一种履带式侦察机器人的稳定移动平台
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及机器人技术领域,具体为一种履带式侦察机器人的稳定移动平台。
背景技术
当今,各类突发事件对社会的稳定和人民生命的安全构成了极大的威胁,因此,大力发展面向突发事件的应急装备对打击恐怖性突发事件、维护社会稳定的意义重大,故侦察机器人应运而生,目前侦察机器人移动方式主要包括履带式、多足式与轮式。履带式与多足式移动能适应各种地形,多足式的越障能力使其可以在绝大多数地形中运行;而履带式则在稳定性方面更胜一筹,轮式与其相比有很多不足,但在平滑的室内环境下轮式的速度与稳定性优势更好;而履带式的速度劣势就暴露出来了,所以需要对履带式侦察机器人的底盘稳定性进行改进,使其运行速度增加,故亟需设计一种新型稳定移动平台,基于此,本发明设计了一种履带式侦察机器人的稳定移动平台,以解决上述问题。
发明内容
本发明的目的在于提供一种履带式侦察机器人的稳定移动平台,以解决上述背景技术中提出的需要对履带式侦察机器人的底盘稳定性进行改进,使其运行速度增加的问题。
为实现上述目的,本发明提供如下技术方案:一种履带式侦察机器人的稳定移动平台,包括机器人本体,所述机器人本体的底盘左右两侧前方均相对安装有驱动轴,所述机器人本体的底盘左右两侧后方均间隔均匀相对安装有若干从动轴,且驱动轴和从动轴平齐,所述驱动轴和从动轴的外端均同轴固定连接有移动轮,且移动轮的横截面呈T型,两侧若干所述移动轮之间安装有履带,所述履带与机器人本体的底盘侧面之间通过悬架装置连接;
所述悬架装置包括纵截面呈T型的连接环、移动装置、横置的L型连接板、L型移动块、第一电插锁和第二电插锁,所述连接环可拆卸套接在移动轮上,所述连接环的外表面通过焊接凸块与履带连接,所述连接环的侧面焊接有移动装置,所述移动装置悬空套接在驱动轴和从动轴上,所述L型移动块滑动套接在驱动轴和从动轴外壁上,所述L型移动块位于移动装置外侧,所述L型连接板水平焊接在移动装置上,所述L型连接板的另一端通过凹槽与L型移动块的内壁下部插接,所述第一电插锁竖向固定连接在L型移动块的内壁上部,所述第一电插锁的插销与L型连接板的上表面固定连接,所述机器人本体的底盘侧面通过第二电插锁与L型移动块侧壁固定连接;
所述移动装置包括安装圈、锥形套、圆滑槽、若干L型拉杆、若干万向球、限位圈和若干连接轴承,所述圆滑槽同轴设置在安装圈内端面上,所述安装圈与连接环焊接,若干所述L型拉杆呈圆周均匀间隔水平焊接在锥形套端面,所述万向球固定安装在L型拉杆内壁上,所述限位圈固定连接在圆滑槽内壁上,所述万向球与限位圈内壁滑动贴合,所述连接轴承固定套接在L型拉杆外壁上,所述连接轴承通过浅槽与圆滑槽内壁滑动连接,所述连接轴承位于限位圈外侧。
进一步的,所述机器人本体还包括有无线视频监控系统。
进一步的,所述L型移动块的底部垂直固定连接有第三电插锁,所述第三电插锁的插销底部固定连接有顶杆,所述第三电插锁通过无线远程控制开关与机器人本体的蓄电池电连接。
进一步的,所述机器人本体的外壳表面还固定连接有另外两组无线远程控制开关,且无线远程控制开关分别串接在机器人本体的蓄电池与第一电插锁和第二电插锁之间。
进一步的,所述连接环的外侧面通过设置耐磨防滑纹路与移动轮侧壁贴合。
进一步的,所述L型移动块的水平通孔内腔固定套接有耐磨套。
与现有技术相比,本发明的有益效果是:本发明通过正常状态下履带的安装位置使侦察机器人在凹凸地面运行时,稳定性强,当需要在平滑地面上运行时,利用第二电插锁收缩,使L型移动块内移,进而移动轮与连接环分离,再利用第一电插锁收缩,使履带上移,移动轮触地,操作机器人本体使驱动轴工作,进而在平滑地面上可以快速平稳移动,该装置操作方便,使侦察机器人在不同路况的地面运行更加稳定。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
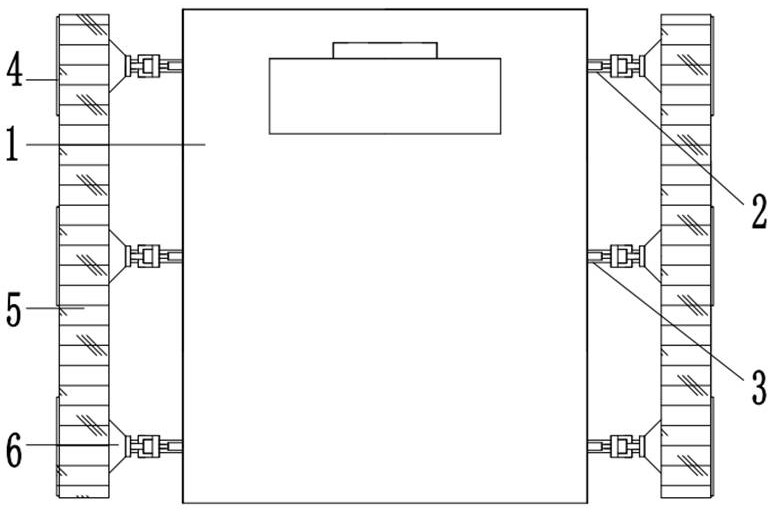
图1为本发明结构示意图;
图2为本发明图1中悬架装置结构示意图;
图3为本发明图2中移动装置结构示意图。
附图中,各标号所代表的部件列表如下:
机器人本体1、驱动轴2、从动轴3、移动轮4、履带5、悬架装置6、连接环60、移动装置61、L型连接板62、L型移动块63、第一电插锁64、第二电插锁65、第三电插锁66、顶杆67、安装圈610、锥形套611、圆滑槽612、L型拉杆613、万向球614、限位圈615、连接轴承616。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
请参阅图1-3,本发明提供一种技术方案:一种履带式侦察机器人的稳定移动平台,包括机器人本体1,机器人本体1的底盘左右两侧前方均相对安装有驱动轴2,机器人本体1的底盘左右两侧后方均间隔均匀相对安装有若干从动轴3,且驱动轴2和从动轴3平齐,驱动轴2和从动轴3的外端均同轴固定连接有移动轮4,且移动轮4的横截面呈T型,两侧若干移动轮4之间安装有履带5,履带5与机器人本体1的底盘侧面之间通过悬架装置6连接;
悬架装置6包括纵截面呈T型的连接环60、移动装置61、横置的L型连接板62、L型移动块63、第一电插锁64和第二电插锁65,连接环60可拆卸套接在移动轮4上,连接环60的外表面通过焊接凸块与履带5连接,连接环60的侧面焊接有移动装置61,移动装置61悬空套接在驱动轴2和从动轴3上,L型移动块63滑动套接在驱动轴2和从动轴3外壁上,L型移动块63位于移动装置61外侧,L型连接板62水平焊接在移动装置61上,L型连接板62的另一端通过凹槽与L型移动块63的内壁下部插接,第一电插锁64竖向固定连接在L型移动块63的内壁上部,第一电插锁64的插销与L型连接板62的上表面固定连接,机器人本体1的底盘侧面通过第二电插锁65与L型移动块63侧壁固定连接;
移动装置61包括安装圈610、锥形套611、圆滑槽612、若干L型拉杆613、若干万向球614、限位圈615和若干连接轴承616,圆滑槽612同轴设置在安装圈610内端面上,安装圈610与连接环60焊接,若干L型拉杆613呈圆周均匀间隔水平焊接在锥形套611端面,万向球614固定安装在L型拉杆613内壁上,限位圈615固定连接在圆滑槽612内壁上,万向球614与限位圈615内壁滑动贴合,连接轴承616固定套接在L型拉杆613外壁上,连接轴承616通过浅槽与圆滑槽612内壁滑动连接,连接轴承616位于限位圈615外侧。
其中,机器人本体1还包括有无线视频监控系统,可以判断前方路况,进行履带5位置变化。
L型移动块63的底部垂直固定连接有第三电插锁66,第三电插锁66的插销底部固定连接有顶杆67,第三电插锁66通过无线远程控制开关与机器人本体1的蓄电池电连接,需要重新连接履带5时,通过第三电插锁66带动顶杆67伸长,使底盘整体抬起,再使第一电插锁64伸长,L型移动块63外移即可,减少履带5与地面的阻力。
机器人本体1的外壳表面还固定连接有另外两组无线远程控制开关,且无线远程控制开关分别串接在机器人本体1的蓄电池与第一电插锁64和第二电插锁65之间,便于远程控制。
连接环60的外侧面通过设置耐磨防滑纹路与移动轮4侧壁贴合,提高摩擦力,进而使履带5拥有高转速。
L型移动块63的水平通孔内腔固定套接有耐磨套,防止L型移动块63磨损移位,影响移动轮4与连接环60的配合。
通过机器人本体1的动力系统使驱动轴2转动,进而由于摩擦,利用驱动轴2上的移动轮4带动连接环60转动,如图2所示,移动装置61用于连接环60的限位,进而履带5转动,可以在凹凸地面稳定移动;
当需要在平滑地面上运行时,先停车,再利用第二电插锁65收缩,使L型移动块63内移,进而移动轮4与连接环60分离,再利用第一电插锁64收缩,使履带5上移,移动轮4触地,操作机器人本体1使驱动轴2工作,进而在平滑地面上可以快速平稳移动。
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
- 一种履带式侦察机器人的稳定移动平台
- 一种履带式侦察机器人的齿轮箱密封结构