一种基于无人驾驶的自动收集干燥装置及其机械臂运动规划方法
文献发布时间:2023-06-19 10:36:57
应用领域
本发明涉及机械装置领域,特别是一种基于无人驾驶的自动收集干燥装置及其机械臂运动规划方法。
背景技术
生活垃圾一般可分为四大类:可回收垃圾、厨余垃圾、有害垃圾和其他垃圾。目前常用的垃圾处理方法主要有综合利用、卫生填埋、焚烧和堆肥。可回收垃圾包括纸类、金属、塑料、玻璃等,通过综合处理回收利用,可以减少污染,节省资源。厨房垃圾包括剩菜剩饭、骨头、菜根菜叶等食品类废物,经生物技术就地处理堆肥,每吨可生产0.3吨有机肥料。有害垃圾包括废电池、废日光灯管、废水银温度计、过期药品等,这些垃圾需要特殊安全处理。生活垃圾的处理方法大致可分为:焚烧、填埋、分选回收再利用。目前处理生活垃圾最好的方法应该是分选回收再利用。因为焚烧垃圾会释放出很多有毒气体。一方面污染大气,另一方面危害人体健康。而填埋也不是好办法。首先,填埋垃圾要侵占大量宝贵土地,而且随着城市人口的增加,这种侵占会越来越严重。其次,将垃圾当作肥料,会使土地渣化严重,并且污染地下水。只有将垃圾进行按类分选后,便可以用各种不同的方法进行回收再利用。分选回收再利用应该是处理生活垃圾的最好方法。
但是,迄今为止,垃圾收集处理还是主要依赖于环卫工人起早贪黑地开着环卫车进行垃圾收集,环卫车的容量有限,很多时候垃圾会溢出或者掉落等,不仅影响市容市貌,也给环卫工人的工作徒增了很多负担。并且,城市的环卫工作需要雇佣很多很多环卫工人,这样一来需要花费大量的人力物力,效率也不一定会有所提高,而且垃圾桶的处理不及时也非常容易滋生细菌等,所以,解决垃圾出来问题迫在眉睫。
发明内容
本发明克服了现有技术的不足,提供了一种基于无人驾驶的自动收集干燥装置,为达到上述目的,本发明采用的技术方案为:一种基于无人驾驶的自动收集干燥装置,包括:车身以及机械臂,车身包括控制室以及收集箱,控制室与收集箱通过底板固定连接,控制室的外壁设置有若干图像采集设备;
控制室的内部包括:控制台以及座位,控制台的一侧设置有显示屏,控制台的内部设置有处理器,控制台包括由信号输入设备;
收集箱的一侧设置有若干箱门,另一侧固定设置有滑道,滑道活动连接有若干机械臂,若干机械臂能够沿滑道滑动,机械臂包括第一关节、第二关节以及抓取部,抓取部设置有检测设备;
机械臂包括第一机械臂与第二机械臂,第一机械臂关节处设置有至少一个第一标志点,第二机械臂上设置有至少一个第二标志点,第一标志点上设置有第一传感器,第二标志点上设置有第二传感器,第一传感器用于监测第一机械臂姿态信息,第二传感器用于监测第二机械臂姿态信息;
收集箱的内部设置有若干干燥设备,收集箱的底部设置有搅动盘;
垃圾桶的底部设置有若干过滤层,任二过滤层的中间设置有伸缩机构;
收集箱的侧壁设置有若干消毒喷头,若干消毒喷头的内部均设置有消毒液,若干消毒喷头均连接有消毒瓶,消毒瓶的内部装有消毒液。
本发明一个较佳实施例中,干燥设备的数量与垃圾垃圾间的数量相等,搅动盘的数量与垃圾间的数量相等。
本发明一个较佳实施例中,滑道与收集箱等长,箱门的数量与垃圾室的数量相等。
本发明一个较佳实施例中,第一关节的一端连接有滑动部,滑动部设置于滑道的内部;第一关节的另一端铰接有第二关节,第二关节连接有抓取部,抓取部为橡胶材料制成。
本发明一个较佳实施例中,信号输入设备包括键盘、鼠标、触摸屏、按钮以及声控采集设备的一种或多种的组合;若干干燥设备包括风管、干燥灯、吸潮纸,电热丝的一种或多种的组合。
本发明一个较佳实施例中,收集箱的内部设置有若干隔板,若干隔板呈等距间隔排列,隔板将收集箱的内部空间分为若干垃圾室,若干垃圾室的内部均设置有传感器。
本发明一个较佳实施例中,还包括有若干车轮,若干车轮均连接有电机的输出端。
本发明还提供了一种基于无人驾驶的机械臂运动规划方法,应用于任一一种基于无人驾驶的自动收集干燥装置,其特征在于,
采集运动空间信息,建立三维空间坐标系;
根据三维空间坐标系获取第一机械臂与第二机械臂初始位置坐标;
获取第一机械臂初始位置信息,并生成正向位移信号,
根据正向位移信号,生成第一机械臂正向位移量;
获取第二机械臂初始位置信息,生成负向位移信号,
根据负向位移信号,生成第二机械臂负向位移量;
将第一机械臂正向位移量与第二机械臂负向位移量进行绝对值求差计算,得到结果信息;
判断结果信息是否小于预设阈值,
若小于,则生成第一机械臂与第二机械臂夹持信息,通过夹持信息对垃圾桶进行夹持移动;
若大于,则生成位移补偿信息,通过位移补偿信息对第一机械臂正向位移量或/和第二机械臂负向位移量进行补偿。
本发明一个较佳实施例中,获取垃圾桶位置信息,并提取垃圾桶边缘线位置信息,
获取第一机械臂初始位置信息与第二机械臂初始位置信息,
将第一机械臂初始位置信息与垃圾桶边缘线位置信息进行比较,得到第一偏差率;
将第二机械臂初始位置信息与垃圾桶边缘线位置信息进行比较,得到第二偏差率;
若第一偏差率小于第二偏差率,则生成优先级排序,第一机械臂运动优先级大于第二机械臂运动优先级;
若第一偏差率大于第二偏差率,则生成优先级排序,第一机械臂运动优先级小于第二机械臂运动优先级。
本发明一个较佳实施例中,获取机械臂参数信息,建立机械臂关节标志点,生成标志点信息;
采集垃圾桶位置信息,根据垃圾桶位置信息,生成标志点弯折姿态信息;
根据标志点弯折姿态信息,建立机械臂运动模型,
根据机械臂运动模型生成运动方式,得到机械臂运动量信息;
根据机械臂运动量信息进行机械臂适配性运动。
本发明解决了背景技术中存在的缺陷,本发明具备以下有益效果:
(1)本发明采用的是无人驾驶自动收集垃圾桶内的垃圾的方式,节省了大量的人力物力,同时还可以对不同的垃圾桶进行识别,根据垃圾桶的颜色识别出其对应的垃圾类型,分类收集后集中处理,高效完成工作,无需人员实时操纵,大量节约了人员劳动力,且采用全自动化的控制,保证整个流程完整高效地运行,同时还可以在垃圾倾倒后进行一定程度的消毒灭菌等;及时针对已经装满垃圾的垃圾桶进行清理,避免了恶臭气味的形成,同时也是能够更好地维护市容市貌,整个过程仅需很少的时间就可以完成,同时不影响用户继续使用垃圾桶。收集箱的内部设置有若干干燥设备,可以对垃圾进行干燥处理,避免产生垃圾臭水等,减少细菌的滋生;收集箱的底部设置有搅动盘,对垃圾进行搅动,可以加速垃圾的干燥;垃圾桶的底部设置有若干过滤层,使垃圾桶内的垃圾进行过滤处理,干燥更快;任二过滤层的中间设置有伸缩机构,过滤层可以上下移动,避免堵塞。
(2)控制室的外壁设置有若干图像采集设备,同时可以实时探测与周边障碍物之间的距离,用于实现避障等功能;控制室内设置有座位,在无人驾驶全自动收集的基础上,还可以有工作人员进行实时的监督,如发生特殊情况,工作人员也可以进行实时的调整;控制台包括由信号输入设备,工作人员可以通过信号输入设备来调整整个装置的工作状态,同时可以根据实际情况,实时调整整个装置的功能使用等。
(3)收集箱的侧壁设置有若干消毒喷头,垃圾暴露在空气中不可避免的会滋生很多细菌,对垃圾进行及时的消毒可以有效避免细菌滋生,同时可以对空气起到一个净化消毒的作用。抓取部为橡胶材料制成,摩擦力大,抓取动作稳固,同时还不会损伤垃圾桶。收集箱的顶部设置有伸缩盖,伸缩盖可以在倾倒垃圾时自动打开,在行驶过程中自动关闭,既能够方便垃圾车进行收集,又可以在行驶过程中避免垃圾掉落,封闭时有效遏制了恶臭气味的扩散。
(4)收集箱的一侧设置有若干箱门,通过打开箱门可以将收集好的垃圾倒出,再进行下一步的集中处理;另一侧固定设置有滑道,若干机械臂能够沿滑道滑动,机械臂在抓住垃圾桶后就可以进行移动,移动到对应的垃圾室之后在进行倾倒,高效完成垃圾分类;抓取部设置有检测设备,可以检测抓取部与垃圾桶之间的距离,便于根据距离来计算运动轨迹,顺利完成抓取倾倒。隔板将收集箱的内部空间分为若干垃圾室,不同的垃圾桶可以倒在不同的垃圾室里,这样一来就可以把垃圾分类收集,从而进行分类处理,简洁又高效;若干垃圾室的内部均设置有传感器,可以实时监测垃圾室内的垃圾重量,在达到垃圾车的限重值的时候发出预警,避免超重,安全运行。
(5)采集运动空间信息,建立三维空间坐标系,根据三维空间坐标系获取两机械臂初始位置坐标,根据运动信息建立两机械臂配合规则,根据配合模型自动生成运动轨迹以及两机械臂之间的相互配合关系,机械臂沿运动轨迹进行移动,精度较高。获取垃圾桶边缘位置信息,分别判断垃圾桶与第一机械臂、第二机械臂的距离,距离较近的机械臂首先进行移动至垃圾桶附近,生成机械臂优先运动排序,保证控制机械臂精准灵活。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他实施例的附图。
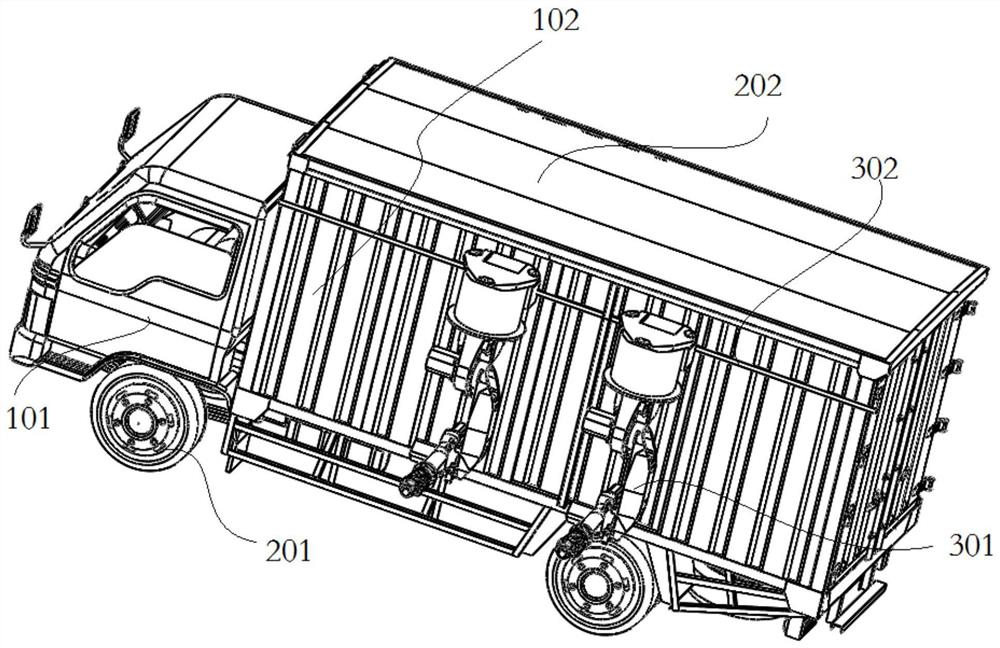
图1为装置示意图;
图2为;垃圾室示意图;
图3为机械臂示意图;
图4为干燥机构示意图;
图5为机械臂运动规划方法流程图;
图6为优先级排序方法流程图;
图7为机械臂运动量方法流程图
附图标记如下说明:101、控制室;102、收集箱;201、车轮;202、伸缩盖;301、抓取手;3011、第一关节;3012、第二关节;3013、标志点;3014、抓取部;302、滑道;401、垃圾室;4011、搅动盘;4012、干燥设备;402、隔板。
具体实施方式
为了能够更加清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述,这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成,需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。
在本申请的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请保护范围的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或隐含指明所指示的技术特征的数量。因此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明创造的描述中,除非另有说明,“多个”的含义是两个或两个以上。
在本申请的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本申请中的具体含义。
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
本发明采用的是无人驾驶自动收集垃圾桶内的垃圾的方式,节省了大量的人力物力,同时还可以对不同的垃圾桶进行识别,根据垃圾桶的颜色识别出其对应的垃圾类型,分类收集后集中处理,高效完成工作,无需人员实时操纵,大量节约了人员劳动力,且采用全自动化的控制,保证整个流程完整高效地运行,同时还可以在垃圾倾倒后进行一定程度的消毒灭菌等;及时针对已经装满垃圾的垃圾桶进行清理,避免了恶臭气味的形成,同时也是能够更好地维护市容市貌,整个过程仅需很少的时间就可以完成,同时不影响用户继续使用垃圾桶。收集箱102的内部设置有若干干燥设备4012,可以对垃圾进行干燥处理,避免产生垃圾臭水等,减少细菌的滋生;收集箱102的底部设置有搅动盘4011,对垃圾进行搅动,可以加速垃圾的干燥;垃圾桶的底部设置有若干过滤层,使垃圾桶内的垃圾进行过滤处理,干燥更快;任二过滤层的中间设置有伸缩机构,过滤层可以上下移动,避免堵塞。
如图1-4所示,一种基于无人驾驶的自动收集干燥装置,包括:车身以及机械臂,车身包括控制室101以及收集箱102,控制室101与收集箱102通过底板固定连接,控制室101的外壁设置有若干图像采集设备;控制室101的内部包括:控制台以及座位,控制台的一侧设置有显示屏,控制台的内部设置有处理器,控制台包括由信号输入设备。
在此需要说明的一点是,控制室101的外壁设置有若干图像采集设备,同时可以实时探测与周边障碍物之间的距离,用于实现避障等功能;控制室101内设置有座位,在无人驾驶全自动收集的基础上,还可以有工作人员进行实时的监督,如发生特殊情况,工作人员也可以进行实时的调整。
收集箱102的一侧设置有若干箱门,另一侧固定设置有滑道302,滑道302活动连接有若干机械臂,若干机械臂能够沿滑道302滑动,机械臂包括第一关节3011、第二关节3012以及抓取部3014,抓取部3014设置有检测设备;
机械臂包括第一机械臂与第二机械臂,第一机械臂关节处设置有至少一个第一标志点3013,第二机械臂上设置有至少一个第二标志点3013,第一标志点3013上设置有第一传感器,第二标志点3013上设置有第二传感器,第一传感器用于监测第一机械臂姿态信息,第二传感器用于监测第二机械臂姿态信息;
收集箱102的内部设置有若干干燥设备4012,收集箱102的底部设置有搅动盘4011;
垃圾桶的底部设置有若干过滤层,任二过滤层的中间设置有伸缩机构;
收集箱102的侧壁设置有若干消毒喷头,若干消毒喷头的内部均设置有消毒液,若干消毒喷头均连接有消毒瓶,消毒瓶的内部装有消毒液。
收集箱102的侧壁设置有若干消毒喷头,垃圾暴露在空气中不可避免的会滋生很多细菌,对垃圾进行及时的消毒可以有效避免细菌滋生,同时可以对空气起到一个净化消毒的作用。收集箱102的顶部设置有伸缩盖202,伸缩盖202可以在倾倒垃圾时自动打开,在行驶过程中自动关闭,既能够方便垃圾车进行收集,又可以在行驶过程中避免垃圾掉落,封闭时有效遏制了恶臭气味的扩散。抓取部3014设置有检测设备,可以检测抓取部3014与垃圾桶之间的距离,便于根据距离来计算运动轨迹,顺利完成抓取倾倒。
干燥设备4012的数量与垃圾垃圾间的数量相等,搅动盘4011的数量与垃圾间的数量相等。滑道302与收集箱102等长,箱门的数量与垃圾室401的数量相等。
在此需要说明的一点是,收集箱102的一侧设置有若干箱门,通过打开箱门可以将收集好的垃圾倒出,再进行下一步的集中处理;另一侧固定设置有滑道302,若干机械臂能够沿滑道302滑动,机械臂在抓住垃圾桶后就可以进行移动,移动到对应的垃圾室401之后在进行倾倒,高效完成垃圾分类;
第一关节3011的一端连接有滑动部,滑动部设置于滑道302的内部;第一关节3011的另一端铰接有第二关节3012,第二关节3012连接有抓取部3014,抓取部3014为橡胶材料制成。
在此需要说明的一点是,抓取部3014为橡胶材料制成,摩擦力大,抓取动作稳固,同时还不会损伤垃圾桶。
信号输入设备包括键盘、鼠标、触摸屏、按钮以及声控采集设备的一种或多种的组合;若干干燥设备4012包括风管、干燥灯、吸潮纸,电热丝的一种或多种的组合。
在此需要说明的一点是,控制台包括由信号输入设备,工作人员可以通过信号输入设备来调整整个装置的工作状态,同时可以根据实际情况,实时调整整个装置的功能使用等。工作人员可以通过很多方式对整个装置进行控制,显示屏上可以实时显示车辆周边的图像信息、距离障碍物的数值信息、时间信息、各项传感器检测到的数值等各项信息,便于工作人员实时进行调整。
收集箱102的内部设置有若干隔板402,若干隔板402呈等距间隔排列,隔板402将收集箱102的内部空间分为若干垃圾室401,若干垃圾室401的内部均设置有传感器。
在此需要说明的一点是,隔板402将收集箱102的内部空间分为若干垃圾室401,不同的垃圾桶可以倒在不同的垃圾室401里,这样一来就可以把垃圾分类收集,从而进行分类处理,简洁又高效;若干垃圾室401的内部均设置有传感器,可以实时监测垃圾室401内的垃圾重量,在达到垃圾车的限重值的时候发出预警,避免超重,安全运行。
还包括有若干车轮201,若干车轮201均连接有电机的输出端。
如图5所示,本发明还提供了一种基于无人驾驶的机械臂运动规划方法,应用于任一一种基于无人驾驶的自动收集干燥装置,其特征在于,
采集运动空间信息,建立三维空间坐标系;
根据三维空间坐标系获取第一机械臂与第二机械臂初始位置坐标;
获取第一机械臂初始位置信息,并生成正向位移信号,
根据正向位移信号,生成第一机械臂正向位移量;
获取第二机械臂初始位置信息,生成负向位移信号,
根据负向位移信号,生成第二机械臂负向位移量;
将第一机械臂正向位移量与第二机械臂负向位移量进行绝对值求差计算,得到结果信息;
判断结果信息是否小于预设阈值,
若小于,则生成第一机械臂与第二机械臂夹持信息,通过夹持信息对垃圾桶进行夹持移动;
若大于,则生成位移补偿信息,通过位移补偿信息对第一机械臂正向位移量或/和第二机械臂负向位移量进行补偿。
在此需要说明的一点是,采集运动空间信息,建立三维空间坐标系,根据三维空间坐标系获取两机械臂初始位置坐标,根据运动信息建立两机械臂配合规则,根据配合模型自动生成运动轨迹以及两机械臂之间的相互配合关系,机械臂沿运动轨迹进行移动,精度较高。根据配合模型生成运动轨迹的方法包括可视图法、栅格分解法、随机路标算法和快速随机扩展树方法中的一种,可视图法首先要在操作空间中建立一个可视图,路径规划就是对该可视图进行搜索,得到一条从起始点到终点的不穿越障碍物的路径,栅格分解法将机器人的工作空间分解为多个栅格。由栅格组成连通图,在连通图上搜索一条从起始栅格到目标栅格的路径,随机路标算法是一种快速有效的路径规划算法,一般在位形空间中随机采样进行预处理得到一组随机路标图来表示机器人系统运行的自由空间,然后在此图中为机器人系统搜索到一条可行的路径。快速随机扩展树法是一种增量式前向搜索算法,每次规划是以状态空间中的一个初始点作为根节点,通过随机采样,逐渐增加叶节点的方式,生成一个随机扩展树。当随机树的叶节点中包含了目标点或目标区域中的点,便可在随机树中找到一条以叶节点组成的从初始点到目标点的可达路径。
如图6所示,本发明公开了优先级排序方法流程图。
获取垃圾桶位置信息,并提取垃圾桶边缘线位置信息,
获取第一机械臂初始位置信息与第二机械臂初始位置信息,
将第一机械臂初始位置信息与垃圾桶边缘线位置信息进行比较,得到第一偏差率;
将第二机械臂初始位置信息与垃圾桶边缘线位置信息进行比较,得到第二偏差率;
若第一偏差率小于第二偏差率,则生成优先级排序,第一机械臂运动优先级大于第二机械臂运动优先级;
若第一偏差率大于第二偏差率,则生成优先级排序,第一机械臂运动优先级小于第二机械臂运动优先级。
在此需要说明的一点是,获取垃圾桶边缘位置信息,分别判断垃圾桶与第一机械臂、第二机械臂的距离,距离较近的机械臂首先进行移动至垃圾桶附近,生成机械臂优先运动排序,保证控制机械臂精准灵活。
如图7所示,本发明公开了获取机械臂运动量方法流程图。
获取机械臂参数信息,建立机械臂关节标志点3013,生成标志点3013信息;
采集垃圾桶位置信息,根据垃圾桶位置信息,生成标志点3013弯折姿态信息;
根据标志点3013弯折姿态信息,建立机械臂运动模型,
根据机械臂运动模型生成运动方式,得到机械臂运动量信息;
根据机械臂运动量信息进行机械臂适配性运动。
在此需要说明的一点是,通过在机械臂的关节处设置标志点3013,标志点3013处通过传感器监测机械臂姿态信息,标志点3013处监测的姿态信息更加接近机械臂实际运动信息,监测精度较高,更加有利于机械臂运动轨迹的规划。
本发明工作时,控制方法如下所示。
获取垃圾桶位置信息,根据地图算法,计算最优路线,根据最优路线生成移动指令;
根据垃圾桶位置信息,计算抓取手301位置修正数据,生成抓取指令;
获取抓取部3014与垃圾桶的距离a,当a小于预定阈值时,生成位移指令;
采集位移完毕信号,识别垃圾桶颜色信息b,计算b的色度值,获取垃圾间的目标色度信息,生成对应匹配的移动指令;
获取移动完毕信号,生成倾倒指令;
计算倾倒时间t,若t大于预定阈值,则生成垃圾桶复位指令;
获取复位信息,生成搅动干燥指令;
计算搅动干燥时间t0,当t0大于预定阈值时,生成停止搅动指令;
根据垃圾桶复位指令,对垃圾桶位置进行复位。
本发明采用的是无人驾驶自动收集垃圾桶内的垃圾的方式,节省了大量的人力物力,同时还可以对不同的垃圾桶进行识别,根据垃圾桶的颜色识别出其对应的垃圾类型,分类收集后集中处理,高效完成工作,无需人员实时操纵,大量节约了人员劳动力,且采用全自动化的控制,保证整个流程完整高效地运行,同时还可以在垃圾倾倒后进行一定程度的消毒灭菌等;及时针对已经装满垃圾的垃圾桶进行清理,避免了恶臭气味的形成,同时也是能够更好地维护市容市貌,整个过程仅需很少的时间就可以完成,同时不影响用户继续使用垃圾桶。收集箱102的内部设置有若干干燥设备4012,可以对垃圾进行干燥处理,避免产生垃圾臭水等,减少细菌的滋生;收集箱102的底部设置有搅动盘4011,对垃圾进行搅动,可以加速垃圾的干燥;垃圾桶的底部设置有若干过滤层,使垃圾桶内的垃圾进行过滤处理,干燥更快;任二过滤层的中间设置有伸缩机构,过滤层可以上下移动,避免堵塞。
以上实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 一种基于无人驾驶的自动收集干燥装置及其机械臂运动规划方法
- 无人驾驶车辆的运动规划方法和运动规划装置