一种U型建筑布局下目标定位方法
文献发布时间:2023-06-19 11:42:32
技术领域
本发明属于复杂城市环境下的目标定位技术领域,特别涉及一种U型结构复杂城市环境下的目标定位技术。
背景技术
在传统的基于雷达的复杂环境探测之中,被遮蔽目标通常都会在雷达的视距范围之中,但是在很多的情况下例如U型等场景下,雷达的电磁波并不能通过直线路径传播到目标处,只能通过非直视的方式对目标进行探测。在非视距下由于电磁波传播到建筑物的外墙体与建筑物的墙角时分别会发生反射与衍射现象,经过反射与衍射的电磁波会进一步传播到目标处,因此随着建筑场景的复杂,电磁波可能会通过多次反射和衍射传播到目标处,会产生大量的多径信号。而在视距下电磁波发生透射时,电磁波在建筑内墙的反射以及与物体发生的反射也会产生大量的多径信号,由于接收雷达可以直接接收到目标反射产生的回波信号,因此在建筑墙内反射以及与物体发射反射而产生的多径信号在基于成像的目标定位与跟踪之中会产生假目标点从而造成虚警,严重妨碍对真实目标的定位与跟踪,所以需要对这些多径信号进行抑制。而在非视距的探测中,由于不存直接由目标反射产生的信号,因此只能通过利用通过多次反射与衍射的信号来进行目标的定位与成像。
国内外许多研究机构开展了复杂建筑布局下的目标探测定位。2020年,电子科技大学学者使用单输入多输出小孔径毫米波雷达解决非视距环境下的目标定位问题。其假定目标位于建筑物拐角后在先验建筑布局的情况下,通过利用电磁波的多径传播和多个通道之间回波的相位差,提出了一种基于相位比较的目标定位算法。最后,通过实测实验验证了所提出的算法的有效性(S.Guo,Q.Zhao,G.Cui,S.Li,L.Kong and X.Yang,Behind CornerTargets Location Using Small Aperture Millimeter Wave Radar in NLOS UrbanEnvironment[J],IEEE Journal of Selected Topics in Applied Earth Observationsand Remote Sensing,2020,pp.460-470.)。2020年,国防科技大学学者提出了一种基于网格匹配的非视距目标定位算法。该算法首先对来自L波段单输入单输出超-宽带雷达的实际数据建立多径传播模型。然后,根据多径传播模型计算每个网格的到达时间,并与最接近往返多径返回的TOA的网格进行匹配,最终对目标进行准确定位。仿真和实际数据实验结果均验证了所提出的定位算法的有效性(H.Du,C.Fan,Z.Chen,C.Cao,and X.Huang,NLOSTarget Localization with an L-Band UWB Radar via Grid Matching[J],Progress InElectromagnetics Research M,2020,pp.45-56.)。
发明内容
为解决上述技术问题,本发明提出一种U型墙建筑布局下目标定位方法,利用往返一次反射、往返二次反射和一次二次组合反射引入的镜像目标,可以计算出隐藏目标在U型结构中的位置。
本发明采用的技术方案为:一种U型墙建筑布局下目标定位方法,包括:首先通过一发两收的阵列天线雷达进行数据采集,通过MTI的方法进行预处理去除杂波等静态目标;然后通过检测方法进行峰值提取,对两个通道提取后的峰值进行椭圆交叉得到镜像点坐标;接着根据建筑布局将超出建筑布局的假目标点进行剔除;然后通过一次反射镜像目标点、二次反射镜像目标点、一次二次组合反射镜像目标点之间的几何关系,从这些坐标点中进行筛选,得到符合上述几何关系的坐标点;最后通过真实目标点与一次反射镜像点、二次反射镜像点之间的关系对真实目标点进行定位,并通过算数平均的方法提高定位结果的精度。
本发明的有益效果:本发明利用UWB雷达对隐藏在U型结构中的人体目标进行定位;根据电磁波的传播现象,分析了多径信号的五种主要传播路径;此外,本发明还推导了这种情况下镜像目标与真实目标之间的关系;利用往返一次反射、往返二次反射和一次二次组合反射引入的镜像目标,可以计算出隐藏目标在U型结构中的位置;电磁仿真结果表明了本发明方法定位的准确性和鲁棒性。
附图说明
图1为U型建筑场景建模图。
图2为通过XFDTD软件进行电磁波传播路径仿真示意图;
其中,图2(a)至图2(f)为不同时刻的电磁波传播;
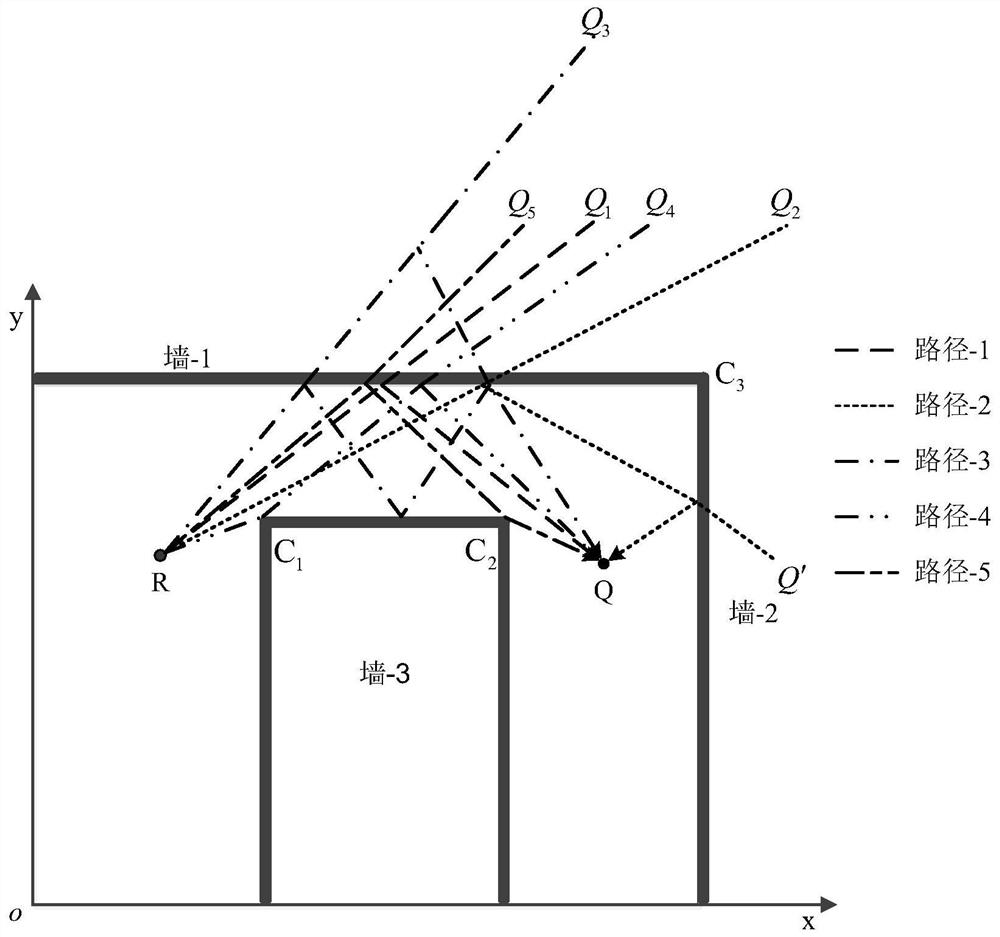
图3为据图2传播过程建立主要传播路径的模型。
图4为经椭圆交叉后得到的目标点分布图。
图5为对图4进行处理后定位结果。
图6为目标放在不同位置时的定位结果。
具体实施方式
为便于本领域技术人员理解本发明的技术内容,下面结合附图对本发明内容进一步阐释。
本发明的一种U型建筑布局下目标定位方法,处理流程如图1所示,包括以下步骤:
步骤1:预处理以及目标峰值提取
为了抑制雷达回波中存在的静态背景回波和天线耦合的影响,采用了运动目标识别(
Moving Target Indicator,MTI)技术,表示为:
y′
其中,y′
通过对预处理后两个雷达节点目标的距离像提取,可以得到两个雷达对应提取出峰值集合,每一条峰值对应的数值即为相对于雷达的距离,并将其对应路径从小到大排列到集合Q
Q
Q
其中L为提取出峰值的个数,r
步骤2:椭圆交叉法得镜像目标点位置以及真实目标定位
如图2所示为电磁波传播现象,图2(a)为雷达发射全向电磁波;图2(b)为发射的电磁波在C1墙角有一个衍射然后继续向上传播也有一部分电磁波没有发生衍射直接向上传播;图2(c)为在图2(b)基础上的这些电磁波经过墙1发生一次反射然后向下传播;图2(d)为在图2(c)基础上向下传播的电磁波有一部分在墙3上发生反射向上传播,一部分与墙角C2处发生衍射向下传播,还有一部分经过墙1的反射直接向下传播;图2(e)为墙角C2发生衍射的以及与墙1反射的波一直向下传播然后传播到目标处有一部分波打在了墙2上,圆圈3的波则是与墙1发生反射然后向下传播;图2(f)为圆圈3的波向下传播到了目标处圆圈4经过墙2反射最终到了目标出。
根据图2所示的电磁波传播现象,分析得到如图3所示的多径信号的五种主要传播路径;为了获得与多径信号的传播路径相对应的主镜目标,假设两个雷达的坐标分别为(x
假设两通道椭圆相交后得到的镜像目标位置为Z
Z
其中,v=1,2,3,...,V是镜像目标数。
根据已知建筑布局特性,假设图1中墙角C2、C3坐标分别为(x
其中,y
根据反射间的几何关系:
其中,x
根据上述关系,通过下面的选取过程,选择由一次反射、二次反射和一次二次组合反射引入的镜像目标。
首先,进行预筛选过程,在已知建筑布局的情况下,根据上述公式筛选可以将不符合建筑布局特性的假目标点剔除。然后,为了便于根据几何关系筛选镜像目标,将具有相同坐标的镜像目标分组到同一类别中。第一步是对所选的Z
Z′
G
其中,u=1,2,3,...,U,U为类别数。w=1,2,3,...,W,W是G
然后对所选的G
G
其中,G′
通过上述过程,将已经通过预筛选后的坐标首先分为U个大集合,然后将每一个大集合在分为多个小集合。
根据反射间的几何关系,可知如果满足以上几何关系那么集合G
根据几何关系将满足上述条件G
在经过上述过程之后得到了每个大集合中符合几何关系的小集合G″
其中(x
其中,N是实际目标的个数。
为了提高定位精度,将所有得到的真实目标点的横纵坐标求算数平均值。可以得到(x′
下面根据一个gprMax仿真例子给出本发明的具体实施方式。
对U型墙后的单个目标,其仿真场景如图1所示,通过gprMax软件进行仿真,图1中为具有三个墙壁的U形结构的场景。墙体均匀其相对介电常数为ε=20。利用半径为0.25m,ε=25的均质圆柱体模拟人体目标。采用一发两收的阵列天线,发射信号为Ricker子波,中心频率为1.9Ghz。雷达位置为(2m,5m)处,目标位置为(8m,5m)处
根据本发明的处理步骤:
步骤1:预处理以及目标峰值提取
首先通过MTI方法对两个雷达得到的距离像进行静态杂波抑制,之后通过峰值提取的方法得到每个距离像的全部初始峰值距离。
步骤2:椭圆交叉法得镜像目标点位置以及真实目标定位
首先通过椭圆交叉得到大量镜像点的坐标,并根据建筑布局特性剔除一些假点,剔除假点后得到的待选目标坐标如表1与图4所示:
表1剔除假点后得到的待选目标坐标
然后通过分类方法将相同坐标的目标归为一类并通过一次反射、二次反射、一次二次组合反射之间的几何关系进行筛选,得到的坐标如表2与图5所示:
表2根据反射间的几何关系进行筛选后得到的坐标
最后通过一次反射,二次反射与真实目标点之间的几何关系得到真实目标点的坐标,并通过算数平均值的方法,得到较为精确的坐标位置,结果如表3与图5所示:
表3精确的坐标位置
为了验证方法的鲁棒性,将目标依次放在如图6所示的6个位置进行定位,发现定位结果准确性较高,从而证明了算法的鲁棒性,本发明提供的适用于U型建筑结构下的目标定位方法,能够准确的对U型墙后目标进行定位,验证了本发明的准确性和有效性。
本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的权利要求范围之内。
- 一种U型建筑布局下目标定位方法
- 一种异构网络下快速精准的目标定位与跟踪方法