一种基于滞后环节的柔直高频振荡控制方法及系统
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及一种电力系统稳定性控制技术领域,特别是关于一种基于滞后环节的柔直高频振荡控制方法及系统。
背景技术
近年来,柔性直流输电系统发展迅速。相对于交流输电系统,柔性直流输电系统在远距离、大容量输电系统中有较大优势。因此广泛应用在诸如海上风电传输、大直流电网构建等场景。随着柔直工程的逐渐增加,其中电力电子设备的广泛应用为电力系统带来了新的振荡问题。国内外学者提出此类振荡主要原因是由电力电子设备控制引起的振荡频率处的负电阻,所引起的谐波发散现象。目前主要的振荡控制方法主要集中在振荡频率附近的阻抗优化。通过添加附加阻尼装置来实现振荡的控制。但是此类方法对于系统参数要求较高,在系统结构复杂、参数较多的情况下,此类附加阻尼装置的设计更加困难。
发明内容
针对上述问题,本发明的目的是提供一种基于滞后环节的柔直高频振荡控制方法及系统,其可以降低滞后装置对柔直变流器其他频段阻抗特性的影响,有效抑制高频振荡。
为实现上述目的,本发明采取以下技术方案:一种基于滞后环节的柔直高频振荡控制方法,其包括:步骤1、获取柔直变流器的接入点三相电压信号和三相电流信号,进行abc/dq变换,得到dq坐标系下的电压信号和电流信号;步骤2、获取柔直变流器运行有功功率和无功功率,分别进行控制外环计算,得到dq坐标系下的参考电流信号;步骤3、将dq坐标系下的电压信号和电流信号、dq坐标系下的参考电流信号,进行控制内环计算,得到abc坐标系下的柔直变流器三相参考电压,实现对柔直高频振荡的控制。
进一步,所述步骤1中,abc/dq变换处理为:
式中,u
进一步,所述锁相环锁定的电网电压相角θ为:
θ=u
式中,G
进一步,所述锁相环传递函数G
式中,K
进一步,所述步骤2中,控制外环包括有功功率控制外环和无功功率控制外环,分别为:
式中,P
进一步,所述控制外环有功功率、无功功率PI控制器传递函数G
式中,K
进一步,所述步骤3中,控制内环计算包括以下步骤:
步骤3.1、将dq坐标系下的电压信号和电流信号、dq坐标系下的参考电流信号进行电流内环处理后,得到dq轴电压参考信号;
步骤3.2、通过滞后环节对dq轴电压参考信号进行相位补偿计算,获得补偿后的dq轴参考电压信号;
步骤3.3、补偿后的dq轴参考电压信号进行dq/abc逆变换,得到abc坐标系下的柔直变流器三相参考电压。
进一步,所述步骤3.1中,电流内环处理为:
其中,u
进一步,所述步骤3.2中,相位补偿计算为:
式中,G
一种基于滞后环节的柔直高频振荡控制系统,其包括:abc/dq变换模块、控制外环计算计算模块和控制内环计算模块;
所述abc/dq变换模块,获取柔直变流器的接入点三相电压信号和三相电流信号,进行abc/dq变换,得到dq坐标系下的电压信号和电流信号;
所述控制外环计算计算模块,获取柔直变流器运行有功功率和无功功率,分别进行控制外环计算,得到dq坐标系下的参考电流信号;
所述控制内环计算模块,将dq坐标系下的电压信号和电流信号、dq坐标系下的参考电流信号,进行控制内环计算,得到abc坐标系下的柔直变流器三相参考电压,实现对柔直高频振荡的控制。
本发明由于采取以上技术方案,其具有以下优点:本发明通过控制滞后补偿环节的中心频率及滞后补偿系统,实现了柔直变流器特定频段的相频特性的补偿,因此可以降低滞后装置对柔直变流器其他频段阻抗特性的影响。在不影响柔直变流器的控制动态特性的前提下,最大程度抑制高频振荡。
附图说明
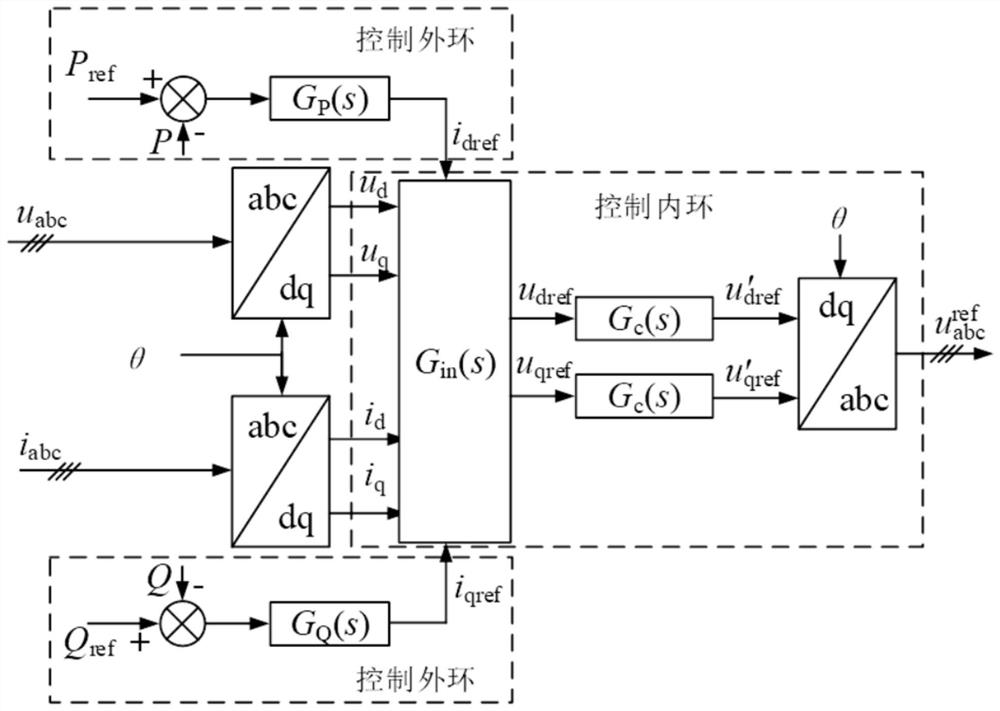
图1是本发明实施例中的方法整体流程示意图;
图2是本发明实施例中的电网相角θ锁相环结构示意图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例的附图,对本发明实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的第一实施方式中,如图1所示,提供一种基于滞后环节的柔直高频振荡控制方法,其包括以下步骤:
步骤1、获取柔直变流器的接入点三相电压信号和三相电流信号,进行abc/dq变换,得到dq坐标系下的电压信号和电流信号;
具体的,接入点三相电压信号为u
式中,u
其中,如图2所示,锁相环锁定的电网电压相角θ为:
θ=u
式中,G
锁相环传递函数G
式中,K
步骤2、获取柔直变流器运行有功功率和无功功率,分别进行控制外环计算,得到dq坐标系下的参考电流信号;
具体的,控制外环包括有功功率控制外环和无功功率控制外环,分别为:
式中,P
其中,G
式中,K
步骤3、将dq坐标系下的电压信号和电流信号、dq坐标系下的参考电流信号,进行控制内环计算,得到abc坐标系下的柔直变流器三相参考电压,实现对柔直高频振荡的控制;
具体的,控制内环计算包括以下步骤:
步骤3.1、将dq坐标系下的电压信号和电流信号、dq坐标系下的参考电流信号进行电流内环处理后,得到dq轴电压参考信号;
其中,控制内环的输入为控制外环生成的d轴电流参考信号i
其中,u
电流内环传递函数G
式中,K
步骤3.2、通过滞后环节对dq轴电压参考信号进行相位补偿计算,获得补偿后的dq轴参考电压信号;
其中,相位补偿计算为:
式中,G
步骤3.3、补偿后的dq轴参考电压信号进行dq/abc逆变换,得到abc坐标系下的柔直变流器三相参考电压;
其中,d轴电压补偿信号u′
式中,
在本发明的第二实施方式中,提供一种基于滞后环节的柔直高频振荡控制系统,其包括:abc/dq变换模块、控制外环计算计算模块和控制内环计算模块;
abc/dq变换模块,获取柔直变流器的接入点三相电压信号和三相电流信号,进行abc/dq变换,得到dq坐标系下的电压信号和电流信号;
控制外环计算计算模块,获取柔直变流器运行有功功率和无功功率,分别进行控制外环计算,得到dq坐标系下的参考电流信号;
控制内环计算模块,将dq坐标系下的电压信号和电流信号、dq坐标系下的参考电流信号,进行控制内环计算,得到abc坐标系下的柔直变流器三相参考电压,实现对柔直高频振荡的控制。
综上,本发明通过在柔直控制器中添加高频信号滞后环节,来实现柔直控制器的高频阻抗优化,避免了繁琐的高频信号设计过程。本发明中的高频振荡控制效果好,设计方法简便,在复杂柔直系统中的适用效果好。
本领域内的技术人员应明白,本申请的实施例可提供为方法、系统、或计算机程序产品。因此,本申请可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本申请可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、CD-ROM、光学存储器等)上实施的计算机程序产品的形式。
本申请是参照根据本申请实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
- 一种基于滞后环节的柔直高频振荡控制方法及系统
- 一种柔直高频振荡控制方法及系统