一种无人驾驶船舶的制动装置
文献发布时间:2023-06-19 12:25:57
技术领域
本发明属于船舶技术领域,具体是指一种无人驾驶船舶的制动装置。
背景技术
船舶,各种船只的总称。船舶是能航行或停泊于水域进行运输或作业的交通工具,按不同的使用要求而具有不同的技术性能、装备和结构型式,在小型船舶行驶过程中需要对小型船舶进行制动,现有技术中,通过螺旋桨反向转动实现制动。然而传统的反向转动螺旋桨制动的方式,再出现紧急情况时,制动效果不理想、可靠性低。
发明内容
为了解决上述难题,本发明提供了一种通过驱动电机控制制动板伸出,增加与水的接触面积,提高阻力,实现紧急制动的无人驾驶船舶的制动装置。
为了实现上述功能,本发明采取的技术方案如下:一种无人驾驶船舶的制动装置,包括制动板、固定套块、外壳、传动仓、驱动电机、隔板、旋转杆和缆索,所述隔板设于外壳内,所述驱动电机设于隔板顶部且设于外壳内上壁下,所述传动仓设于隔板下,所述驱动电机连接于传动仓,所述固定套块对称设于外壳内壁侧面上,所述旋转杆一端可转动设于固定套块内,所述旋转杆另一端固定连接于传动仓,所述缆索对称缠绕设于旋转杆上,所述制动板可移动贯穿设于外壳底壁设置,所述制动板设于缆索下,驱动电机通过传动仓控制旋转杆转动,收卷或者放下缆索,实现制动板升降,利用制动板增加与水的接触面,增加船舶受到的阻力,进而实现紧急制动。
进一步地,所述传动仓包括仓体、主动齿轮和从动齿轮,所述仓体设于隔板下,所述齿轮设于仓体内上壁下,所述从动齿轮对称设于仓体内,所述从动齿轮与主动齿轮啮合设置,通过主动齿轮和从动齿轮传动,实现驱动电机控制旋转杆转动。
进一步地,所述缆索与旋转杆连接处设有限位套环,所述限位套块固定套接于旋转杆上,所述线缆缠绕设于限位套块上。
进一步地,所述外壳内壁侧面上对称设有限位板,所述限位板下和外壳内壁底面之间设有限位杆,所述限位杆上可移动套接设有移动套环,所述移动套环设于制动板侧面上,增加制动板下降和升降的稳定性,避免制动板发生晃动,影响装置的使用寿命和安全性。
进一步地,所述外壳内壁底面靠近制动板的一端处设有底面套环,所述底面套环固定设于外壳内壁底面上且套接于制动板上。
本发明采取上述结构取得有益效果如下:本发明提供的一种无人驾驶船舶的制动装置操作简单,机构紧凑,设计合理,驱动电机通过传动仓控制旋转杆转动,收卷或者放下缆索,实现制动板升降,利用制动板增加与水的接触面,增加船舶受到的阻力,进而实现紧急制动,并且利用限位板、移动套环和限位杆,增加制动板下降和升降的稳定性,避免制动板发生晃动,影响装置的使用寿命和安全性。
附图说明
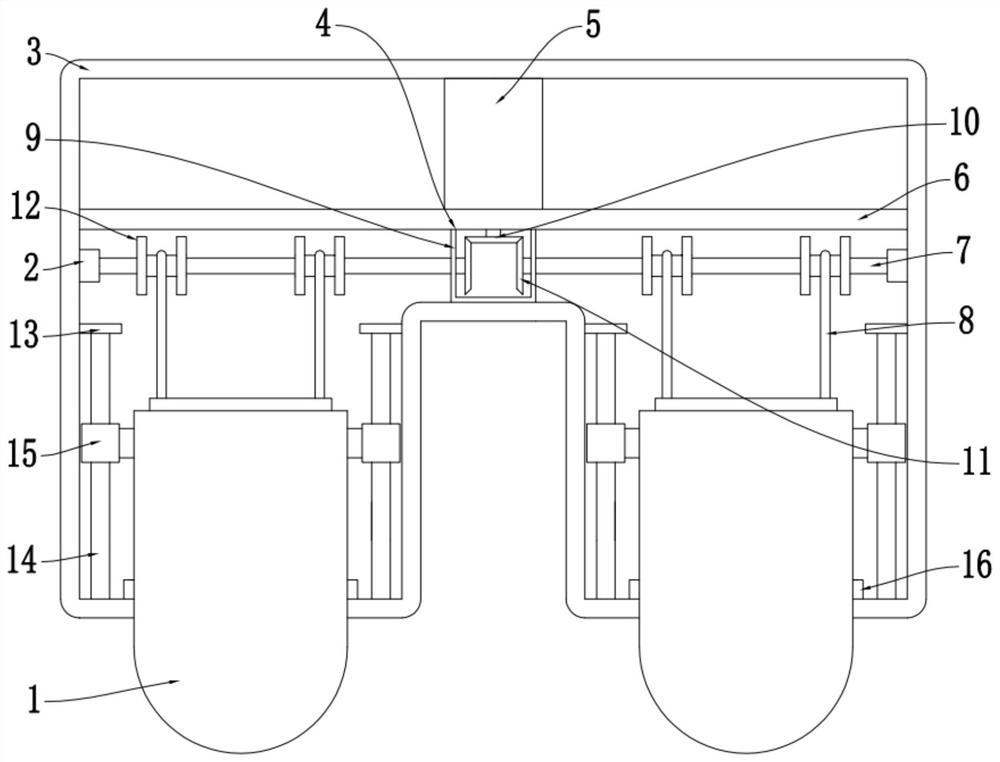
图1为本发明一种无人驾驶船舶的制动装置的整体结构图。
其中,1、制动板,2、固定套块,3、外壳,4、传动仓,5、驱动电机,6、隔板,7、旋转杆,8、缆索,9、仓体,10、主动齿轮,11、从动齿轮,12、限位套环,13、限位板,14、限位杆,15、移动套环,16、底面套环。
具体实施方式
下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。以下结合附图,对本发明做进一步详细说明。
如图1所述,本发明一种无人驾驶船舶的制动装置,包括制动板1、固定套块2、外壳3、传动仓4、驱动电机5、隔板6、旋转杆7和缆索8,所述隔板6设于外壳3内,所述驱动电机5设于隔板6顶部且设于外壳3内上壁下,所述传动仓4设于隔板6下,所述驱动电机5连接于传动仓4,所述固定套块2对称设于外壳3内壁侧面上,所述旋转杆7一端可转动设于固定套块2内,所述旋转杆7另一端固定连接于传动仓4,所述缆索8对称缠绕设于旋转杆7上,所述制动板1可移动贯穿设于外壳3底壁设置,所述制动板1设于缆索8下。
所述传动仓4包括仓体9、主动齿轮10和从动齿轮11,所述仓体9设于隔板6下,所述齿轮设于仓体9内上壁下,所述从动齿轮11对称设于仓体9内,所述从动齿轮11与主动齿轮10啮合设置。
所述缆索8与旋转杆7连接处设有限位套环12,所述限位套块固定套接于旋转杆7上,所述线缆缠绕设于限位套块上。
所述外壳3内壁侧面上对称设有限位板13,所述限位板13下和外壳3内壁底面之间设有限位杆14,所述限位杆14上可移动套接设有移动套环15,所述移动套环15设于制动板1侧面上。
所述外壳3内壁底面靠近制动板1的一端处设有底面套环16,所述底面套环16固定设于外壳3内壁底面上且套接于制动板1上。
具体使用时,启动驱动电机5,驱动电机5带动主动齿轮10旋转,主动齿轮10控制从动齿轮11转动,进而带动旋转杆7旋转,旋转杆7收卷线缆,实现制动板1下降,同时移动套环15在限位杆14下降,利用制动板1增加与水的接触面,增加船舶受到的阻力,进而实现紧急制动。
以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
- 一种无人驾驶船舶的制动装置
- 一种无人驾驶汽车双余度制动系统执行装置及汽车制动系统