一种基于bang-bang-滑模PI控制器
文献发布时间:2023-06-19 12:00:51
技术领域
本发明涉及电机控制领域,具体是一种基于bang-bang-滑模PI控制器。
背景技术
本发明之前已有不少关于永磁同步电机转速环的设计,如模糊滑模控转速制器,专家转速环控制器设计,分数阶转速控制器,神经网络转速控制器等。近年来,新能源这一概念被提起来,意外带火了电机的发展,电机里面分为直流电机和交流电机,在交流电机里面,永磁同步电机由其自身具有较高的密度和可靠性,在工业使用中已经形成不可替代的重要作用。
永磁同步电机滑模转速环控制结构,采用积分滑模面来克服系统误差,为保证转速环节运动效果和减少到达滑模面时间,滑模结构采用指数趋近率。虽然滑模控制系统优点较为突出。但永磁同步电机具有一定的非线性,时变性和强耦性。同时系统存在较强的不确定性和非线性。以至于在永磁同步电机控制过程中,单靠滑模控制不足以使永磁同步电机转速得到较理想效果。此时引入bang-bang控制以达改善转速效果,使其在工业应用中性能更加稳定,使生产作业产出产品更加优良。
本发明提出的一种基于bang-bang-滑模PI控制器,从民用角度出发,新能源汽车已经被国家大力提倡,其中动力输出的转换就是通过电机来完成。在汽车启动初始转态可以通过该控制器,达到车辆稳定启动,避免在初始阶段,由于转速波动,使汽车零配件使用寿命减短和保证汽车在运行过程中的安全性。
发明内容
本发明的目的是提供一种基于bang-bang-滑模PI控制器;该控制器可以根据转速误差判别,选择在误差过大时采用bang-bang控制,在误差减小到一定范围时采用滑模控制。
本发明实现发明目的采用如下技术方案:
一种基于bang-bang-滑模PI控制器,系统模型包括5个模块:bang-bang-滑模PI控制模块、SVPWM空间矢量模块、Clark坐标变换模块、Park坐标变换模块、Park逆变换模块,以此为基础采用id=0控制的电机数学模型,在运行过程中,当输入转速和输出转速相对误差较小时,误差判别判断器选择滑模PI控制器,最终,使得不仅初始阶段转速环抖动大幅度减小,而且在运行过程中输出转速始终保持稳定状态。
作为优选,本发明提供的一种基于bang-bang-滑模PI控制器,所述bang-bang-滑模PI控制模块,当输入转速与输出相对误差过大时,采用bang-bang控制器,bang-bang控制过程,当相对误差过大时,通过设定bang-bang控制使得相对误差保持在[n
作为优选,本发明提供的一种基于bang-bang-滑模PI控制器,所述SVPWM空间矢量模块,用来将三相逆变器输出电压经过坐标变换后进行空间矢量变换,将PWM波输入逆变器上,三相逆变器模块,用来将SVPWM坐标变换输出信号后,通过晶闸管,二极管,控制信号输出方式,再输入到永磁同步电机上径向控制。
作为优选,本发明提供的一种基于bang-bang-滑模PI控制器,所述显示Clark坐标变换模块用来将永磁同步电机输出的三相电流,转换成两相静态坐标电流。利用空间上绕组互差90度的绕组,再通过时间上相隔90度的交流电,产生作用效果和三相电产生一样的作用效果。
作为优选,本发明提供的一种基于bang-bang-滑模PI控制器,所述Park坐标变换模块用来将静态坐标系,两相电流,转化为动态坐标系下两相电流。根据两个相互垂直的绕组,在两绕组中分别接通直流电,用相同的角速度进行旋转,用这两相磁场来合成一个旋转的磁场。再使得两相绕组轴线和三相绕组方向相同时,此时可以用两相直流电来代替三相电。
作为优选,本发明提供的一种基于bang-bang-滑模PI控制器,所述的Park逆变换模块用来将动态坐标系下两相电流,转换为输出为静态坐标系小两相电流。在Park变换基础上,将Park变化过程进行反推的过程。
作为优选,本发明提供的一种基于bang-bang-滑模PI控制器,所述的转速控制系统,其转速稳定精确度大幅度提高,鲁棒性能较好,其结构简单。所达到的便民效果在于:在永磁同步电机转速环节转上该改进后,转速不能在初始阶段,还是在变负载情况下都能保证稳定状态。
有益效果:
本发明与现有技术相比,其有益效果体现在:永磁同步电机滑模转速环控制结构,采用积分滑模面来克服系统误差,为保证转速环节运动效果和减少到达滑模面时间,滑模结构采用指数趋近率。同时引入bang-bang控制以达改善转速效果,bang-bang控制可以使得在转速抖动较大时,快速恢复到稳定状态,在误差减小到一定程度时,切换到滑模控制,使永磁同步电机能够稳定运行。
附图说明
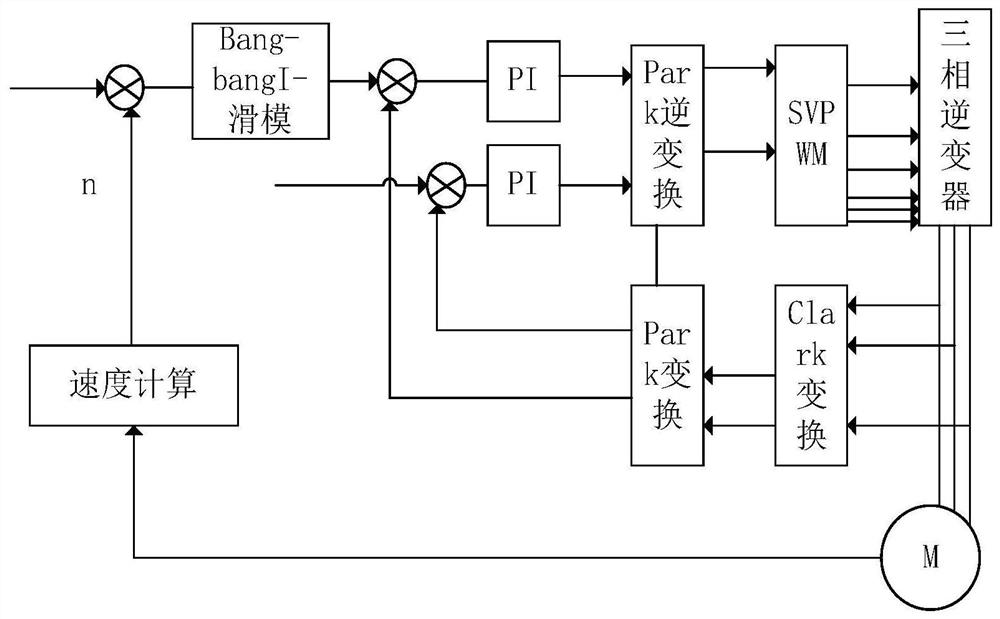
图1为本发明的系统结构示意图
图2是本发明的bang-bang-滑模控制器示意图
图3是本发明的仿真数据示意图
具体实施方式
以下通过附图对本发明作进一步阐述,以使本发明的优点和特性能更易于被本领域技术人员理解。
如图1所示,为了能更清楚的看清基于改进前和改进后的效果,选一组参数,在MATLAB实现。要注意的是选取的电机是特定的表贴式永磁同步电机,由图1可知系统模型包括:SVPWM空间矢量模块,用来将三相逆变器输出电压经过坐标变换后进行空间矢量变换,将PWM波输入逆变器上。三相逆变器模块,用来将SVPWM坐标变换输出信号后,通过晶闸管,二极管,控制信号输出方式,再输入到永磁同步电机上径向控制。Clark坐标变换模块,用来将永磁同步电机输出的三相电流,转换成两相静态坐标电流。Park坐标变换模块,用来将静态坐标系,两相电流,转化为动态坐标系下两相电流。Park逆变换模块,用来将动态坐标系下两相电流,转换为输出为静态坐标系小两相电流。
如图2所示,误差判别判断器选择滑模PI控制器。转速环滑模控制采用指数趋近律方法构建滑模速度控制器,其速度控制器规律为
如图3所示,为单独使用滑模控制器和在结合bang-bang控制器时,转速的对比图。在使用bang-bang和滑模PI控制的条件下,电机不但在初始阶段抖动明显减弱,在0.2s时,电机转速1000n/min提升到1200n/min的过程中电机转速依然能保持稳定。在0.3s加负载情况下,电机依然能保持较稳定状态。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种基于bang-bang-滑模PI控制器
- 一种基于预测函数控制与模糊控制的PI控制器参数自整定方法