一种智能调味罐组件、控制系统及控制方法
文献发布时间:2023-06-19 11:06:50
技术领域
本发明属于调味罐技术领域,特别是涉及一种智能调味罐组件、控制系统及控制方法。
背景技术
随机科技日益发展,为了方便人们烹饪菜肴,智能调味罐组件被研发了出来,但是现在国内智能调味罐组件的普及程度并不高。因此,相关行业人士认为,智能调味罐组件多媒体科技教学设备在以后将会在中国进入大量普及的阶段,甚至会出现井喷现象。这是必然趋势。
现有的调味罐大多都是只具备存放效用,无法对存放的调味品状态进行检测,经常会出现存放的调味品受湿度或受温度破坏而无法使用的情况。而且现有的调味罐无法在存放的调味品余量时对用户进行提醒,只能依靠用户使用时肉眼观测和手持感触得知,经常会出现开始烹饪才发现没有调料的情况。因此亟待研究一种智能调味罐组件、控制系统及控制方法,以解决上述问题。
发明内容
本发明在于提供一种智能调味罐组件、控制系统及控制方法,其目的是为了解决上述背景技术中所提出的问题。
为解决上述技术问题,本发明是通过以下技术方案实现的:
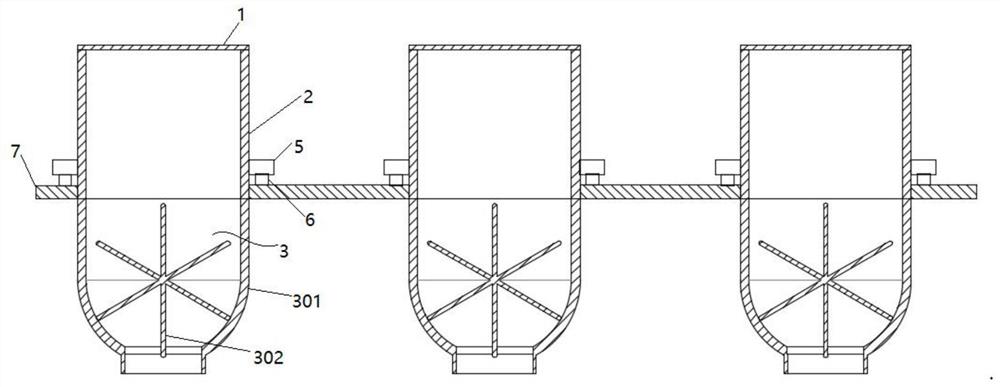
本发明为一种智能调味罐组件,包括水平设置的安装板、安装在安装板上的控制器和多个竖直穿插在安装板上的罐体;所述罐体的上部具有一开口结构,所述开口结构内配合有一罐盖;所述罐体外侧设有称重传感器;所述称重传感器与控制器电性连接;所述称重传感器用于对罐体进行称重;所述罐体的下部具有一出料口;所述出料口的上方安装有一相对应的下料部件;所述下料部件设置在罐体内;所述下料部件用于将罐体内的物料推至出料口处。
进一步地,所述罐体外侧壁安装有显示屏;所述显示屏与控制器电性连接。
进一步地,所述罐体内侧壁固定内嵌有温度传感器;所述温度传感器用于对罐体内的物料进行测温;所述温度传感器输出端与控制器电性连接。
进一步地,所述罐体内侧壁固定内嵌有湿度传感器;所述湿度传感器用于对罐体内的物料湿度进行测量;所述湿度传感器输出端与控制器电性连接。
进一步地,所述罐体外部固定套设有卡箍;所述卡箍设置于安装板的上方;所述称重传感器安装于卡箍与安装板之间。
进一步地,所述罐体的下部为球面型结构;所述下料部件设置在罐体的下部;所述下料部件包括水平转动连接于罐体下部内的支杆,所述支杆的中轴线与球面型结构的圆心重合设置;所述支杆上沿径向固定有多个呈半圆形结构的拨料片;所述拨料片的外边缘与罐体的内侧壁相抵。
进一步地,所述支杆的一端贯穿延伸至罐体的外部并固定于一步进电机的输出端;所述步进电机固定在卡箍上;所述步进电机与控制器电性连接;所述支杆上安装有一角度传感器,所述角度传感器用于对支杆的旋转角度进行监测。
进一步地。所述支杆的一端贯穿延伸至罐体的外部并与一把手固定连接。
一种智能调味罐组件的控制系统,包括控制器、称重传感器、湿度传感器、温度传感器、角度传感器、显示屏、步进电机和电池模块;所述控制器分别与称重传感器、湿度传感器、温度传感器、角度传感器、显示屏、步进电机和电池模块电性连接。
一种智能调味罐组件的控制方法,包括如下步骤:
步骤一、通过转动支杆来带动拨料片将罐体内的部分物料推至下料口,称重传感器对罐体内的剩余物料进行实时监测并反馈至显示屏;当显示屏显示出下料量为一克时,停止转动支杆,角度传感器检测出支杆的旋转角度并反馈至控制器,控制器将该旋转角度记录为基准角度;
步骤二、当用户需要多少克物料时,通过显示屏输入使用量,显示屏将使用量反馈至控制器,并根据以下公式进行下料:
电机输出轴旋转角度=基准角度×使用量
从而实现对物料的精准下料。
本发明具有以下有益效果:
本发明通过设有的重量、温度、湿度传感器对内部储存的调味品状态进行检测并呈现在外表面的显示屏和用户的移动设备上,当状态超出或低于设定范围时,通过显示屏及用户移动设备发出报警信号,避免了存放的调味品因环境问题遭到破坏,也避免了调味品用完没有及时得到补充的情况的发生。
当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明结构示意图;
图2为本发明剖视图;
图3为下料部件结构示意图;
图4为具体实施例一的结构示意图;
图5为具体实施例二的结构示意图;
图6为控制系统的原理框图;
附图中,各标号所代表的部件列表如下:
1-罐盖,2-罐体,3-下料部件,4-显示屏,5-卡箍,6-称重传感器,7-安装板,8-电池模块,301-外壁,302-拨料片,303-支杆,304-把手,305-下料口,306-步进电机。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
具体实施例一:
请参阅图1-4所示,本发明为一种智能调味罐组件,包括水平设置的安装板7、安装在安装板7上的控制器及电池模块8和多个竖直穿插在安装板7上的罐体2;罐体2的上部具有一开口结构,开口结构内配合有一罐盖1;罐体2外侧设有称重传感器6;称重传感器采用XFC205R型号;称重传感器6与控制器电性连接;称重传感器6用于对罐体2及内部物料进行称重;罐体2的下部具有一出料口305;出料口的上方安装有一相对应的下料部件3;下料部件3设置在罐体2内;下料部件3用于将罐体2内的物料推至出料口305处;通过对整体罐体重量进行测量,通过控制器将每次用量及余量计算出来并精确到克;控制器还用于将物料的用量及剩余量发送到用户的移动终端;电池模块8包括电池盒和多个并排安装于电池盒内的电池;电池为本领域的常规干电池或锂蓄电池。
其中,罐体2外侧壁安装有显示屏4;显示屏4与控制器电性连接。控制器将收集到的数据计算后呈现到显示屏上;罐体2内侧壁固定内嵌有温度传感器;湿度传感器采用MY605+型号;温度传感器用于对罐体2内的物料进行测温;温度传感器输出端与控制器电性连接;罐体2内侧壁固定内嵌有湿度传感器;湿度传感器采用M601Z型号;湿度传感器用于对罐体2内的物料湿度进行测量;湿度传感器输出端与控制器电性连接;罐体2外部固定套设有卡箍5;卡箍5设置于安装板7的上方;称重传感器6安装于卡箍5与安装板7之间;控制器将测量到的温湿度情况显示在显示屏上并发送到用户的移动终端。
其中,罐体2的下部为球面型结构;下料部件3设置在罐体2的下部;下料部件包括水平转动连接于罐体下部内的支杆303,支杆303的中轴线与球面型结构的圆心重合设置;支杆303上沿径向固定有多个呈半圆形结构的拨料片302;拨料片302的外边缘与罐体2的内侧壁相抵;下料组件3与罐体下部尺寸配合保证了闲置时内部的封闭性,可以有效的防潮,防止物料洒出。
其中,支杆303的一端贯穿延伸至罐体2的外部并固定于一步进电机306的输出端;步进电机306固定在电池盒的一表面上;步进电机306与控制器电性连接;支杆303上安装有一角度传感器,角度传感器用于对支杆303的旋转角度进行监测;角度传感器采用G-MRCO-015型号。
一种智能调味罐组件的控制系统,包括控制器、称重传感器6、湿度传感器、温度传感器、角度传感器、显示屏4、步进电机306和电池模块8;控制器分别与称重传感器6、湿度传感器、温度传感器、角度传感器、显示屏4、步进电机306和电池模块8电性连接;控制器还电性连接有联网模块,联网模块用于与移动终端建立通信连接,以方便向移动终端传输物料每天的用量及剩余量和调味罐内部的温湿度情况;联网模块采用本领域常规元件。
一种智能调味罐组件的控制方法,包括如下步骤:
步骤一、通过转动支杆303来带动拨料片302将罐体2内的部分物料推至下料口305,称重传感器6对罐体2内的剩余物料进行实时监测并反馈至显示屏4;当显示屏4显示出下料量为一克时,停止转动支杆303,角度传感器检测出支杆303的旋转角度并反馈至控制器,控制器将该旋转角度记录为基准角度;
步骤二、当用户需要多少克物料时,通过显示屏4输入使用量,显示屏4将使用量反馈至控制器,并根据以下公式进行下料:
电机输出轴旋转角度=基准角度×使用量
从而实现对物料的精准下料。
具体实施例二:
支杆303的一端贯穿延伸至罐体2的外部并与一把手304固定连接;把手304呈圆柱形结构,周侧径向均布固定有多个把持杆;通过设置有可手动操作的把手304,免去了常规调味罐需要打开取料的繁琐。
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
- 一种智能调味罐组件、控制系统及控制方法
- 一种机器人组件的智能化联动控制系统及控制方法