一种大型圆环件加工设备
文献发布时间:2023-06-19 12:21:13
技术领域
本发明涉及加工设备领域,特别涉及一种大型圆环件加工设备。
背景技术
随着现代化工业的不断发展,对复杂工件的需求也逐渐增多,针对大型圆环件的切割作业,采用较多的是手工火焰切割。它在机械加工中的地位不可或缺,尤其在切割较大厚度板材、各种类型的切割坡口生产中具有一定优势。虽然手工火焰切割的应用较为广泛,但切割质量完全取决于作业者的操作技术,干扰因素较多。不仅劳动强度大,效率低,且切割后的加工尺寸、精度及切口表面质量难以保证。
为解决手工火焰切割的弊端,现有技术主要有两种方式,一种是采用六轴关节臂切割机器人,另一种是磁力爬行切割机器人。采用第一种技术时,切割的精度、切口表面质量受悬臂安装精度、悬臂刚性的影响,通常只适用于切割直径在六米内的小型圆环件,适用性较差;第二种技术虽然相较于第一种技术实用的场合更多,但是磁力爬行切割机器人需要足够的爬行空间,而大于六米的大型圆环件宽度较窄,很难满足其工作要求,另外,磁力爬行切割机器人仅能进行直线切割和标准圆切割,不能对U型缺口等异型的缺口进行切割。
发明内容
本发明提供了一种大型圆环件加工设备,其目的是为了解决现有的切割设备不能进行异型孔切割、适用范围窄的问题。
为了达到上述目的,本发明的实施例提供了一种大型圆环件加工设备,包括:
支架,包括相互平行的第一横梁和第二横梁,所述第二横梁的两端中心对称设置有腰型槽;
定位机构,包括定位横梁,两个所述定位横梁的一端活动连接于腰型槽内,另一端滑动设置有锁紧结构,所述定位横梁的中部转动连接于第一横梁;
对心调整机构,包括调整梁,所述调整梁上设置有对准仪,所述调整梁设置在两个定位横梁之间且固定于第一横梁的中部,所述调整梁设置有连杆,所述连杆拉动两个所述定位横梁相互靠近;
支撑柱,两个所述支撑柱设置在第一横梁的下端,所述支撑柱朝向锁紧结构一侧设置有第一从动轮,所述支撑柱远离锁紧结构一侧设置有可移动的加工机构;
主动轮,设置在定位横梁上,且位于锁紧结构与支撑柱之间用以与圆环件的端面接触。
优选的,所述连杆包括滑块和两个与滑块转动连接的连接杆,所述连接杆与所述定位横梁转动连接,所述滑块滑动设置于调整梁。
优选的,所述连杆还设置有第一主动丝杠,所述第一主动丝杠驱动滑块在调整梁上滑动,所述第一主动丝杠由第一电机驱动。
优选的,所述锁紧结构包括第二主动丝杠,所述第二主动丝杠上设置有锁紧板,所述第二丝杠推动锁紧板沿定位横梁长度方向移动,所述锁紧板上设置有与圆环件内壁抵接的第二从动轮,所述锁紧板与第二从动轮之间设置有压力传感器。
优选的,所述第二主动丝杠由第二电机驱动。
优选的,所述加工机构包括平面移动结构和加工元件,所述平面移动结构包括第一向滑动件和设置在第一向滑动件上的第二向滑动件,所述第二项滑动件上设置有固定件,所述加工元件设置在固定件上,所述第一向滑动件滑动的设置于支撑柱。
优选的,所述平面移动结构的下方可拆卸的设置有承载台。
优选的,所述加工机构还包括卷扬机,所述卷扬机驱动第一向滑动件沿支撑柱运动。
本发明的上述方案有如下的有益效果:
在本申请中定位机构和连杆可调整定位横梁之间的距离,使得本申请适用于大于六米的大型圆环件,适应范围更广,定位机构配合对心调整机构可实现精准定位,方便调整;主动轮沿圆环件端面行走,能够带动本申请移动,保证本申请不受圆环件垂直度的影响,对于不同摆放位置的圆环件均可加工。
附图说明
图1是本发明的俯视图;
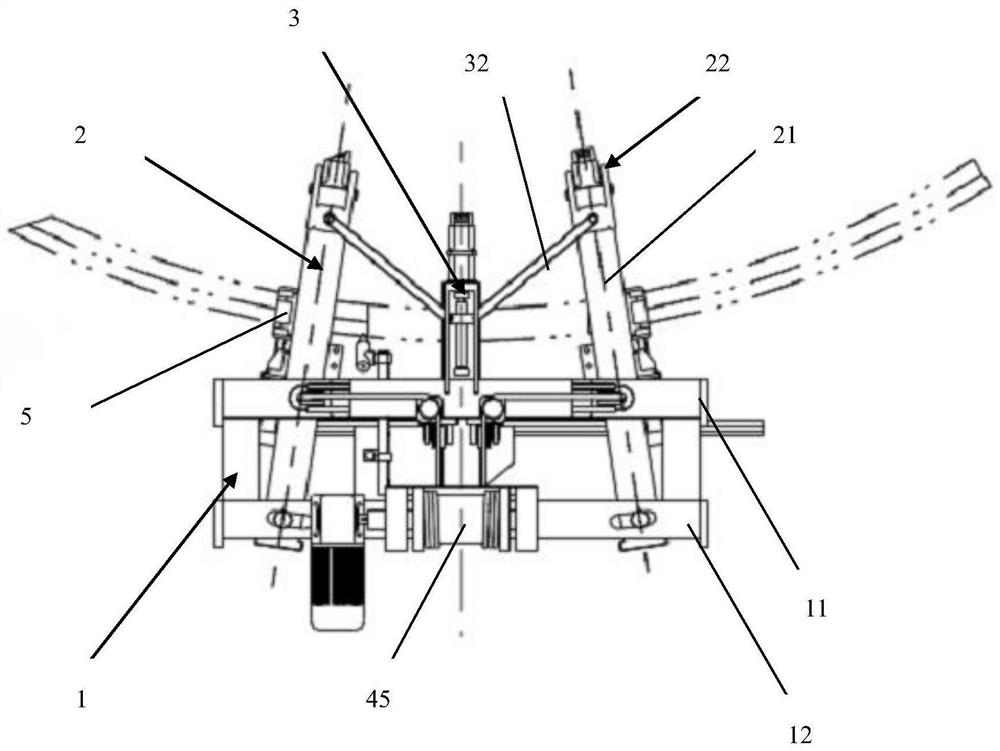
图2是本发明的第一视角图;
图3是本发明的第二视角图。
【附图标记说明】
1-支架、11-第一横梁、12-第二横梁;
2-定位机构、21-定位横梁、22-锁紧结构、221-第二主动丝杠、222-锁紧板、223-第二从动轮、
3-对心调整机构、31-调整梁、32-连杆、33-对准仪、
4-支撑柱、41-第一从动轮、42-加工机构、43-平面移动结构、44-加工元件、45-卷扬机、
5-主动轮。
具体实施方式
为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
如图1-3所示,本发明的实施例提供了一种大型圆环件加工设备,用以实现大型圆环件U型缺口及缺口坡口的切割,包括由第一横梁11和第二横梁12构建的支架1,其中第一横梁11与第二横梁12平行设置,并且通过连接梁形成矩形的支架1,在第二横梁12的两端中心对称设置有腰型槽。
定位机构2,包括定位横梁21,定位横梁21的数量为两个,任意定位横梁21的一端活动连接于腰型槽内,定位横梁21中部转动连接于第一横梁11。定位横梁21以定位横梁21和第一横梁11的转动连接处为转动中心进行转动,定位横梁21的转动角度由腰型槽的长度决定。进一步的,在定位横梁21远离腰型槽的一端设置有锁紧结构22,该锁紧结构22可以沿着定位横梁21的长度方向移动,该锁紧结构22的作用是将本申请固定于大型圆环件上。
本申请还包括支撑柱4,该支撑柱4设置在第一横梁11的下端,支撑柱4朝向锁紧结构22的一侧设置有第一从动轮41。
在前述的技术方案上,第一从动轮41和锁紧结构22配合可以将本申请固定在不同直径的圆环件的侧壁上。进一步的,锁紧机构22朝向腰型槽的一侧设置有第二从动轮223。
第一从动轮41与圆环件的外壁接触,第二从动轮223与圆环件的内壁接触,通过夹紧第一从动轮41和第二从动轮223,保证了本申请可以牢固的安装在圆环件上,避免在切割时出现滑动的情况。
除此之外,由于第二从动轮223可以随着定位横梁21的转动而调整第二从动轮223与圆环件内壁的接触面积,可以有效的增加摩擦力,防止出现打滑的情况,也使得本申请可以适用于不同尺寸的圆环件。第一从动轮41优选的在同一支撑柱4上设置有两个,保证第一从动轮41滚动在圆环件的外壁时依旧可以保持稳定,配合上第二从动轮223,实现防滑和夹持的效果,具有较好的稳定性。
为了更好的实现上述技术方案所提到的技术效果,锁紧结构22包括第二主动丝杠221,在第二主动丝杠221上设置有锁紧板222,第二主动丝杠221推动锁紧板222沿定位横梁21长度方向移动,第二从动轮223设置在锁紧板222上。第二主动丝杠221由第二电机驱动。优选的,锁紧板222与第二从动轮223之间设置有压力传感器。压力传感器的作用是检测第二从动轮223与大型圆环件内壁的压力,便于调整第二主动丝杠221的工作状态。本申请还包括对心调整机构3,对心调整机构3包括调整梁31,调整梁31上设置有对准仪33。调整梁31设置在两个定位横梁21之间并且与第一横梁11的中部连接。调整梁31设置有连杆32,该连杆32用于拉动两个定位横梁21相互靠近。
优选的,连杆32可以选择具有伸缩结构的元件,如电动伸缩杆,电动伸缩杆的一端转动连接在调整梁31上,另一端转动连接在定位横梁21上,当电动伸缩杆伸长或者缩短时,可以推开或者拉进定位横梁21。
本申请还提供了另外一种形式的连杆32,包括滑块和两个连接杆,滑块设置在调整梁31上,并且可以沿着调整梁31的长度方向滑动,两个连接杆一端与滑块转动连接,另一端与定位横梁21转动连接。滑块的滑动可以通过第一主动丝杠驱动,实现将回转运动转换为直线运动,第一主动丝杠由第一电机驱动。
为了实现精确控制,第一电机、第二电机选择伺服电机作为动力源。本申请还包括加工机构42,加工机构42设置在支撑柱4上,优选的,加工机构42设置在支撑柱4远离锁紧结构22的一侧,避免与锁紧结构22之间发生干扰。锁紧结构22具体包括平面移动结构43和加工元件44,平面移动结构43包括第一向滑动件和设置在第一向滑动件上的第二向滑动件,在第二向滑动件上设置有用于支撑加工元件44的固定件。优选的第一向滑动件滑动的设置在支撑柱4上,并且通过卷扬机45驱动第一向滑动件沿支撑柱4运动。加工元件44可以是三轴切割机,也可以是三轴焊接机。
平面移动结构的下方可拆卸的设置有承载台,用于承托操作人员或者辅助设备。更进一步的,在定位横梁21上还设置有主动轮5,主动轮5位于锁紧结构22与支撑部之间,主动轮5可以与圆环件的端面发生接触,并且随着主动轮5的转动可以带动本申请移动,配合上第一从动轮41和第二从动轮223,使得本申请在移动的过程中也具有较好的稳定性。
为了实现自动化控制和操作,本申请还可以加入PLC分别与第一电机、压力传感器、连杆32、对准仪33、平面移动结构43、加工元件44、卷扬机45、主动轮5进行信号连接,用以收集和发出信号。其中主动轮可以与PLC信号连接,也可以采用更为灵活的单独控制。
本申请的具体操作如下:
1、将本申请移动至待切割缺口位置,将定位机构2安装在工件上;
2、调整对心调整机构3,将结构对正工件中心,调整定位机构2,使第一从动轮41和第二从动轮223夹紧工件,将本申请固定在工件上并定位;
3、通过主动轮5沿圆环行走,准确定位在切割位置;
4、按工件缺口切割工艺的要求,手动调整加工元件44的角度并锁紧;
5、手动操作数控切割机构,将割枪移动至U形缺口切割起始点;按程序控制使割枪沿固定轨迹空程运行,确定路径无误后程序归零;
6、点火切割。缺口切割完成后,按照工件尺寸要求,调整加工元件44角度,调用坡口切割程序,完成缺口坡口的切割(切割平面时定位机构2不行走,利用平面移动结构43行走,切割弧面坡口时利用主动轮5行走,加工元件44固定在平面移动结构43上)。
7、该工作范围内所有U形缺口及缺口坡口切割完成后,利用主动轮5,行走至下一工作位置,
8、所有工作完成后,利用设备顺序切除环形工艺余量,使工件达到图纸设计的形状。
本申请的优点是:
1.结构简单,定位精准,体积小,便于携带及现场组装。
2.可加入PLC实现数控控制,保证切割尺寸和精度,能够实现五轴切割、焊接的效果。
3.主动轮5可在带动本申请移动的同时,减小本申请与工件之间的阻力,避免较大的阻力影响到本申请的行进,造成切割卡顿,保证本申请具有较好的切割可达性。
4.本申请还可以不受工件摆放位置、垂直度等条件影响,对场地要求较低。
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种隧道掘进机大型环件加工设备
- 一种大型铝合金环件的校圆方法