一种基于生物防治的虫卵球制备系统
文献发布时间:2023-06-19 11:50:46
技术领域
本发明属于机械设备领域,更具体的说涉及一种基于生物防治的虫卵球制备系统。
背景技术
在自然界,各种生物通过食物链和生活环境等相互联系,相互制约,形成复杂的生物群落和生态系统。任何生物或非生物因素的改变,均会导致不同生物种群数量的变化。基于上述生态特点以及人们对环境要求保护意识的提高,传统的农业化学防治已经被淘汰,进而选择对环境污染小、防治科学的神物防治。生物防治,是利用有益生物及其产物控制有害生物种群数量的一种防治技术。防治途径主要有保护有益生物、引进有益生物、人工繁殖与释放有益生物或有害生物的天敌或竞争生物等等。
其中人工繁殖与释放有益生物或有害生物的天敌或竞争生物是现有技术中最常用到的生物防治方法,本生物防治方法过程可控,目标的可达预期,且可以选择繁殖与释放生物品种,避免出现不可控因素。其中人工繁殖与释放有益生物或有害生物的天敌或竞争生物需要通过一些媒介或载体进行释放,往往是将需要释放的生物通过载体进行包裹,最后投放至环境中,一方面便于在投放中的可操作性,另一方面确保投放的生物能够有一个附着媒介,避免生物死亡等问题。
发明内容
本发明的目的在于提供一种基于生物防治的虫卵球制备系统,实现将用于生物防治的虫卵包裹在纸板中,制成球状,便于投放,也便于虫卵的存活,虫卵球制备系统一次制备虫卵球数量多,操作简单快速。
本发明技术方案一种基于生物防治的虫卵球制备系统,包括制球工位和冲球工位,所述制球工位上设置有用于放置下纸板和上纸板的移动模板以及用于压合上纸板和下纸板的压合模组,所述冲球工位上设置有用于在压合后的上纸板和下纸板上冲出虫卵球的冲球模组,所述移动模板上连接有实现移动模板在制球工位和冲球工位上往复运动的移动装置。
优选地,所述移动模板上均布设置有若干圆孔,所述圆孔直径与下纸板上的下半球直径相适应,所述移动模板厚度不小于下纸板上的下半球深度,所述移动模板上还均布设置有若干定位柱,所述定位柱与下纸板上定位孔相适应。
优选地,所述压合模组包括与所述移动模板平行的升降压板、安装在所述升降压板朝向所述移动模板侧的若干压头和与所述升降压板连接并带动升降压板升降的压合升降组件;
所述压合升降组件包括压合伺服电机、由所述压合伺服电机驱动旋转的升降皮带和与所述升降皮带固定的第一连接臂,所述第一连接臂另一端与所述升降压板固接;所述压合伺服电机带动所述升降皮带在竖直升降。
优选地,所述压头与所述升降压板可拆卸安装,所述压头为空心圆柱体,其内径与上纸板上半球外径相适应,所述空心圆柱体的侧壁上设置有贯穿空心圆柱体侧壁的排气孔。
优选地,所述制球工位上还设置有固定托板,所述移动模板置于所述固定托板上。
优选地,所述冲球模组包括与所述移动模板平行的冲球板、安装在所述冲球板朝向所述移动模板侧的若干冲头和与所述冲球板连接并带动所述冲球板升降的冲球升降组件;所述冲球升降组件包括与所述冲球板连接的第二连接臂和带动所述第二连接臂升降的丝杠组件。
优选地,所述冲头与所述冲球板可拆卸连接,所述冲头呈圆柱形且朝向移动模板端设置有半球形内凹孔,半球形内凹孔内直径大于上纸板上的上半球直径,半球形内凹孔外直径小于移动模板上圆孔内直径;所述冲头内设置有与所述半球形内凹孔连通的安装盲孔,所述安装盲孔侧壁上设置有贯穿安装盲孔侧壁的溢气孔。
优选地,所述移动装置包括移动导轨和带动所述移动模板沿所述移动导轨滑动的驱动机构;所述驱动机构包括驱动电机、与所述移动模板平行且与移动模板靠近冲球工位侧的底面边沿铰接的第一连杆以及与所述第一连杆平行且铰接的第二连杆,所述第二连杆远离所述第一连杆端穿过有竖直设置的曲柄,所述曲柄由所述驱动电机带动绕曲柄自身轴线旋转。
优选地,所述驱动电机呈水平状态设置,所述驱动电机通过锥齿轮组带动所述曲柄旋转,所述第一连杆长度不小于移动模板宽度,所述第二连杆长度不小于移动模板宽度的一半。
优选地,所述冲球工位下部设置有呈倾斜状态的导料滑道,所述导料滑道上口部与所述冲球工位上移动模板位置相适应,导料滑道下口部由系统侧面延伸出;
所述制球工位和冲球工位相离的一侧均分别设置有硬性限位组件,所述硬性限位组件包括限位杆和设置在限位杆外端部的限位橡胶垫;所述制球工位远离所述冲球工位侧还设置有光电复位开关;
所述制备系统还包括有机架和屏蔽门,所述制球工位和冲球工位设置在机架内部,所述屏蔽门侧面设置有机械限位开关,所述机械限位开关连接有PLC控制器,所述PLC控制器控制压合模组、冲球模组和移动装置工作状态。
本发明技术方案的一种基于生物防治的虫卵球制备系统的有益效果是:
1、首先通过压合模组将下纸板和上纸板压合,然后通过冲球模组在压合的上纸板和下纸板上一次性冲出多个虫卵球,生产效果高,且压合模组有效的确保了虫卵球的球体结构,降低虫卵球出现开裂的问题。
2、移动模板的设计依照下纸板和上纸板结构设计,便于下纸板与上纸板重合并压合在一起,支撑虫卵球。
3、压合模组能够调整压力力度,确保虫卵球成球,同时避免压合力度过大,影响虫卵球的完整性。
4、移动装置结构紧凑,有效降低本系统设备的体积,降低成本。
5、导料滑道的设计,使得虫卵球在冲下后能够与导料滑道内壁发生一定的碰撞,便于剔除一些在压合中没有完全粘合的虫卵球。
附图说明
图1为本发明技术方案中的上纸板和下纸板而结构示意图,
图2为本发明技术方案的一种基于生物防治的虫卵球制备系统的立体图,
图3为图2的右视图,
图4为图3中压合模组示意图,
图5为图2的主视图,
图6为图2的俯视图,
图7为移动模板在冲球工位上状态示意图,
图8为移动装置结构示意图,
图9为冲头结构示意图。
具体实施方式
为便于本领域技术人员理解本发明技术方案,现结合说明书附图对本发明技术方案做进一步的说明。
如图1所示,图1中有制备虫卵球用的下纸板20和上纸板30,在下纸板20上设置有向下凹陷的下半球201,上纸板30上设置有向上凸出的上半球301,在上纸板30和下纸板20上均分别设置有用于定位和限位的限位孔202、203。
如图1所示,图1中还体现了用于放置下纸板20的移动模板10,在移动模板10上设置有与下纸板20上的下半球201相适应的圆孔101和与限位孔202、203相适应的定位柱102。
基于上述下纸板20、上纸板30和移动模板10结构,在制备虫卵球时,将虫卵放置在下纸板20上的下半球201内,然后在下纸板20朝向上纸板30的表面上刷胶,最后将上纸板30放置在下纸板20上,通过虫卵球制备系统中的压合模组将上纸板30和下纸板20进行压合,然后通过虫卵球制备系统中冲球模组将进行冲压,制成虫卵球。最后,将制备的虫卵球定时定量的投放至指定环境中,进行生物防治。
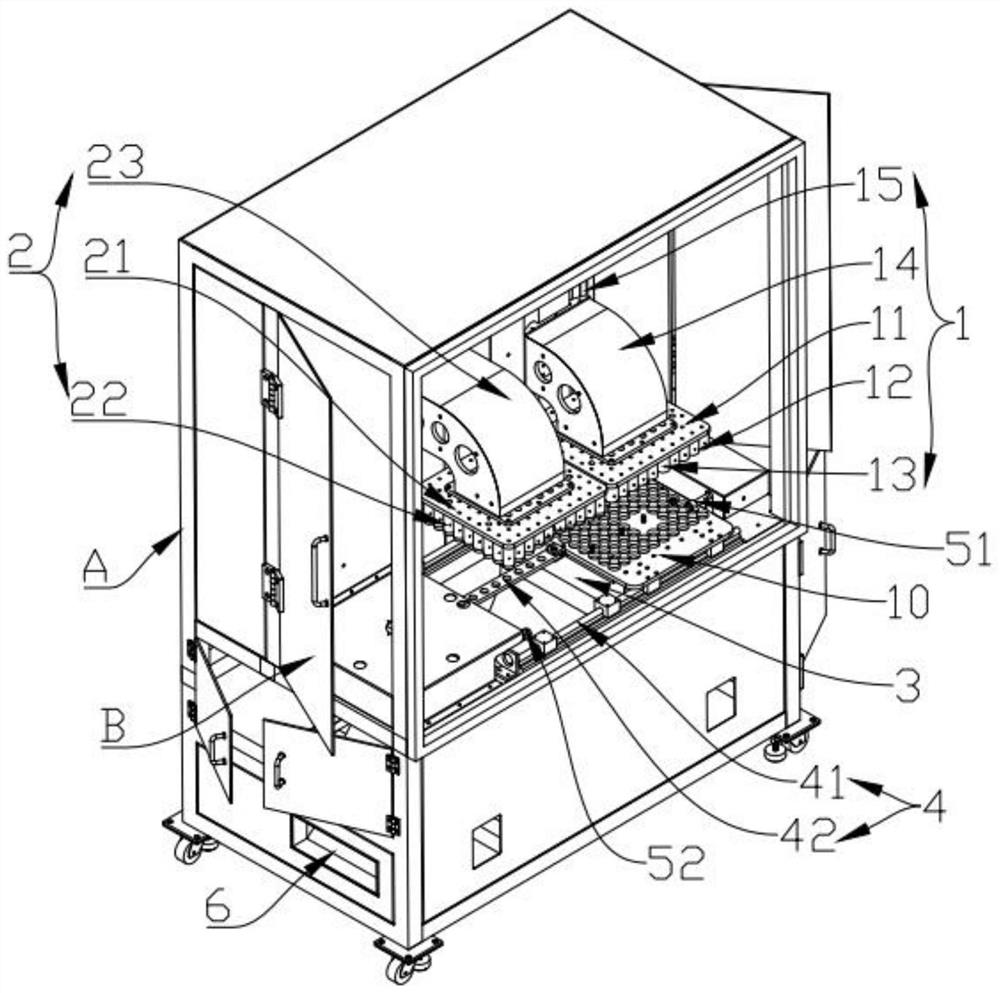
如图2,本发明技术方案一种基于生物防治的虫卵球制备系统,包括机架A、设置在机架A上两侧和后部的防护门B和设置在机架A前部的屏蔽门,图2中屏蔽门未绘出,其设置在移动导轨41的前部。制球工位和冲球工位设置在机架内部。防护门可打开,便于对机架内故障部件进行维修,屏蔽门上连接有机械限位开关,只有当屏蔽门完全关闭后,触发机械限位开关,机械限位开关与系统的PLC控制器连接,PLC控制器启动控制各个模组等工作。当在制球过程中,屏蔽门被开启或误开,机械限位开关向PLC控制器输入信号终端,PLC控制器控制各个模组等停止工作,复位,避免继续加工出现安全事故或错误的加工问题。
如图2所示,本发明技术方案一种基于生物防治的虫卵球制备系统,包括制球工位和冲球工位,制球工位上设置有用于放置下纸板20和上纸板30的移动模板10以及用于压合上纸板30和下纸板20的压合模组1。冲球工位上设置有用于在压合后的上纸板30和下纸板20上冲出虫卵球的冲球模组2。移动模板10上连接有实现移动模板10在制球工位和冲球工位上往复运动的移动装置4。
基于上述技术方案,在系统停机状态下,此时移动模板10处于初始位置,即位于制球工位上,也即位于压合模组1下部。通过人工手动操作或相适配的机械手自动操作,首先将下纸板20放置在移动模板10上,然后向下纸板20的下半球201内放入虫卵,再后在下纸板20向上的表面上刷胶,最后,将上纸板30对应放置在下纸板20的上表面上,使得上纸板30上的上半球301与下纸板20上的下半球201对应。上述步骤完成后,关闭屏蔽门,启动系统,压合模组1启动,向下压合,将下纸板20和上纸板30上向贴的平面压合。压合完成后,压合模组1复位,然后移动装置4启动将移动模板10及其上的上纸板30和下纸板20一起移动至冲球工位上,即移动至冲球模组2下部位置。然后冲球模组2启动向下冲压,将压合的下纸板20和上纸板30上的下半球201和上半球301冲出,制备一个个的虫卵球。虫卵球由移动模板10上的圆孔101落下被收集即可。最后,冲球模组2向上复位,移动装置4再次启动,带动移动模板10向初始位置复位。最后可打开屏蔽门,将剩余在移动模板4上的纸板残片取下,放上新的下纸板20继续下一次的制球过程。
基于上述技术方案和工作过程,通过压合模组1将下纸板20和上纸板30压合,然后通过冲球模组2在压合的上纸板30和下纸板20上一次性冲出多个虫卵球,生产效果高,且压合模组2有效的确保了虫卵球的球体结构,降低虫卵球出现开裂的问题。根据制备的上纸板30和下纸板20的形状和大小,可以实现一次性制备多种不同的虫卵球,生产效率高。
如图1所示,移动模板10上均布设置有若干圆孔101,圆孔101直径与下纸板20上的下半球201直径相适应,移动模板10厚度不小于下纸板20上的下半球201深度。移动模板10上还均布设置有若干定位柱102,定位柱102与下纸板20上定位孔202相适应。为进一步的确保下纸板20和上纸板30的配合以及在制球过程中虫卵球的成型和收集,上纸板30上的上半球301直径应不大于移动模板10上圆孔101直径,上纸板30上定位孔302与定位柱102相适应。这样就能够确保将下纸板20和上纸板30均与移动模板10固定,在压合过程中不会出现偏移等问题,且能够确保下纸板20和上纸板30上的下半球201和上半球301对应。
如图2和图5所示,压合模组1包括与移动模板10平行的升降压板11、安装在升降压板11朝向移动模板10侧的若干压头12和与升降压板11连接并带动升降压板11升降的压合升降组件。如图3和图4所示,压合升降组件包括压合伺服电机16、由压合伺服电机16驱动旋转的升降皮带15和与升降皮带15固定的第一连接臂14。第一连接臂14另一端与升降压板11固接;压合伺服电机16带动升降皮带15在竖直升降。压合伺服电机16的电机轴上固定同步轮18,升降皮带15采用同步带,压合伺服电机16工作,通过同步轮带动同步带(升降皮带15)运动,升降皮带15上的第一连接臂14带动升降压板11同步升降。根据不同型号的上纸板和下纸板,调节压合伺服电机16带动同步带运动行程,即实现升降压板11相对移动模板10的距离,即实现压合模组1对上纸板和下纸板上压合力大小的调整。本技术方案的设置,一方面确保上纸板和下纸板的压合,同时也避免压合力过大造成纸板的损坏或压合力不足,上纸板和下纸板不能压合的问题,确保虫卵球的完整性,避免虫卵球在后续的冲球、收集、周转和投放中出现变形、开裂等问题。
如图2所示,压头13与升降压板11可拆卸安装,可根据不同型号的上纸板30更换压头,提高设备适应性。压头13为空心圆柱体,其内径与上纸板30上的上半球301外径相适应,空心圆柱体的侧壁上设置有贯穿空心圆柱体侧壁的排气孔13。压头13压合中,上半球30挤压压头13的空心圆柱体内部气体,此时空气即可由排气孔13排出,减小压合模组1向下的阻力,确保运行平稳,且避免在压合中或压合模组1上升中,影响到上纸板和下纸板的静止状态。
如图2和图7所示,制球工位上还设置有固定托板17,移动模板10置于固定托板17上。因在压合模组1向下压合时,移动模板10需要承受较大的压力,设置固定托板17确保移动模板10的稳定,避免移动模板10变形等。
如图2和图5所示,冲球模组2包括与移动模板10平行的冲球板21、安装在冲球板21朝向移动模板10侧的若干冲头22和与冲球板21连接并带动冲球板21升降的冲球升降组件。冲球升降组件包括与冲球板21连接的第二连接臂23和带动第二连接臂23升降的丝杠组件。丝杠组件包括竖直设的丝杠25和导杆,第二连接臂23远离冲球板21端套设在丝杠上,丝杠25顶端连接有冲球伺服电机24,冲球伺服电机24工作带动丝杠25旋转,带动第二连接臂23升降,在第二连接臂23向下运动时,实现对移动模板10上的上纸板和下纸板进行冲球。本技术方案中,丝杠组件的设置,一方面运动精准,运行平稳,另一方面整体丝杠组件结构紧凑,便于安装和维修,故障率低。
如图2和图9所示,冲头22与冲球板21可拆卸连接,冲头22呈圆柱形且朝向移动模板10端设置有半球形内凹孔222。半球形内凹孔222内直径大于上纸板30上的上半球301直径,半球形内凹孔222外直径小于移动模板10上圆孔101内直径。冲头22内设置有与半球形内凹孔222连通的安装盲孔223,安装盲孔223侧壁上设置有贯穿安装盲孔223侧壁的溢气孔224。在冲球中,上纸板30上的上半球301进入半球形内凹孔222内,挤压半球形内凹孔222内空气并由溢气孔224排出,确保了冲球模组2运行平稳,且在冲球模组2上升复位中,空气在由溢气孔224进入安装盲孔223内,避免虫卵球被吸附在冲头22上,确保虫卵球的顺利冲压和落下。
如图2、图6、图7和图8所示,移动装置4包括移动导轨41和带动移动模板10沿移动导轨41滑动的驱动机构。驱动机构包括驱动电机45、与移动模板10平行且与移动模板10靠近冲球工位侧的底面边沿铰接的第一连杆42以及与第一连杆42平行且铰接的第二连杆43。第二连杆43远离第一连杆42端穿过有竖直设置的曲柄44,曲柄44由驱动电机45带动绕曲柄44自身轴线旋转。曲柄44远离第二连杆43端固定套设有锥齿轮,锥齿轮与套接在驱动电机45的电机中上的锥齿轮啮合,两锥齿轮的啮合,改变了驱动电机45输出的运动方向,使得曲柄44绕自身轴线旋转,通过第一连杆42和第二连杆43带动移动模板10进行移动。本技术方案中,采用曲柄连接机构实现移动模板10的移动,相较于气缸推动、电机丝杠等的带动,对环境要求低,涉及的结构部件少,整体结构简单,减低了系统整体设备的体积。
如图6和图7所示,驱动电机45呈水平状态设置,驱动电机45通过锥齿轮组带动曲柄44旋转,第一连杆长42度不小于移动模板10宽度,第二连杆43长度不小于移动模板10宽度的一半。如图6和图7所示为本移动装置4工作过程示意图,移动装置4带动移动模板10在制球工位和冲球工位之间移动,第一连杆长42和第二连杆43长度的设计,需要确保移动模板10在制球工位和冲球工位之间移动往复移动。
如图2和图8所示,冲球工位2下部设置有呈倾斜状态的导料滑道6。如图5所示,导料滑道6的上口部61与冲球工位2上移动模板10位置相适应,导料滑道6的下口部62由系统侧面延伸出。导料滑道6的设计,使得虫卵球在冲下后能够与导料滑道6内壁发生一定的碰撞,在碰撞中,一些粘合度不是很好的虫卵球会裂开为两半,这样导料滑道6,便于剔除一些在压合中没有完全粘合的虫卵球。
移动模板10在制球工位和冲球工位之间移动往复移动过程中,因曲柄连杆机构的移动装置4带动移动模板10运动快速,避免移动模板10与系统发生碰撞,在制球工位和冲球工位两侧均分别设置限位、缓冲结构,避免移动模板10与系统发生刚性碰撞,延长移动模板10的使用寿命,降低系统的故障率。如图2所示,制球工位和冲球工位相离的一侧均分别设置有硬性限位组件51、52,硬性限位组件51、52包括限位杆和设置在限位杆外端部的限位橡胶垫。在移动模板10往复移动中,PLC控制器通过控制移动装置4的驱动电机45以及通过合理设置第一连杆长42和第二连杆43长度,能够有效的确保移动模板10与机架不发生碰撞,若在部分结构发生故障或运行精度不足的情况下,移动模板10超出了指定范围,这样硬性限位组件51、52就实现了作用,限位橡胶垫实现对移动模板10进行缓冲,避免移动模板10与系统发生刚性的碰撞。制球工位远离冲球工位侧还设置有光电复位开关53,如图6所示;光电复位开关53设置在初始位置由侧,实现对移动模板10的初始位置进行确定,在光电复位开关53未检测到移动模板10处于初始位置时,系统的PLC控制器控制各个模组不启动、不工作,避免出现操作安全事故或错误制球的问题。
本发明技术方案在上面结合附图对发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性改进,或未经改进将发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
- 一种基于生物防治的虫卵球制备系统
- 一种基于生物防治的虫卵投放装置