一种基于一维距离像特征的杂波图检测与更新方法
文献发布时间:2023-06-19 12:13:22
技术领域
本发明涉及雷达信号处理领域,具体涉及一种基于一维距离像特征的杂波图检测与更新方法。
背景技术
通常而言,地物杂波主要来自楼房、树木等回波能量较强的目标;为实现目标检测,可以建立杂波图,雷达扫描场地中出现的目标。机械扫描雷达上报的目标角度与转台上报的角度有关,单个角度上报的回波信号,为各个距离单元下的回波,即一维距离像信息。由于雷达扫描场地可能发生变化,因此需要实时更新杂波图,避免此后的检测过程上报虚警目标。若扫描场地临时出现某些大目标时,且正在进行杂波图扫描,扫描结果参与杂波图更新,会严重影响目标检测效果。
发明内容
针对现有技术中的上述不足,本发明提供的一种基于一维距离像特征的杂波图检测与更新方法解决了现有方法将扫描结果直接参与杂波图更新严重影响检测效果的问题。
为了达到上述发明目的,本发明采用的技术方案为:
提供一种基于一维距离像特征的杂波图检测与更新方法,其包括以下步骤:
S1、建立初始杂波图,获取初始杂波图在各个角度维下的一维距离像信息熵和中心矩特征;
S2、进行雷达扫描,并根据当前扫描帧对应的机械转台角度在初始杂波图中取出对应角度下的数据作为当前扫描帧的杂波底参考数据;
S3、将当前扫描帧扫描数据与与其对应的杂波底参考数据进行比较,获取超过检测门限的回波点,并将其作为检测上报的目标点;
S4、获取当前扫描帧数据的一维距离像信息熵和中心矩特征;
S5、完成一次扫描,将待参与杂波图更新的数据存储于临时杂波图中,并记录各角度下的一维距离像信息熵和中心矩特征;
S6、判断各扫描帧数据的一维距离像信息熵与初始杂波图在对应角度维下的信息熵差值,以及各扫描帧数据的杂波图中心矩与初始杂波图在对应角度维下的中心矩的差值是否均在设定范围内,若是则进入步骤S7;否则不进行杂波图更新;
S7、将临时杂波图更新至初始杂波图中,完成基于一维距离像特征的杂波图更新。
进一步地,步骤S1中建立初始杂波图的具体方法包括以下子步骤:
S1-1、转动机械转台,并使雷达按设定的信号处理周期上报单帧扫描数据;其中单帧扫描数据为某角度下各个距离单元下的目标幅度回波,即一维距离像数据,大小为N
S1-2、确定存储杂波图的角度单元精度Δθ,雷达杂波图扫描范围Θ,根据公式
S1-3、重复步骤S1-1和步骤S1-2共N
S1-4、对N
进一步地,步骤S1中获取各角度维下的一维距离像信息熵的具体方法为:
根据公式:
获取任一角度维下的一维距离像信息熵E
进一步地,步骤S1中获取各角度维下的中心矩的具体方法为:
根据公式:
获取任一角度维下的中心矩p
进一步地,雷达回波信号幅值中心矩的阶数n的取值为2,即二阶中心矩。
进一步地,步骤S7的具体方法为:
根据公式:
G
对初始杂波图G
本发明的有益效果为:本方法可以自动分辨扫描场地中是否出现异常大目标,若判断当前场地出现异常大目标,则将该大目标进行上报并在该扫描周期中不进行杂波图更新,进而不会影响后续异物检测的结果,提高检测效果。
附图说明
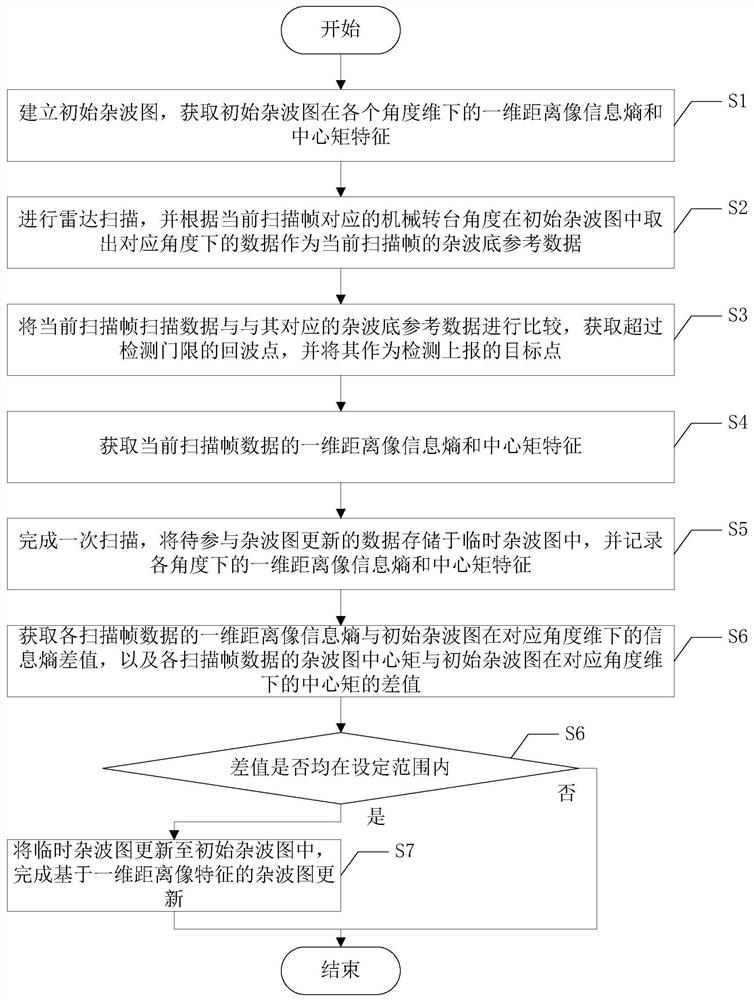
图1为本发明的流程示意图;
图2为实施例中第一个飞机起飞过程杂波图检测结果;
图3为第一个飞机对应的距离维信息熵特征;
图4为第一个飞机对应的距离维二阶中心矩特征;
图5为第二个飞机起飞过程杂波图检测结果;
图6为第二个飞机对应的距离维信息熵特征;
图7为第二个飞机对应的距离维二阶中心矩特征。
具体实施方式
下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
如图1所示,该基于一维距离像特征的杂波图检测与更新方法包括以下步骤:
S1、建立初始杂波图,获取初始杂波图在各个角度维下的一维距离像信息熵和中心矩特征;
S2、进行雷达扫描,并根据当前扫描帧对应的机械转台角度在初始杂波图中取出对应角度下的数据作为当前扫描帧的杂波底参考数据;
S3、将当前扫描帧扫描数据与与其对应的杂波底参考数据进行比较,获取超过检测门限的回波点,并将其作为检测上报的目标点;
S4、获取当前扫描帧数据的一维距离像信息熵和中心矩特征;
S5、完成一次扫描,将待参与杂波图更新的数据存储于临时杂波图中,并记录各角度下的一维距离像信息熵和中心矩特征;
S6、判断各扫描帧数据的一维距离像信息熵与初始杂波图在对应角度维下的信息熵差值,以及各扫描帧数据的杂波图中心矩与初始杂波图在对应角度维下的中心矩的差值是否均在设定范围内,若是则进入步骤S7;否则不进行杂波图更新;
S7、将临时杂波图更新至初始杂波图中,完成基于一维距离像特征的杂波图更新。
步骤S1中建立初始杂波图的具体方法包括以下子步骤:
S1-1、转动机械转台,并使雷达按设定的信号处理周期上报单帧扫描数据;其中单帧扫描数据为某角度下各个距离单元下的目标幅度回波,即一维距离像数据,大小为N
S1-2、确定存储杂波图的角度单元精度Δθ,雷达杂波图扫描范围Θ,根据公式
S1-3、重复步骤S1-1和步骤S1-2共N
S1-4、对N
步骤S1中获取各角度维下的一维距离像信息熵的具体方法为:根据公式:
获取任一角度维下的一维距离像信息熵E
步骤S1中获取各角度维下的中心矩的具体方法为:根据公式:
获取任一角度维下的中心矩p
步骤S7的具体方法为:根据公式:
G
对初始杂波图G
FOD雷达主要用于机场跑道的异物检测。机场跑道中的地物杂波主要来自边灯、飞机、巡逻车等回波能量较强的目标,为实现跑道异物检测,可以建立杂波图,检测跑道中出现的异物。在跑道出现飞机、巡逻车等大目标时,对应角度的一维距离像回波会有较大的起伏,计算对应角度的距离像特征,若与现有杂波图对比,距离像特征发生明显变化,则当前扫描结果不参与杂波图更新,避免影响后续目标检测效果。因此在本发明的一个实施例中,基于某机场的两组实测飞机目标回波数据,原始杂波图为干净的(无飞机、车辆或异物等目标)机场跑道扫描结果,分别计算原始杂波图和两组飞机目标回波数据的距离维信息熵和距离维二阶中心矩特征,对比距离维信息熵和距离维二阶中心矩特征的变化情况。FOD雷达的部分指标如下:
a)波段92.5GHz;
b)最大探测距离70m;
c)雷达扫描速度12m/s;
d)检测上报门限13dB。
对于第一组飞机,其起飞过程杂波图检测结果如图2所示,其距离维信息熵特征如图3所示,其距离维二阶中心矩特征如图4所示。从图2的检测结果可以看出,起飞的飞机目标主要在60°~160°范围内。距离维信息熵和距离维二阶中心矩特征主要与扫描场地的环境和目标有关。由图3和图4的结果可以看出(不带圆圈的曲线为杂波图数据对应的特征,带圆圈的曲线为飞机起飞数据对应的特征),在0度附近,跑道上存在固定强目标(边灯),因此对应的信息熵较小,而二阶中心矩较大,但两维特征的变化较小;60°~160°范围内,带圆圈的曲线和不带圆圈的曲线的差值明显变大,证明回波变化剧烈时,提取的两种特征可以明显地显现回波特性的变化。进而可以通过设定阈值来判断当前数据是否可以参与杂波图更新。
对于第二组飞机,其起飞过程杂波图检测结果如图5所示,其距离维信息熵特征如图6所示,其距离维二阶中心矩特征如图7所示。从图5的检测结果可以看出,起飞的飞机目标主要在80°~160°范围内。由图6和图7的结果可以看出(不带圆圈的曲线为杂波图数据对应的特征,带圆圈的曲线为飞机起飞数据对应的特征),在0度附近,跑道上存在固定强目标(边灯),对应的信息熵较小,二阶中心矩较大,但两维特征的变化较小;80°~160°范围内,带圆圈的曲线和不带圆圈的曲线的差值明显变大,证明回波变化剧烈时,提取的两种特征可以明显地显现回波特性的变化。进而可以通过设定阈值来判断当前数据是否可以参与杂波图更新。
综上所述,本方法可以自动分辨扫描场地中是否出现异常大目标,若判断当前场地出现异常大目标,则将该大目标进行上报并在该扫描周期中不进行杂波图更新,进而不会影响后续异物检测的结果,提高检测效果。
- 一种基于一维距离像特征的杂波图检测与更新方法
- 一种基于基元杂波图与图层的杂波图检测与更新方法