基于SLAM与红外的机器人室内导航定位系统及方法
文献发布时间:2023-06-19 10:27:30
技术领域
本发明涉及定位和导航技术领域,尤其涉及基于SLAM与红外的机器人室内导航定位系统及方法。
背景技术
当前VSLAM(Visual Simultaneous Localization and Mapping视觉即时定位与地图构建)已经广泛应用在机器人导航中,其可以帮助机器人完成定位和导航任务,但是由于VSLAM是基于图像处理的,容易受到光线和视角的影响,并且不能对初始化地图点位置依赖较大,如机器人设定的初始化位置点位A,后续就只能在A点开机来完成地图初始化,而如果在B点开机则需要手动对位置进行校准并且初始化才可以保证机器人正常运行。并且在运行过程中还会因光线以及环境改变导致机器人无法进行精确定位的情况存在,因此,我们提出基于SLAM与红外的机器人室内导航定位系统及方法来解决以上问题。
发明内容
本发明提出的一种机器人用高效粉碎装置,解决了背景技术中的问题。
为了实现上述目的,本发明采用了如下技术方案:
基于SLAM与红外的机器人室内导航定位系统,包括发射装置、移动机器人、固定在移动机器人身上的广角红外接收器;
优选的,所述广角红外接收器用于接收红外图像,红外接收器的内参和畸变参数都被提前预设好。
优选的,发射装置的发射频率为1/ms。
基于SLAM与红外的机器人室内导航定位系统的定位方法,包括基于SLAM与红外的机器人室内导航定位系统,所述基于SLAM与红外的机器人室内导航定位系统的定位方法包括以下步骤:
S1,集成点阵式主动红外黏贴于室内天花板四角或四周墙壁,启动光广角外接收器,广角红外接收器的信号接收角度和方向预先设定,并且每个基准设备预先设置好不同发射波段;
S2,首次启动时会根据各个位置基点与机器之间的距离和角度计算出,每一个位置基准器之间的距离,并且得到一个正方形或长方形形态的矩阵图,并将数据保存于机器人端上面的储存单元中;
S3,构建二维实景几何地图构建,根据放置于天花板的四个基准设备以及设备与设备之间的关系按照一定比例预先生成一个m*m的二位矩阵图,用于作为使用vslam使用的闭合图,然后基于vslm算法在这个M*M的矩阵范围内构建使用环境的实景二维图,并且使用左下角的基准点作为基准原点;
S4,机器人在开机时或者遇到障碍物重新规划行动路径,首先根据黏贴在天花板上的四个基准位置点与当前机器人之间的距离来确认机器人当前处在哪个当前环境中的位置,并且通过基准原点与机器人之间的角度与距离确认机器人当前姿态状况。
优选的,定位分为相对定位与绝对定位两种方式,其中相对定位为相对于机器人当前位置,坐标点在那个方向距离目的地有多远,绝对定位为目标坐标点相对于基准原点的距离以及角度。
优选的,机器人在运行过程中会进行绝对位置绝对方位、相对位置相对方位的对比来校准位置避免机器人丢失现象产生。
本发明的有益效果是:
本发明地图构建更快速、定位更准确快速、不对原始初始化点存在依赖、机器人可以随处开机即用。
附图说明
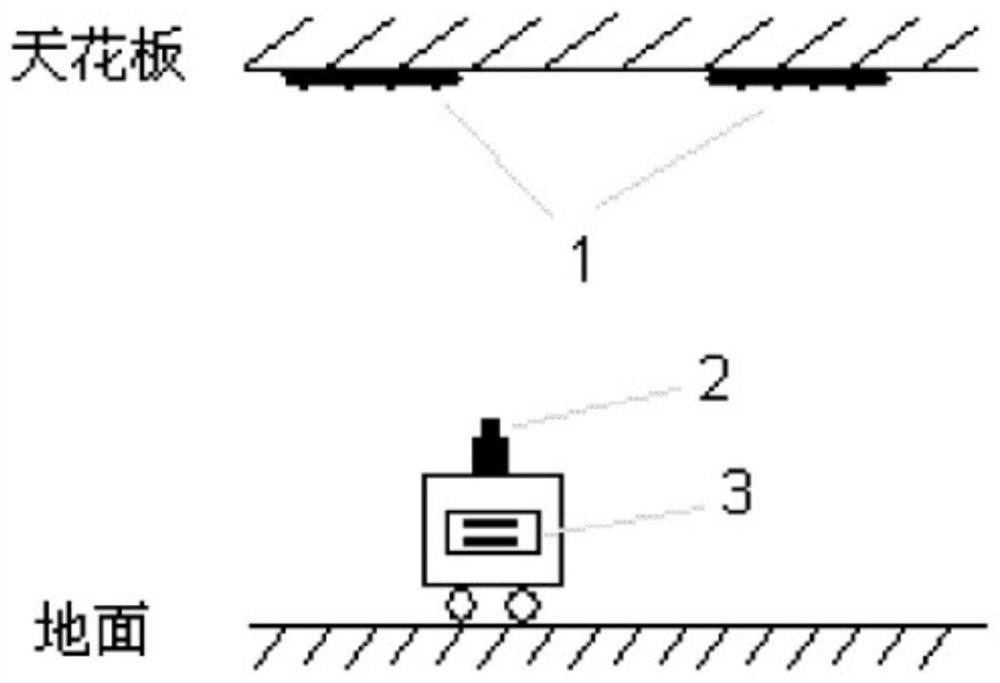
图1为本发明的基于SLAM与红外的机器人室内导航定位系统结构示意图。
图2为本发明的路标结构示意图。
图3为本发明的真实环境和地图之间移动旋转示意图。
图中:1、发射装置;2、广角红外接收器;3、移动机器人。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
实施例一
参照图1-3,基于SLAM与红外的机器人室内导航定位系统,包括发射装置、移动机器人、固定在移动机器人身上的广角红外接收器;
在本实施例中,所述广角红外接收器用于接收红外图像,广角红外接收器的内参和畸变参数都被提前预设好,发射装置的发射频率为1/ms。
基于SLAM与红外的机器人室内导航定位系统的定位方法包括以下步骤:
S1,集成点阵式主动红外黏贴于室内天花板四角或四周墙壁,启动广角红外接收器,广角红外接收器的信号接收角度和方向预先设定,并且每个基准设备预先设置好不同发射波段;
S2,首次启动时会根据个位置几点与机器之间的距离和角度计算出,每一个位置基准器之间的距离,并且得到一个正方形或长方形形态的矩阵图,并将数据保存于机器人段上面的储存单元中;
S3,构建二维实景几何地图构建,根据放置于天花板的四个基准设备以及设备与设备之间的关系按照一定比例预先生成一个m*m的二位矩阵图,用于作为使用vslam使用的闭合图,然后基于vslm算法在这个M*M的矩阵范围内构建使用环境的实景二维图,并且使用左下角的基准点作为基准原点;
S4,机器人在开机时或者遇到障碍物重新规划行动路径,首先根据黏贴在天花板上的四个基准位置点与当前机器人之间的距离来确认机器人当前处在哪个当前环境中的位置,并且通过基准原点与机器人之间的角度与距离确认机器人当前姿态状况。
在本实施例中,定位分为相对定位与绝对定位两种方式,其中相对定位为相对于机器人当前位置,坐标点在那个方向距离目的地有多远,绝对定位为目标坐标点相对于基准原点的距离以及角度。
在本实施例中,机器人在运行过程中会进行绝对位置绝对方位、相对位置相对方位的对比来校准位置避免机器人丢失现象产生。
实施例二
参照图1-3,图1给出了本发明的基于红外路标的移动机器人定位系统的示意图,参照图一本发明包括黏贴于室内天花板四角上的位置基点设备,固定在机器人身上的广角红外接收器、用于地图构建的机定位的slam计算单元以及地图及位置点等数据的存储单元构成。
装载于移动机器人身上的广角红外接收器,接收来自四个位置几点的信号来获得基准点之间的各个几何距离,并且根据这些距离关系生成一个m*n的长方形或正方形形态的矩阵图形,来为slam计算模块提供键图范围,并且选定左下角的基准点作为初始化基准零点,来构建实景几何图填充这个m*n的矩阵像素点,按照一定比例产生一个与实景对应的地图矩阵图。由于基准零点为黏贴于天花板左下角的红外位置基点,所以slam进行定位是不必特意的依据与高精度地图中的初始化点进行定位。避免了用户在使用时必须定点开机或者手动校准初始化位置点的问题。
图2给出的是高精度地图中各个位置点的位置关系,所有的位置点都是依据于基准位置零点(左下角的位置基点)进行定位,用户可以直接手动移动或控制机器人移动到位置点进行坐标标注,或直接将生成的矩阵图形导出使用作图软件在地图坐标位置,并导入到地图中也可以完成坐标标注工作。
图3给出的是真实环境和地图之间移动旋转以及位置定位导航的示意图,地图定位分为,机器人当前所处位置定位以及目标点定位两部分,目标点定位又分为相对位置与绝对位置。
机器人位置点指的是机器人当前位置相对于基准零点所处的位置
目标点相对位置指的是,目标点相对于机器人当前所处位置的关系
目标点绝对位置指的是,目标点相对于基准零点所处的位置。机器人在导航过程中会不时的对相对位置与绝对位置进行比多以此来校准运行轨迹。
本发明的优点在于地图构建更快速、定位更准确快速、不对原始初始化点存在依赖、机器人可以随处开机即用。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 基于SLAM与红外的机器人室内导航定位系统及方法
- 基于红外路标的移动机器人定位系统和方法