远程控制设备及远程控制系统
文献发布时间:2023-06-19 10:52:42
技术领域
本公开的主题涉及一种用于远程控制医疗设备的功能的远程控制设备。本公开的主题还涉及一种包括医疗设备和远程控制设备的远程控制系统。
背景技术
日本专利公开No.2018-102671A公开了作为医疗设备的实例的生命体征信息监测器。生命体征信息监测器设置在患者或受试者身旁,使得附接于患者或受试者的传感器等连接至生命体征信息监测器。通过传感器获取的患者或受试者的生命体征信息用于通过生命体征信息监测器的监测或显示。当生命体征信息指示从患者或受试者的正常状态偏离时,生命体征信息监测器输出警报以对医护人员进行通知。医护人员通过向生命体征信息监测器输入预定指令来取消通知操作。
在如上所述的生命体征信息监测器的情况下,每当发生非预期的通知操作时,都需要到生命体征信息监测器的安装位置并且输入用于取消通知操作的指令。因此,不可避免的是,治疗行动和护理工作的表现变差。该表现变差在手术室、新生儿重症监护室(NICU)和其它需要增加清洁度的环境中尤其显著。这是因为每当执行生命体征信息监测器的操作时都需要消毒手指等。
因此,需要抑制由医疗设备的操作引起的治疗行动或护理工作的表现变差。
发明内容
本公开的主题的说明性方面提供了一种远程控制设备,包括:
存储器,其存储与被指定给医疗设备的功能的医护人员的姿势、语音和身体特征中的至少一者相对应的信息;
传感器,其被配置为检测姿势、语音和身体特征中的至少一者;
发送器,其被配置为无线发送用于远程控制所述功能的信号;以及
处理器,其被配置为在与所述信息相对应的所述姿势、所述语音和所述身体特征中的所述至少一者由所述传感器检测到的情况下,所述处理器使所述发送器发送所述信号。
本公开的主题的说明性方面提供了一种远程控制系统,包括:
医疗设备;和
远程控制设备,所述远程控制设备被配置为远程地控制所述医疗设备的功能;
其中,所述医疗设备包括:
存储器,其存储与被指定给所述功能的医护人员的姿势、语音和身体特征中的至少一者相对应的信息;
传感器,其被配置为检测姿势、语音和身体特征中的至少一者;
发送器,其被配置为无线发送用于远程控制所述功能的信号;以及
处理器,其被配置为在与所述信息相对应的所述姿势、所述语音和所述身体特征中的所述至少一者由所述传感器检测到的情况下,所述处理器使所述发送器发送所述信号。
根据如上所述的配置,由于远程控制设备通过感测医护人员的姿势、语音和身体特征中的至少一者来无线地发送用于控制医疗设备的功能的信号,所以医护人员能够以最小必要动作控制医疗设备的功能,而无需直接碰触远程控制设备或医疗设备。因此,能够抑制由医疗设备的操作引起的治疗行动和护理工作的表现变差。特别是在需要高清洁度的环境中,例如手术室或新生儿重症监护室(NICU),由于减少对消毒工作的需求,上述效果变得更加显著。
附图说明
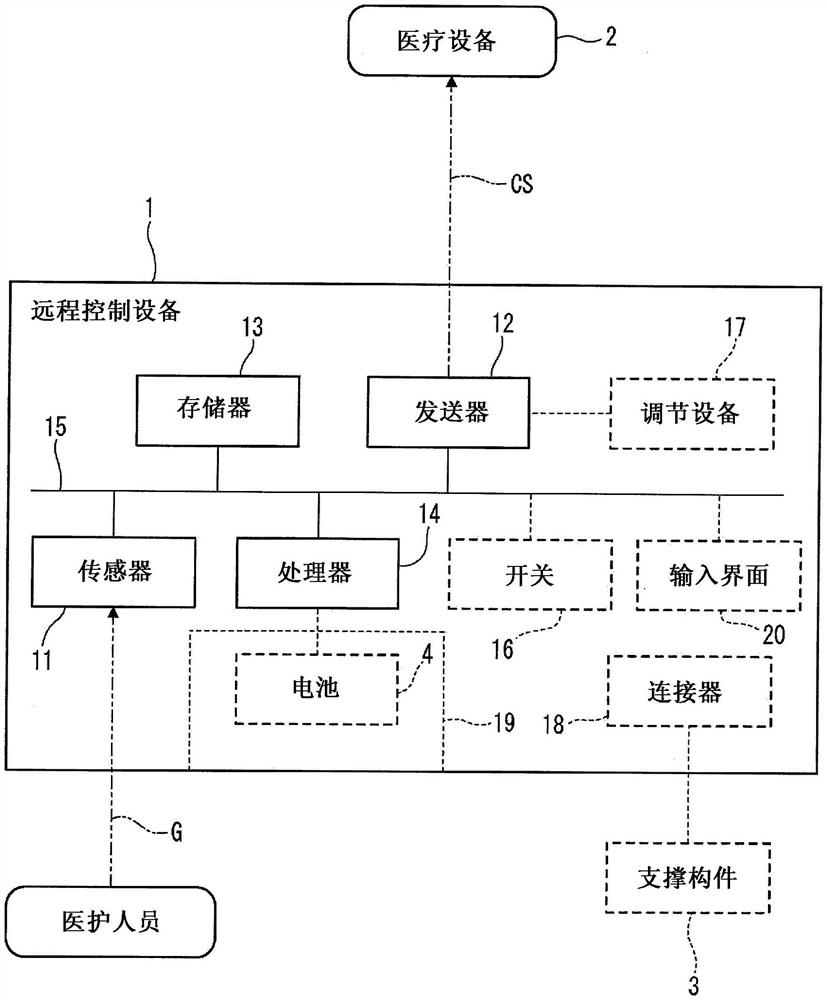
图1示出了根据实施例的远程控制设备的功能配置。
图2示出了图1的远程控制设备的外观。
图3示出了图1的远程控制设备的外观。
图4示出了图1的远程控制设备的操作。
图5示出了图1的远程控制设备的操作。
具体实施方式
下面参照附图详细描述实施例的实例。图1示出了根据实施例的远程控制设备1的功能配置。图2和3示出了包括远程控制设备1的壳体10的外观。远程控制设备1是用于通过无线通信在远程位置处远程控制医疗设备2的功能这样的设备。远程控制设备1和医疗设备2可以构成远程控制系统。
医疗设备2的实例包括生命体征信息监测器和诸如麻醉设备和输液设备这样的手术辅助设备。医疗设备2的功能的实例包括打开/关闭电源、改变要在显示器上显示的信息项、改变要在显示器上显示的信息项的外观、改变诸如警报这样的通知的方式、执行或取消设备特有的操作以及改变各种设置。
如图1所示,远程控制设备1包括传感器11。传感器11被配置为检测医护人员的姿势G。如图2所示,传感器11例如设置在壳体10的正面10a上。
如本文所使用的,表述“医护人员的姿势”是指医护人员有意地使用他或她的身体的一部分执行的动作。姿势的实例可以包括将手保持在特定位置上,在预定方向上移动食指,交叉双手的手指,摆动头部,使脸靠近传感器移动,手臂上下移动,将膝盖升高到臀部高度等。
传感器11可以被配置为能够识别预定姿势G的公知传感器。例如,如果仅需要检测到医护人员已经将他/她的手保持在壳体10上的事实,则传感器11可以由使用红外线等的距离传感器来实现。如果需要检测医护人员的身体部位的移动方向或移动量,则传感器11可以由运动传感器、成像设备等来实现。
如图1所示,远程控制设备1包括发送器12。发送器12被配置为无线发送用于控制医疗设备2的功能的控制信号CS。如图3所示,发送器12例如设置在壳体10的背面10b上。发送器12可以被配置为能够发送无线电信号的公知设备。无线信号的实例包括诸如红外线这样的具有预定波长的光信号,以及用于无线通信的无线电波信号,诸如NFC(近场通信)或蓝牙(注册商标)通信。
如图1所示,远程控制设备1包括存储器13、处理器14和通信总线15。传感器11、发送器12、存储器13和处理器14能够经由通信总线15彼此通信信号和数据。虽然未示出,但远程控制设备1包括适当的信号转换电路,该信号转换电路在执行分配给传感器11、发送器12、存储器13和处理器14的预定操作的同时,使得能够进行这样的通信。这样的信号转换电路的实例包括A/D转换器、D/A转换器和频率滤波器。
存储器13和处理器14可以是彼此协作的通用微处理器和通用存储器。通用微处理器的实例包括CPU和MPU。通用存储器的实例包括ROM和RAM。存储器13和处理器14可以被实现为诸如微计算机、ASIC和FPGA这样的专用集成电路的一部分。
存储器13存储与被指定给受控的医疗设备2的功能的医护人员的姿势G相对应的姿势信息。具体地,姿势信息与控制信息在存储器13中相关联,所述姿势信息表示通过姿势G获得的传感器11的输出,所述控制信息使得发送器12发送用于使医疗设备2的警报输出停止的控制信号CS。
当传感器11检测到与存储器13中存储的姿势信息相对应的医护人员的姿势G时,处理器14被配置为使发送器12发送对应于姿势G的控制医疗设备2的功能的控制信号CS。具体地,处理器14判定来自传感器11的信号输出是否对应于存储在存储器13中的姿势信息。当确认对应时,处理器14判定传感器11检测到了用于控制医疗设备2的功能的姿势G。基于该判定,处理器14使发送器12发送与存储器13中的姿势G相关联的控制信号CS。
图4示出了如上所述地配置的远程控制设备1的操作的实例。在该实例中,医护人员将他/她的手保持在远程控制设备1上的姿势G被分配为用于使从作为医疗设备2的生命体征信息监测器输出的警报停止的功能。
当生命体征信息监测器所监测的受试者或患者的状态偏离正常状况时,生命体征信息监测器输出预定警报以向医务人员进行通知。已经接收到通知的医护人员将他/她的手保持在远程控制设备1上。传感器11检测医护人员的姿势并输出与姿势相对应的信号。处理器14判定该信号是否对应于存储在存储器13中的预定姿势信息。
在所示的实例中,医护人员的姿势与存储在存储器13中的预定姿势信息相对应。因此,处理器14使发送器12(未示出)传送用于停止生命体征信息监测器的警报输出的控制信号CS。作为医疗设备2的生命体征信息监测器包括能够接收无线传输的控制信号CS的接收器(未示出)。生命体征信息监测器被配置为响应于由接收器接收的控制信号CS而控制其自身的操作。在该实例中,生命体征信息监测器响应于控制信号CS的接收而停止警报输出。
即使医护人员执行将他/她的手保持在特定位置之外的姿势,该姿势也能够由传感器11检测到。然而,根据姿势从传感器11输出的信号不对应于存储在存储器13中的预定姿势信息。因此,处理器14判定传感器11未检测到预定姿势。因此,不从发送器12发送停止生命体征信息监测器的警报输出的控制信号CS。
根据如上所述的配置,由于远程控制设备1通过感测医护人员的姿势G而无线发送用于控制医疗设备2的功能的控制信号CS,所以医护人员能够以最小的必要动作来控制医疗设备2的功能,而无需直接碰触远程控制设备1或医疗设备2。因此,能够抑制由医疗设备2的操作所引起的治疗行动和护理工作的表现变差。特别是在需要高清洁度的环境中,例如手术室或新生儿重症监护室(NICU),由于减少了对消毒工作的需要,上述效果变得更加显著。
如图1所示,远程控制设备1可以包括开关16。开关16可以包括至少一个按钮开关、指拨开关等。开关16可以设置在壳体10中或者可以设置在壳体10的外表面上。
开关16可以被配置为将医护人员的特定姿势G分配给医疗设备2中的多个功能中的每一个功能,作为姿势信息,并且将姿势信息存储在存储器13中。
例如,如图5所示,可以根据开关16的状态在远程控制设备1中设置多个信道。在所示的实例中,设置了N个信道。第一信道、第二信道和第N信道分别分配给医疗设备21的第一功能、第二功能和第N功能。第一功能例如是用于停止警报输出的功能。第二功能例如是接通电源的功能。第N功能例如是关闭电源的功能。
医护人员的特定姿势可被分配给N个信道中的每个信道。例如,“将手保持在特定位置”的姿势可以被分配给第一信道,“向上移动手”的姿势可以被分配给第二信道,并且“向下移动手”的姿势可以被分配给第N信道。
这样的姿势的分配能够例如通过以下过程来执行。
·通过向远程控制设备1输入预定指令来启用学习模式。
·操作开关16以设置对应于特定信道的状态。
·使传感器11检测期望分配给信道的姿势。
·通过向远程控制设备1输入预定指令来终止学习模式。
结果,与特定姿势相对应的传感器11的输出信号作为要存储在存储器13中的用于各个信道的姿势信息而被分配给特定信道。
在执行这样的设定操作之后,例如,当传感器11检测到医护人员的“手向下移动”的姿势时,处理器14使发送器12发送用于关闭医疗设备21的电源的控制信号CS。因此,远离远程控制设备1定位的医疗设备21的电源被关闭。
根据这样的配置,医护人员能够控制医疗设备2的多个功能,而无需直接碰触远程控制设备1或医疗设备2。因此,增强了如下效果:抑制医疗设备2的操作所引起的治疗行动和护理工作的表现变差。
作为附加或替代,开关16可以被配置为将医护人员的特定姿势G分配给多个医疗设备21、22、...、2N中的每一个医疗设备中的特定功能,作为姿势信息,并且将该姿势信息存储在存储器13中。
例如,如图5中的虚线所示,第一信道、第二信道和第N信道分别分配给医疗设备21的第一功能、医疗设备22的第一功能和医疗设备2N的第一功能。第一功能例如是用于停止警报输出的功能。
同样在这种情况下,医护人员的特定姿势可以被分配给N个信道中的每一个信道。例如,“将手保持在特定位置”的姿势可以被分配给第一信道,“手向上移动”的姿势可以被分配给第二信道,并且“手向下移动”的姿势可以被分配给第N信道。姿势的分配可以以上文所描述的过程执行。
在执行这样的设定操作之后,例如,当传感器11检测到医护人员的“手向下移动”的姿势时,处理器14使发送器12发送用于使医疗设备2N停止警报输出的控制信号CS。因此,远离远程控制设备1定位的医疗设备2N的警报输出被停止。
根据这样的配置,医护人员能够控制多个医疗设备2的功能而无需直接碰触远程控制设备1或医疗设备2。因此,增强了如下效果:抑制医疗设备2的操作引起的治疗行动和护理工作的表现变差。
在多个医疗设备2的功能由单个远程控制设备1控制的情况下,可以适当地确定要在每个医疗设备中控制的功能的数量。在图5所示的实例中,远程控制设备1的第三信道被分配给医疗设备22的第二功能。即,在医疗设备22中,两个功能能够被远程控制。
在上述每个实例中,远程控制设备1控制用于停止医疗设备2的警报输出的功能。用于停止警报输出的功能是用于限制警报输出的功能的实例。用于限制警报输出的功能可以包括用于暂停警报输出达预定时间段的功能或用于禁用警报输出的功能。
当从医疗设备2输出警报时,医护人员很有可能处于需要紧急响应的情境下。根据上述配置,能够抑制在这种情况下由于医疗设备2的操作所引起的治疗行动或护理工作的表现变差,使得能够支持医护人员的紧急响应。
如图1所示,远程控制设备1可以包括调节设备17。调节设备17是用于改变从发送器12发送控制信号CS的方向的设备。例如,如图2和3所示,调节设备17可以包括设置在壳体10上的旋钮17a。旋钮17a可连接到设置在壳体10中的发送器12。在这种情况下,医护人员能够通过旋转旋钮17a来改变图2所示的发送器12的传输中心轴线12a的方向。传输中心轴线12a是在从发送器12发送的控制信号CS的信号强度最强的角方向上延伸的轴线。
例如,图4中的虚线所示的医疗设备2在初始状态下未定位在传输中心轴线12a的延长线上。在这种情况下,医护人员能够通过旋转调节设备17的旋钮17a来将传输中心轴线12a调节为面向由虚线示出的医疗设备2。因此,从发送器12发送的由虚线指示的控制信号CS朝向由虚线指示的医疗设备2发送。
根据这样的配置,能够根据远程控制设备1和医疗设备2被安装的位置的布局以及医护人员的操作路线,以相对高的自由度确定远程控制设备1与医疗设备2之间的位置关系。因此,增强了如下效果:抑制医疗设备2的操作引起的治疗行动和护理工作的表现变差。
如图1所示,远程控制设备1可以包括连接器18。连接器18被构造为以可拆卸的方式装接到支撑构件3,该支撑构件3用于将远程控制设备1的壳体10固定到期望的位置。例如,如图3所示,连接器18可以是形成在壳体10的背面10b中的螺纹孔。螺纹孔可以符合例如1/4-20UNC统一螺钉标准。支撑构件3设置有配合到螺纹孔中的螺纹部、能够固定到期望位置的夹具等。图4示出了支撑构件3连接到远程控制设备1的壳体10的状态。
根据这样的配置,确定远程控制设备1的布置的自由度增加。因此,增强了如下效果:抑制医疗设备2的操作引起的治疗行动和护理工作的表现变差。
如图1所示,远程控制设备1可以包括电池容纳部19。电池容纳部19被构造为容纳用于至少向处理器14供电的电池4。例如,如图2和3所示,可拆卸电池盖10c可装接到壳体10的背面10b。通过移开电池盖10c,能够打开电池容纳部19。容纳在电池容纳部19中的电池可以是一次电池或二次电池。
根据这样的配置,不必考虑与经由线缆连接的商业电源的位置关系,使得确定远程控制设备1的布置的自由度增加。因此,增强了如下效果:抑制医疗设备2的操作引起的治疗行动和护理工作的表现变差。
远程控制设备1和医疗设备2可以具有用于建立控制-被控制关系的配对功能。例如,如图1所示,远程控制设备1可以包括输入界面20。医护人员通过输入界面20输入识别由控制信号CS控制的医疗设备2的信息。作为附加或替代,可以在医疗设备2侧设置类似的输入界面。在这种情况下,医护人员通过输入界面输入指定发送控制信号CS的远程控制设备1的信息。因此,基于输入到远程控制设备1和医疗设备2中的至少一者的信息,来建立远程控制设备1与医疗设备2之间的配对。
根据这样的配置,仅在已建立配对的特定远程控制设备1与医疗设备2之间启用远程控制。因此,能够避免由于远程控制设备1所发送的控制信号CS而意外地操作除特定医疗设备2以外的医疗设备的情况。
以上实施例仅仅是实例性的,以有助于对本公开的主题的理解。在不脱离本公开的主题的基本概念的情况下,根据以上实施例的配置可以被适当地修改或改进。
在上述实施例中,由传感器11检测医护人员的姿势。作为附加或替代,可以用传感器11检测医护人员的语音和/或身体特征。作为身体特征,可以例示视网膜、指纹、面部等。在这种情况下,传感器11可以由语音识别传感器、指纹传感器、视网膜传感器等来实现。即使具有这样的配置,也能够通过使用对远程控制设备1的非接触输入作为触发器,而远程控制医疗设备2的功能。
本申请基于2018年9月28日提交的日本专利申请No.2018-184191,其全部内容通过引用并入本文。
- 远程控制设备、远程控制方法和远程控制系统
- 远程控制设备的方法及远程控制系统