一种仿形轨道割胶装置
文献发布时间:2023-06-19 12:24:27
技术领域
本发明属于农业机械技术领域,尤其涉及一种仿形轨道割胶装置。
背景技术
天然橡胶与钢铁、石油、煤炭并称为四大工业原料,是国民经济的重要基础产业之一。其作为工业设备和生活用品的制造原料,在工业生产和日常生活中起着举足轻重的作用。自从橡胶的用处被发现以来,橡胶在中国和全球的需求量就急剧上升,然而橡胶在国内的产量始终增长缓慢,这与国内割胶技术紧密相关。我国天然橡胶种植面积已超过1700万亩,但目前仍完全依赖人工割胶。简单的手持式割胶工具割胶难度高、安全性差、效率低,再加上胶工短缺等,一直严重限制橡胶产量的提升。现有的割胶装置多为“一机一树”式,即需要为每一颗橡胶树都装配一套割胶装置,其安装过程繁琐,成本也很高;在其工作过程中,还需要人工干预,固定其割胶位置,且其易损耗,维护成本高。因此,这就导致“一机一树”式割胶装置不能进行大规模推广,无法正式投入使用。
综上所述,如何克服了人工割胶的困难和“一机一树”式割胶装置的局限性,已经成为亟需解决问题。
发明内容
为了克服现有技术存在的一系列缺陷,本发明的目的在于针对上述问题,提供一种仿形轨道割胶装置,包括仿形割胶轨道部分1和刀架部分2,所述仿形割胶轨道部分1包括仿形割胶轨道11和仿轨迹齿条12;所述仿轨迹齿条12固定安装在所述仿形割胶轨道11内侧中间位置,仿形割胶轨道11起导向作用,使刀架部分2沿着仿形割胶轨道11运动以实现割胶作业。
优选地,所述仿形割胶轨道11仿照人工割胶的割线呈类螺旋形。
优选的,所述刀架部分2包括移动刀架21和割胶刀22;所述割胶刀22固定安装在所述移动刀架21上方,所述移动刀架21带动所述割胶刀22运动。
优选的,所述移动刀架21包括减速电机211、定位块212、牛眼轮213、齿轮轴214、限位立柱216和轴承215,其中,
所述移动刀架21利用减速电机211作为动力源,通过齿轮轴214传递动力,经过仿轨迹齿条12和齿轮轴214啮合,滑动安装在所述仿形割胶轨道11上。
优选地,所述移动刀架21的上下端分别设置有上部安装板和下部安装板,所述定位块212和所述牛眼轮213组装后固定安装在所述下部安装板的外侧位置;所述限位立柱216和所述轴承215组装后固定安装在所述上部安装板的内侧位置。
优选地,定位块212和牛眼轮213的组合设置有不同长度的四组,用于辅助齿轮轴214传递动力,实现移动刀架21沿着仿形割胶轨道11运动。
优选的,轴承215和限位立柱216的组合设置有六组,用于固定移动刀架21,防止移动刀架21在运动过程中发生晃动损伤仿轨迹齿条12和齿轮轴214以及影响割胶作业的效果。
优选的,移动刀架21上方还设置有限位装置和自适应装置,以自动调节割胶刀22与橡胶树之间的距离,使其适应不同直径的橡胶树和树体表面凹凸不平的地方。
优选的,移动刀架21上方设置有方便替换割胶刀22的装置,以替换不同样式的割胶刀22。
优选的,仿形轨道割胶装置还包括机械臂连接位置13,以实现与机械臂的连接。
与现有技术相比,本发明具备以下有益效果:
本发明在一定程度上克服了人工割胶的困难和“一机一树”式割胶装置的局限性,刀架部分的限位装置和自适应装置能够自动调节割胶刀与橡胶树之间的距离,使其适应不同直径的橡胶树和树体表面凹凸不平的地方;其次,在进行割胶作业时,上位机控制机械臂将割胶装置移动至橡胶树上一次割胶位置前方,通过深度传感器测距,控制仿形割胶轨道与橡胶树之间的距离并固定,避免在割胶作业时割胶装置发生晃动影响割胶效果;最后,整个割胶作业仅依靠割胶装置来实现,有效的避免了割胶装置与机械臂之间的同步性问题。
附图说明
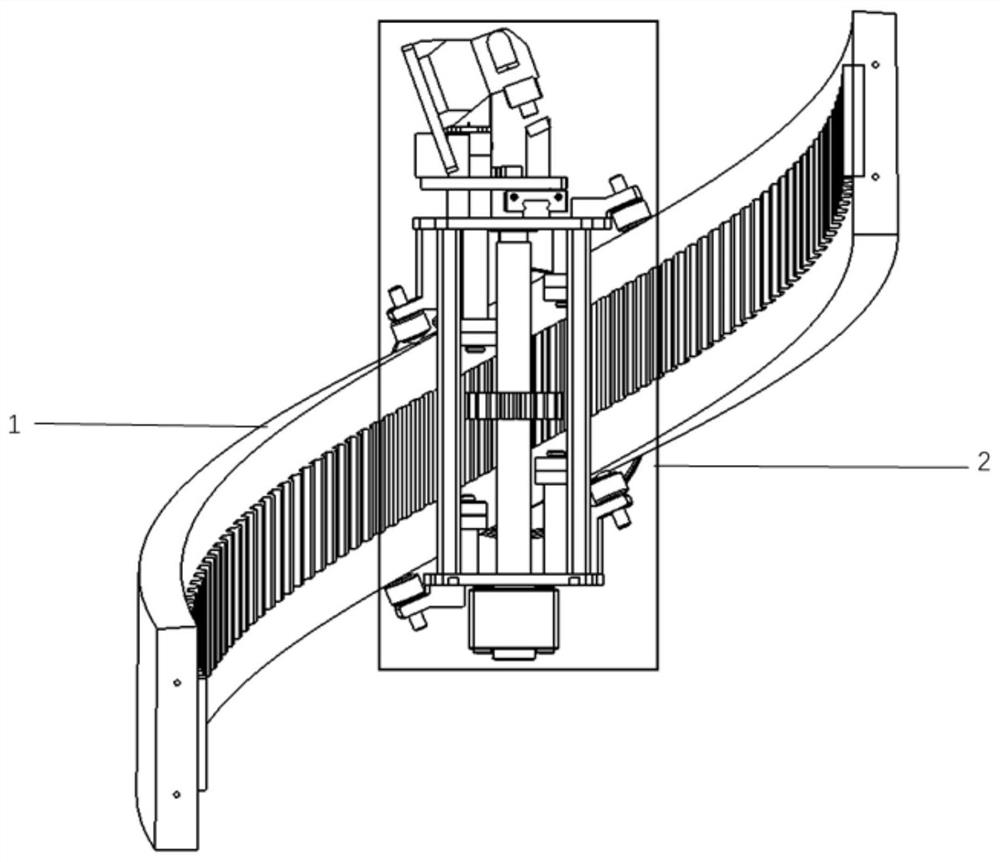
图1为本发明一种仿形轨道割胶装置的主视图;
图2为本发明一种仿形轨道割胶装置的侧视图;
图3为本发明一种仿形轨道割胶装置中刀架部分的结构示意图。
图中附图标记:
1-仿形割胶轨道部分,2-刀架部分,11-仿形割胶轨道,12-仿轨迹齿条,13-机械臂连接位置,21-移动刀架,22-割胶刀,211-减速电机,212-定位块,213-牛眼轮,214-齿轮轴,215-轴承,216-限位立柱。
具体实施方式
为使本发明实施的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施例是本发明一部分实施例,而不是全部的实施例。
基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
下面通过参考附图描述的实施例以及方位性的词语均是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
本发明的一个宽泛实施例中,一种仿形轨道割胶装置,包括仿形割胶轨道部分1和刀架部分2,所述仿形割胶轨道部分1包括仿形割胶轨道11和仿轨迹齿条12;所述仿轨迹齿条12固定安装在所述仿形割胶轨道11内侧中间位置,仿形割胶轨道11起导向作用,使刀架部分2沿着仿形割胶轨道11运动以实现割胶作业。
优选地,所述仿形割胶轨道11仿照人工割胶的割线呈类螺旋形。
优选的,所述刀架部分2包括移动刀架21和割胶刀22;所述割胶刀22固定安装在所述移动刀架21上方,所述移动刀架21带动所述割胶刀22运动。
优选的,所述移动刀架21包括减速电机211、定位块212、牛眼轮213、齿轮轴214、限位立柱216和轴承215,其中,
所述移动刀架21利用减速电机211作为动力源,通过齿轮轴214传递动力,经过仿轨迹齿条12和齿轮轴214啮合,滑动安装在所述仿形割胶轨道11上。
优选地,所述移动刀架21的上下端分别设置有上部安装板和下部安装板,所述定位块212和所述牛眼轮213组装后固定安装在所述下部安装板的外侧位置;所述限位立柱216和所述轴承215组装后固定安装在所述上部安装板的内侧位置。
优选地,定位块212和牛眼轮213的组合设置有不同长度的四组,用于辅助齿轮轴214传递动力,实现移动刀架21沿着仿形割胶轨道11运动。
优选的,轴承215和限位立柱216的组合设置有六组,用于固定移动刀架21,防止移动刀架21在运动过程中发生晃动损伤仿轨迹齿条12和齿轮轴214以及影响割胶作业的效果。
优选的,移动刀架21上方设置有限位装置和自适应装置,以自动调节割胶刀22与橡胶树之间的距离,使其适应不同直径的橡胶树和树体表面凹凸不平的地方。
优选的,移动刀架21上方设置有方便替换割胶刀22的装置,以替换不同样式的割胶刀22。
优选的,仿形轨道割胶装置还包括机械臂连接位置13,以实现与机械臂的连接。
下面结合附图,列举本发明的优选实施例,对本发明作进一步的详细说明。
如图1的仿形轨道割胶装置的主视图和图2的仿形轨道割胶装置的侧视图所示,该装置主要由仿形割胶轨道部分1和刀架部分2构成,仿形割胶轨道部分1包括仿形割胶轨道11和仿轨迹齿条12,其中,仿形割胶轨道11仿照人工割胶的割线呈类螺旋形,仿轨迹齿条12固定安装在仿形割胶轨道11内侧中间位置;刀架部分2包括移动刀架21和割胶刀22,刀架部分2滑动安装在仿形割胶轨道11上,固定安装在刀架上方的割胶刀22用于橡胶树的割胶作业。
为了使上述特征和优点更加清晰明了,以下进行详细说明。
如图1-2所示,仿形轨道割胶装置通过机械臂连接位置13与机械臂连接,在进行割胶作业时,只需控制机械臂将割胶装置移动至橡胶树上一次割胶位置前方,通过深度传感器测距,控制仿形割胶轨道部分1与橡胶树之间的距离并固定,避免在割胶作业时割胶装置发生晃动影响割胶效果。本发明根据胶工的经验和人工割胶的割线,研制出最优化的仿形割胶轨道部分1。其中,仿形割胶轨道11起导向作用,使刀架部分2能够沿着其走出类螺旋形的轨迹并切割出类螺旋形的割线;仿轨迹齿条12用于传递动力,实现刀架部分2沿仿形割胶轨道11运动。
在本发明中,使用仿形割胶轨道部分1的好处在于,仿形割胶轨道11能够适用于绝大多数成年的橡胶树,克服了“一机一树”式割胶装置局限性,且不需要为每一颗橡胶树都研制一套割胶轨道。
如图3所示,刀架部分2包括移动刀架21和割胶刀22两部分,割胶刀22固定安装在移动刀架21上方。移动刀架21包括减速电机211、定位块212、牛眼轮213、齿轮轴214、轴承215和限位立柱216。其中,减速电机211固定安装在下部安装板的下方,定位块212和牛眼轮213组装后安装在下部安装板的外侧位置,轴承215和限位立柱216组装后安装在上部安装板的内侧位置。4组不同长度的定位块212和牛眼轮213用于辅助齿轮轴214传递动力,实现移动刀架21沿着仿形割胶轨道11运动,6组不同长度的轴承215和限位立柱216用于固定移动刀架21,防止移动刀架21在运动过程中发生晃动损伤仿轨迹齿条12和齿轮轴214以及影响割胶作业的效果。刀架部分利用减速电机211作为动力源,通过齿轮轴214传递动力,经过仿轨迹齿条12和齿轮轴214啮合后沿着仿形割胶轨道11向上运动。移动刀架21上方的限位装置和自适应装置能够自动调节割胶刀22与橡胶树之间的距离,使其适应不同直径的橡胶树和树体表面凹凸不平的地方。与此同时,在移动刀架21上方也设计了可方便替换割胶刀22的装置,能够替换不同样式的割胶刀22。
最后需要指出的是:以上实施例仅用以说明本发明的技术方案,而非对其限制。尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种仿形轨道割胶装置
- 一种挠性仿形割胶装置