出箱传动带、进碗传送带和控制器,所述空箱传送带以及出箱传动带分别平行设置在第一支架上,且空箱传送带位于出箱传动带上侧;还包括推碗入箱装置和餐箱翻转装置,所述推碗入箱装置设置在第一支架的侧面,餐箱翻转装置设置在推碗入箱装置与第一支架之间;
所述第一支架上还设有用于将空箱传送带上的空餐箱推入餐箱翻转装置的推箱机构,所述推箱机构位于空箱传送带上侧,所述推箱机构包括推箱气缸、推动板和空箱推杆,所述推箱气缸与第一支架连接并位于空箱传送带上侧,且推箱气缸与空箱传送带的传送方向垂直,所述推箱气缸两侧分别设置有与推箱气缸平行的导轴,导轴与第一支架连接,所述推动板通过直线轴承与导轴滑动连接,推箱气缸的伸缩杆与推动板连接,通过推箱气缸可带动推动板沿导轴滑动,所述空箱推杆通过连接杆与推动板连接,且空箱推杆与空箱传送带传送方向平行,所述空箱传送带的前端还设有用于感应空箱传送带上是否有餐箱的第一传感器;
所述推碗入箱装置包括第二支架、餐具队列传送带、推碗气缸、推碗单元和进箱导板单元,所述餐具队列传送带定位在第二支架上,餐具队列传送带表面设有用于将餐具队列传送带分成等距方格的等节距挡板,待装箱的套装组合餐具定位在餐具队列传送带相邻的两个等节距挡板之间;所述推碗气缸与第二支架远离餐箱翻转装置的一侧连接并与餐具队列传送带的传送方向垂直;所述推碗单元的数量与待装碗的餐箱数量一致,推碗单元通过滑动轴与第二支架连接并位于餐具队列传送带上侧,且推碗单元与推碗气缸的伸缩杆连接,通过推碗气缸可使推碗单元将餐具队列传送带上的套装组合餐具推入对应的餐箱中;所述进箱导板单元与待装碗的餐箱数量一致,进箱导板单元与靠餐箱翻转装置一侧的第二支架连接,且进箱导板单元的上端面与餐具队列传送带的上表面齐平;所述进碗传送带通过第三支架定位在餐具队列传送带端部并与餐具队列传送带相互垂直,所述餐具队列传送带的侧面与进碗传送带对应的位置设有用于感应餐具队列传送带上是否有套装组合餐具的第二传感器;
所述餐箱翻转装置包括第四支架、翻转架、翻转气缸、餐箱定位框、用于将餐箱定位框连接在翻转架上的定位框移动机构以及用于驱动定位框移动机构的定位框移动电机,所述翻转架下侧分别通过铰接构件与第四支架铰接连接,翻转气缸下端与第四支架铰接,翻转气缸前端的伸缩杆与翻转架的下侧铰接,翻转气缸的伸缩杆伸缩可使翻转架绕铰接构件转动;所述定位框移动机构分别连接在翻转架两侧,餐箱定位框两侧分别与对应的定位框移动机构连接,所述定位框移动电机固定设置在翻转架下侧并通过传动轴与定位框移动机构连接,从而带动餐箱定位框在翻转架上滑动,待装餐具的空餐箱定位在餐箱定位框中;
所述空箱传送带、出箱传动带、进碗传送带、餐具队列传送带的驱动电机以及第一传感器、第二传感器、推箱气缸、推碗气缸、翻转气缸、定位框移动电机分别与控制器电性连接。
本发明的进一步技术方案是:每个推碗单元均包括推杆、第一推板和第二推板,所述推杆通过直线轴承与滑动轴滑动连接,且推杆与餐具队列传送带的传送方向平行,所述滑动轴位于餐具队列传送带上侧并分别与第二支架连接,且滑动轴分别与推碗气缸平行,所述推碗气缸的伸缩杆与推杆铰接连接;所述第一推板和第二推板分别连接在推杆下侧并延伸至餐具队列传送带上表面,且第一推板和第二推板分别位于对应的套装组合餐具侧面,所述第一推板位于第二推板后侧;通过推碗气缸可带动推杆沿滑动轴滑动,使得第一推板和第二推板分别将对应的套装组合餐具推入对应的餐箱中;每个进箱导板单元均包括分别与第二支架连接的第一导板和第二导板,所述第一导板水平设置,第二导板远离第二支架的一侧向下倾斜设置;所述第一导板和第二导板上端面靠侧边的位置还分别连接有边板,所述边板远离第二支架的一端向内侧靠拢。
本发明的进一步技术方案是:所述定位框移动机构包括直线导轨、驱动链、驱动链轮和从动链轮,所述直线导轨固定连接在翻转架侧面,餐箱定位框底部分别通过滑块与对应的直线导轨滑动连接,所述驱动链轮和从动链轮分别通过链轮架与翻转架的底部连接并位于直线导轨两端,驱动链缠绕在驱动链轮和从动链轮外侧并分别与驱动链轮和从动链轮啮合,所述驱动链与对应的滑块连接;所述定位框移动电机为双头电机,定位框移动电机两端的输出轴分别通过传动轴与对应的驱动链轮连接,定位框移动电机工作可通过驱动链轮和驱动链带动餐箱定位框沿直线导轨滑动。
本发明的进一步技术方案是:所述餐箱定位框侧面还设有用于将餐箱夹紧定位在餐箱定位框中的餐箱夹紧机构,所述餐箱夹紧机构包括餐箱夹紧气缸、夹紧杠杆和夹紧板,所述餐箱夹紧气缸与餐箱定位框的外侧连接,餐箱夹紧气缸的伸缩杆与夹紧杠杆的端部铰接,夹紧杠杆中部与餐箱定位框的侧面铰接,夹紧板位于餐箱定位框内侧,且夹紧板与夹紧杠杆远离餐箱夹紧气缸的一端铰接,所述餐箱夹紧气缸与控制器电性连接。
本发明的进一步技术方案是:所述进碗传送带传送方向的两侧分别设有左栏板和右栏板,右栏板的内侧设有橡胶拨片,左栏板与橡胶拨片对应的位置向外侧凸出设置;所述进碗传送带的上端面高于餐具队列传送带的上端面2~3cm。
本发明的进一步技术方案是:所述铰接构件包括铰接座和铰接轴承,所述铰接座与第四支架的上侧固定连接,铰接轴承与翻转架的底部固定连接,铰接轴承通过转轴与铰接座连接,从而将翻转架铰接在第四支架上。
本发明的进一步技术方案是:所述出箱传动带远离餐箱翻转装置一侧的第一支架上设有用于阻挡餐箱掉落的栏杆。
本发明的另一个技术方案是:一种套装组合餐具插装式自动装箱机的装箱方法,包括如下步骤:
S1、空箱传送带将空餐箱传送至餐箱翻转装置侧面,第一传感器感应到空餐箱后,通过控制器控制空箱传送带停止;
S2、翻转气缸的伸缩杆伸出使得翻转架与水平面呈20~30°夹角,且定位框移动电机工作,通过定位框移动机构控制餐箱定位框滑动至翻转架中部,使得餐箱翻转装置处于接箱状态;
S3、推箱机构的推箱气缸的伸缩杆收缩使得空箱推杆将空箱传送带上的空餐箱推入餐箱翻转装置的餐箱定位框中;
S4、餐箱夹紧机构的餐箱夹紧气缸的伸缩杆伸出,使得夹紧板在夹紧杠杆的杠杆作用下将定位在餐箱定位框中的餐箱夹紧;
S5、翻转气缸的伸缩杆伸出使得翻转架与水平面呈50~70°夹角,且定位框移动电机工作,通过定位框移动机构控制餐箱定位框向推碗入箱装置一侧滑动,使得餐箱处于倾斜状态并且餐箱开口的下侧边与进箱导板单元齐平,餐箱翻转装置处于进碗状态;
S6、包装好的套装组合餐具通过进碗传送带传送至餐具队列传送带上,第二传感器感应到餐具队列传送带上有套装组合餐具后,通过控制器控制餐具队列传送带将套装组合餐具向前传送一步,并计数;
S7、重复步骤S6,直至餐具队列传送带上的套装组合餐具数量达到设定值N后,推碗气缸驱动推碗单元将餐具队列传送带上的套装组合餐具以斜插的方式一前一后交错推入餐箱中,然后定位框移动电机工作,通过定位框移动机构控制餐箱定位框向下滑动一步,使得装入餐箱中最上层的套装组合餐具的端面与进箱导板单元齐平;
S8、反复执行步骤S6和步骤S7,直至餐箱装满;
S9、翻转气缸的伸缩杆收缩使得翻转架向下倾斜并与水平面呈-5~-10°夹角,且定位框移动电机工作,通过定位框移动机构控制餐箱定位框向出箱传动带一侧滑动,使得餐箱翻转装置处于出箱状态;
S10、餐箱夹紧机构的餐箱夹紧气缸的伸缩杆收缩,使得夹紧板松开定位在餐箱定位框中的餐箱,装满套装组合餐具的餐箱在重力作用下滑动至出箱传动带上,完成餐具装箱操作。
本发明的进一步技术方案是:在步骤S6中,若进碗传送带上的套装组合餐具的杯子在侧面,则在经过橡胶拨片时,橡胶拨片将杯子拨至后侧,使得套装组合餐具在装箱时杯子统一朝向外侧。
本发明的进一步技术方案是:在步骤S7中,所述设定值N为待装碗的餐箱数量的两倍。
本发明由于采用上述技术方案,具有如下有益效果:
1.本发明采用斜插的方式将套装组合餐具装入餐箱中,通过翻转气缸使得餐箱处于倾斜状态并且餐箱开口的下侧边与进箱导板单元齐平,再通过推碗气缸驱动推碗单元将餐具队列传送带上的套装组合餐具分别推入对应的餐箱中,套装组合餐具竖直插装在餐箱中,充分提高餐箱的容积利用率,并且采用斜插的方式装箱,餐具进箱更为顺畅,效率更高;
2.本发明的第一推板位于第二推板后侧,两个推板呈一前一后设置,推碗时,在前侧的第二推板先将对应的餐具推入餐箱中,然后位于后侧的第一推板紧接着将对应的餐具推入餐箱中,同一个餐箱中并排放置的两套餐具以前以后进箱,不会互相干涉,装箱可靠;另外,本发明的第一导板水平设置,第二导板向下倾斜设置,即两块导板一高一低交错设置,使得并排放置的两套餐具层叠放置在餐箱中,避免因餐箱的尺寸较小而导致餐具无法入箱或入箱不整齐的情况,大大的提高了装箱的可靠性,减少人工操作;
3.本发明的空箱推杆不仅能将空餐箱推入餐箱翻转装置中,还可以使得空箱传送带上的孔餐箱沿着空箱推杆传送,起到导向作用,使得空箱整齐的落入餐箱翻转装置中;
4.本发明的进碗传送带的栏板内侧设有橡胶拨片,当进碗传送带5上的套装组合餐具的杯子在侧面时,则在经过橡胶拨片时,橡胶拨片将杯子拨至后侧,使得套装组合餐具在装箱时杯子统一朝向外侧,使得组合餐具在进箱过程中更加顺畅,并排放置的两套餐具之间不会产生干涉。
下面结合附图和实施例对本发明一种套装组合餐具插装式自动装箱机及其装箱方法作进一步的说明。
附图说明
图1是本发明套装组合餐具装箱后的结构示意图;
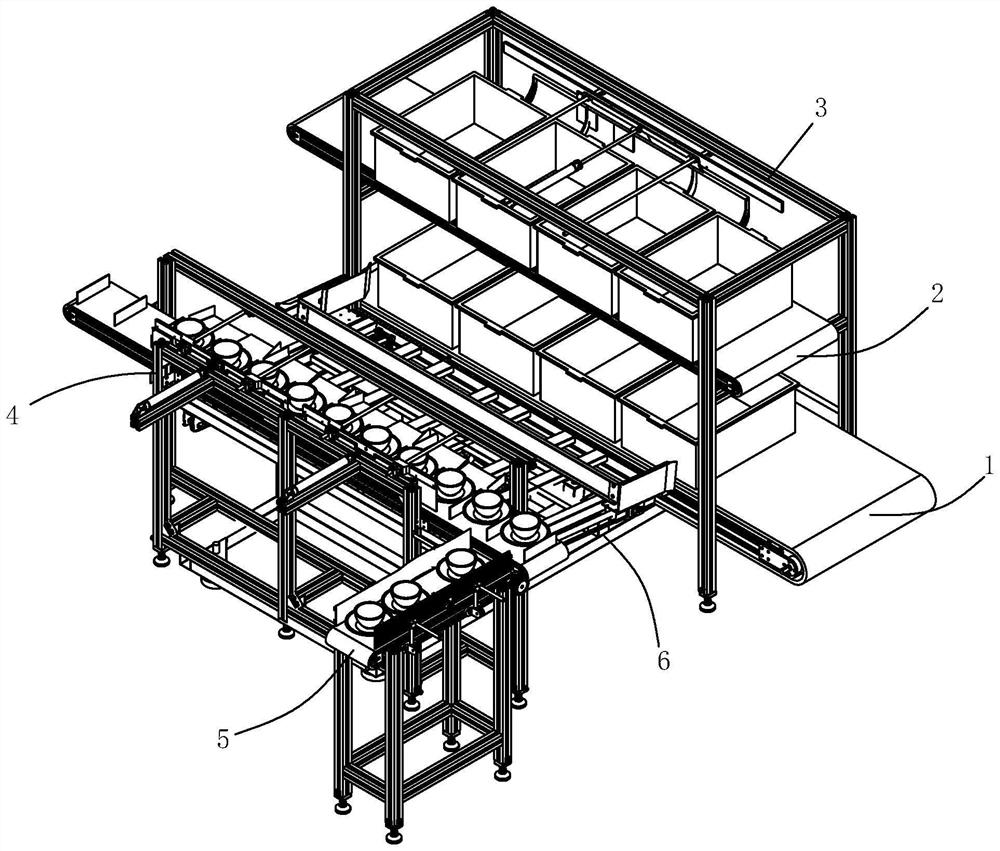
图2是本发明一种套装组合餐具插装式自动装箱机的结构示意图;
图3是空箱传送带和出箱传动带定位在第一支架上的结构示意图;
图4是进碗传送带定位在第三支架上的结构示意图;
图5是进碗传送带的俯视图;
图6是推碗入箱装置的结构示意图;
图7是图6中A处的放大图;
图8是餐箱翻转装置的结构示意图;
图9是餐箱翻转装置另一方向的结构示意图;
图10是餐箱翻转装置进箱状态的结构示意图;
图11是餐箱翻转装置和推碗入箱装置处于进碗状态的结构示意图;
图12是餐箱翻转装置出箱状态的结构示意图;
附图标号说明:1-出箱传动带,101-栏杆,2-空箱传送带,201-推箱气缸,202-推动板,203-导轴,204-连接杆,205-空箱推杆,3-第一支架,4-推碗入箱装置,401-第二支架,402-餐具队列传送带,4021-等节距挡板,403-推碗单元,4031-推杆,4032-第一推板,4033-第二推板,404-推碗气缸,405-滑动轴,406-进箱导板单元,4061-第一导板,4062-第二导板,4063-边板,5-进碗传送带,501-第三支架,502-左栏板,503-橡胶拨片,504-右栏板,6-餐箱翻转装置,601-第四支架,602-翻转气缸,603-定位框移动电机,6031-传动轴,604-餐箱定位框,605-翻转架,6061-驱动链轮,6062-驱动链,6063-滑块,6064-从动链轮,6065-链轮架,6066-直线导轨,6071-餐箱夹紧气缸,6072-夹紧杠杆,6073-夹紧板,6081-铰接座,6082-铰接轴承,Ⅰ-碗,Ⅱ-杯子,Ⅲ-碟子。
具体实施方式
如图1至图12所示,本发明一种套装组合餐具插装式自动装箱机,包括空箱传送带2、出箱传动带1、进碗传送带5和控制器,所述空箱传送带2以及出箱传动带1分别平行设置在第一支架3上,且空箱传送带2位于出箱传动带1上侧;还包括推碗入箱装置4和餐箱翻转装置6,所述推碗入箱装置4设置在第一支架3的侧面,餐箱翻转装置6设置在推碗入箱装置4与第一支架3之间。
如图3所示,第一支架3上还设有用于将空箱传送带2上的空餐箱推入餐箱翻转装置6的推箱机构,所述推箱机构位于空箱传送带2上侧,所述推箱机构包括推箱气缸201、推动板202和空箱推杆205,所述推箱气缸201与第一支架3连接并位于空箱传送带2上侧,且推箱气缸201与空箱传送带2的传送方向垂直,所述推箱气缸201两侧分别设置有与推箱气缸201平行的导轴203,导轴203与第一支架3连接,所述推动板202通过直线轴承与导轴203滑动连接,推箱气缸201的伸缩杆与推动板202连接,通过推箱气缸201可带动推动板202沿导轴203滑动,所述空箱推杆205通过连接杆204与推动板202连接,且空箱推杆205与空箱传送带2传送方向平行,所述空箱传送带2的前端还设有用于感应空箱传送带2上是否有餐箱的第一传感器;所述出箱传动带1远离餐箱翻转装置6一侧的第一支架3上设有用于阻挡餐箱掉落的栏杆101。在本实施例中,所述空箱推杆205不仅能将空餐箱推入餐箱翻转装置6中,还可以使得空箱传送带2上的孔餐箱沿着空箱推杆205传送,起到导向作用。
如图6所示,本发明的推碗入箱装置4包括第二支架401、餐具队列传送带402、推碗气缸404、推碗单元403和进箱导板单元406,所述餐具队列传送带402定位在第二支架401上,餐具队列传送带402表面设有用于将餐具队列传送带402分成等距方格的等节距挡板4021,待装箱的套装组合餐具定位在餐具队列传送带402相邻的两个等节距挡板4021之间;所述推碗气缸404与第二支架401远离餐箱翻转装置6的一侧连接并与餐具队列传送带402的传送方向垂直;所述推碗单元403的数量与待装碗的餐箱数量一致,推碗单元403通过滑动轴405与第二支架401连接并位于餐具队列传送带402上侧,且推碗单元403与推碗气缸404的伸缩杆连接,通过推碗气缸404可使推碗单元403将餐具队列传送带402上的套装组合餐具推入对应的餐箱中;所述进箱导板单元406与待装碗的餐箱数量一致,进箱导板单元406与靠餐箱翻转装置6一侧的第二支架401连接,且进箱导板单元406的上端面与餐具队列传送带402的上表面齐平;所述进碗传送带5通过第三支架501定位在餐具队列传送带402端部并与餐具队列传送带402相互垂直,所述餐具队列传送带402的侧面与进碗传送带5对应的位置设有用于感应餐具队列传送带402上是否有套装组合餐具的第二传感器。
如图7所示,每个推碗单元403均包括推杆4031、第一推板4032和第二推板4033,所述推杆4031通过直线轴承与滑动轴405滑动连接,且推杆4031与餐具队列传送带402的传送方向平行,所述滑动轴405位于餐具队列传送带402上侧并分别与第二支架401连接,且滑动轴405分别与推碗气缸404平行,所述推碗气缸404的伸缩杆与推杆4031铰接连接;所述第一推板4032和第二推板4033分别连接在推杆4031下侧并延伸至餐具队列传送带402上表面,且第一推板4032和第二推板4033分别位于对应的套装组合餐具侧面,所述第一推板4032位于第二推板4033后侧;通过推碗气缸404可带动推杆4031沿滑动轴405滑动,使得第一推板4032和第二推板4033分别将对应的套装组合餐具推入对应的餐箱中;每个进箱导板单元406均包括分别与第二支架401连接的第一导板4061和第二导板4062,所述第一导板4061水平设置,第二导板4062远离第二支架401的一侧向下倾斜设置;所述第一导板4061和第二导板4062上端面靠侧边的位置还分别连接有边板4063,所述边板4063远离第二支架401的一端向内侧靠拢。由于本发明的第一推板4032位于第二推板4033后侧,两个推板呈一前一后设置,推碗时,在前侧的第二推板4033先将对应的餐具推入餐箱中,然后位于后侧的第一推板4032紧接着将对应的餐具推入餐箱中,同一个餐箱中并排放置的两套餐具以前以后进箱,不会互相干涉,装箱可靠;另外,本发明的第一导板4061水平设置,第二导板4062向下倾斜设置,即两块导板一高一低交错设置,使得并排放置的两套餐具层叠放置在餐箱中,避免因餐箱的尺寸较小而导致餐具无法入箱或入箱不整齐的情况,大大的提高了装箱的可靠性,减少人工操作。
如图8、图9所示,所述餐箱翻转装置6包括第四支架601、翻转架605、翻转气缸602、餐箱定位框604、用于将餐箱定位框604连接在翻转架605上的定位框移动机构以及用于驱动定位框移动机构的定位框移动电机603,所述翻转架605下侧分别通过铰接构件与第四支架601铰接连接,所述铰接构件包括铰接座6081和铰接轴承6082,所述铰接座6081与第四支架601的上侧固定连接,铰接轴承6082与翻转架605的底部固定连接,铰接轴承6082通过转轴与铰接座6081连接,从而将翻转架605铰接在第四支架601上;所述翻转气缸602下端与第四支架601铰接,翻转气缸602前端的伸缩杆与翻转架605的下侧铰接,翻转气缸602的伸缩杆伸缩可使翻转架605绕铰接构件转动;所述定位框移动机构分别连接在翻转架605两侧,餐箱定位框604两侧分别与对应的定位框移动机构连接,所述定位框移动电机603固定设置在翻转架605下侧并通过传动轴6031与定位框移动机构连接,从而带动餐箱定位框604在翻转架605上滑动,待装餐具的空餐箱定位在餐箱定位框604中;所述定位框移动机构包括直线导轨6066、驱动链6062、驱动链轮6061和从动链轮6064,所述直线导轨6066固定连接在翻转架605侧面,餐箱定位框604底部分别通过滑块6063与对应的直线导轨6066滑动连接,所述驱动链轮6061和从动链轮6064分别通过链轮架6065与翻转架605的底部连接并位于直线导轨6066两端,驱动链6062缠绕在驱动链轮6061和从动链轮6064外侧并分别与驱动链轮6061和从动链轮6064啮合,所述驱动链6062与对应的滑块6063连接;所述定位框移动电机603为双头电机,定位框移动电机603两端的输出轴分别通过传动轴6031与对应的驱动链轮6061连接,定位框移动电机603工作可通过驱动链轮6061和驱动链6062带动餐箱定位框604沿直线导轨6066滑动。
另外,本发明的餐箱定位框604侧面还设有用于将餐箱夹紧定位在餐箱定位框604中的餐箱夹紧机构,所述餐箱夹紧机构包括餐箱夹紧气缸6071、夹紧杠杆6072和夹紧板6073,所述餐箱夹紧气缸6071与餐箱定位框604的外侧连接,餐箱夹紧气缸6071的伸缩杆与夹紧杠杆6072的端部铰接,夹紧杠杆6072中部与餐箱定位框604的侧面铰接,夹紧板6073位于餐箱定位框604内侧,且夹紧板6073与夹紧杠杆6072远离餐箱夹紧气缸6071的一端铰接,所述餐箱夹紧气缸6071与控制器电性连接。通过餐箱夹紧机构将餐箱夹紧定位在餐箱定位框604中,避免在装餐具过程中餐箱移动而影响装箱效率。
在本发明中,所述空箱传送带2、出箱传动带1、进碗传送带5、餐具队列传送带402的驱动电机以及第一传感器、第二传感器、推箱气缸201、推碗气缸404、翻转气缸602、定位框移动电机603分别与控制器电性连接,本发明的控制器可以是PLC控制器或由单片机制成的控制器。
另外,如图4、图5所示,本发明的进碗传送带5传送方向的两侧分别设有左栏板502和右栏板504,右栏板504的内侧设有橡胶拨片503,左栏板502与橡胶拨片503对应的位置向外侧凸出设置;并且所述进碗传送带5的上端面高于餐具队列传送带402的上端面2~3cm。若进碗传送带5上的套装组合餐具的杯子Ⅱ在侧面,则在经过橡胶拨片503时,橡胶拨片503将杯子Ⅱ拨至后侧,使得套装组合餐具在装箱时杯子Ⅱ统一朝向外侧,使得组合餐具在进箱过程中更加顺畅,并排放置的两套餐具之间不会产生干涉。
另外,本发明还提供一种套装组合餐具插装式自动装箱机的装箱方法,包括如下步骤:
S1、空箱传送带2将空餐箱传送至餐箱翻转装置6侧面,第一传感器感应到空餐箱后,通过控制器控制空箱传送带2停止;
S2、翻转气缸602的伸缩杆伸出使得翻转架605与水平面呈20~30°夹角,且定位框移动电机603工作,通过定位框移动机构控制餐箱定位框604滑动至翻转架605中部,使得餐箱翻转装置6处于接箱状态;
S3、推箱机构的推箱气缸201的伸缩杆收缩使得空箱推杆205将空箱传送带2上的空餐箱推入餐箱翻转装置6的餐箱定位框604中;
S4、餐箱夹紧机构的餐箱夹紧气缸6071的伸缩杆伸出,使得夹紧板6073在夹紧杠杆6072的杠杆作用下将定位在餐箱定位框604中的餐箱夹紧;
S5、翻转气缸602的伸缩杆伸出使得翻转架605与水平面呈50~70°夹角,且定位框移动电机603工作,通过定位框移动机构控制餐箱定位框604向推碗入箱装置4一侧滑动,使得餐箱处于倾斜状态并且餐箱开口的下侧边与进箱导板单元406齐平,餐箱翻转装置6处于进碗状态;
S6、包装好的套装组合餐具通过进碗传送带5传送至餐具队列传送带402上,第二传感器感应到餐具队列传送带402上有套装组合餐具后,通过控制器控制餐具队列传送带402将套装组合餐具向前传送一步,并计数;
S7、重复步骤S6,直至餐具队列传送带402上的套装组合餐具数量达到设定值N后,推碗气缸404驱动推碗单元403将餐具队列传送带402上的套装组合餐具以斜插的方式一前一后交错推入餐箱中,然后定位框移动电机603工作,通过定位框移动机构控制餐箱定位框604向下滑动一步,使得装入餐箱中最上层的套装组合餐具的端面与进箱导板单元406齐平;
S8、反复执行步骤S6和步骤S7,直至餐箱装满;
S9、翻转气缸602的伸缩杆收缩使得翻转架605向下倾斜并与水平面呈-5~-10夹角,且定位框移动电机603工作,通过定位框移动机构控制餐箱定位框604向出箱传动带1一侧滑动,使得餐箱翻转装置6处于出箱状态;
S10、餐箱夹紧机构的餐箱夹紧气缸6071的伸缩杆收缩,使得夹紧板6073松开定位在餐箱定位框604中的餐箱,装满套装组合餐具的餐箱在重力作用下滑动至出箱传动带1上,完成餐具装箱操作。
在步骤S6中,若进碗传送带5上的套装组合餐具的杯子Ⅱ在侧面,则在经过橡胶拨片503时,橡胶拨片503将杯子Ⅱ拨至后侧,使得套装组合餐具在装箱时杯子Ⅱ统一朝向外侧,使得组合餐具在进箱过程中更加顺畅,并排放置的两套餐具之间不会产生干涉。
在步骤S7中,所述设定值N为待装碗的餐箱数量的两倍,在本实施例中,同时装箱的餐箱数量为4个,即推碗单元403和进箱导板单元406均为4组,且每组推碗单元403和进箱导板单元406分别对应一个餐箱,当餐具队列传送带402上的套装组合餐具数量达到8套时,则推碗气缸404驱动推碗单元403将餐具队列传送带402上的套装组合餐具分别推入对应的餐箱中。
本发明提供的一种套装组合餐具插装式自动装箱机的装箱方法采用斜插的方式将套装组合餐具装入餐箱中,通过翻转气缸使得餐箱处于倾斜状态并且餐箱开口的下侧边与进箱导板单元齐平,再通过推碗气缸驱动推碗单元将餐具队列传送带上的套装组合餐具分别推入对应的餐箱中,套装组合餐具竖直插装在餐箱中,充分提高餐箱的容积利用率,并且采用斜插的方式装箱,餐具进箱更为顺畅,效率更高。
以上实施例仅为本发明的较佳实施例,本发明的结构并不限于上述实施例列举的形式,凡在本发明的精神和原则之内所作的任何修改、等同替换等,均应包含在本发明的保护范围之内。
- 一种套装组合餐具插装式自动装箱机及其装箱方法
- 一种套装组合餐具插装式自动装箱机的推碗入箱装置