一种无动力人体下肢外骨骼
文献发布时间:2023-06-19 12:25:57
技术领域
本发明涉及生物工程技术领域,特别涉及一种无动力人体下肢外骨骼。
背景技术
下肢外骨骼产生于进入21世纪以来小规模的作战对于提高单个士兵作战能力的迫切需要。在自然灾害发生,很多大型车辆与装备无法进入的时候,就只能通过人去完成救援任务,但是人的体力是有限的,在外骨骼的单人负重增强作用下就可以充分发挥人的作用,在宝贵的时间内完成更长的行军跋涉、后勤物资搬运、物流配送、救灾抢险。但随之而来的就是驱动外骨骼的能源动力问题,穿戴外骨骼后还需要带上足够的能源才可以进行长时间的工作,而外骨骼自身携带的能源越多,自重也就越大,工作时间反而减少。
发明内容
本发明的目的在于克服现有技术的不足,提供了一种无动力人体下肢外骨骼,一种不需要额外能源动力、人机交互的无动力人体下肢外骨骼有着重要的实用价值。
本发明的目的是通过以下技术方案来实现的:
一种无动力人体下肢外骨骼,包括髋关节部件、大腿部件和小腿部件,所述髋关节部件的两侧分别与两个所述大腿部件的上端相连,每个所述大腿部件的下端与所述小腿部件的上端相连;
所述髋关节部件包括背架箱体、负载杆、第一液压缸、第二液压缸、液压管、限位组件和传动组件,所述第一液压缸固定设置在所述背架箱体的底面上,所述第一液压缸上的第一活塞杆穿过所述背架箱体的顶部后与所述负载杆同轴固定连接,所述背架箱体的两侧呈对称固定设置有所述第二液压缸,所述第二液压缸固定在所述背架箱体的顶部上侧,所述第二液压缸上的第二活塞杆朝下设置,且所述第二活塞杆的端部固定设置有伸缩式的所述限位组件,两个所述第二活塞杆及所述第一活塞杆互相平行,所述背架箱体的两侧呈对称设置有滑动式的所述传动组件,所述传动组件与所述大腿部件的上端相连,所述背架箱体设置有用于驱动所述限位组件伸缩的挡板,所述第一液压缸上呈对称连接有所述液压管,两个所述液压管的另一端分别与两个所述第二液压缸相连。
进一步地,所述传动组件包括支撑杆、第一髋关节连接器和第二髋关节连接器,所述第一髋关节连接器滑动设置在两个互相平行的所述支撑杆上,所述支撑杆的两端均与所述背架箱体固定相连,所述第二髋关节连接器通过螺钉固定在所述第一髋关节连接器上,所述第一髋关节连接器与所述第二髋关节连接器之间形成滑动槽,所述滑动槽中滑动的方向垂直于两个所述第二活塞杆所在的平面,所述滑动槽两侧的侧壁上呈对称设置有贯穿的滑动孔,所述支撑杆与所述第二活塞杆平行,所述挡板设置在所述支撑杆与所述第二活塞杆之间,两个所述滑动孔分别设置在所述第一髋关节连接器上和所述第二髋关节连接器上。
进一步地,所述限位组件包括锁体、锁体盖、第一弹簧和锁舌,所述锁体固定设置在所述第二活塞杆上,所述锁体的内部设置贯穿的第一伸缩孔,所述第一弹簧设置在所述第一伸缩孔中,且所述第一弹簧的一端与所述锁体盖相连,所述第一弹簧的另一端与所述锁舌相连,所述锁体盖固定设置在所述第一伸缩孔的一端,所述锁舌与所述第一伸缩孔的另一端滑动配合,所述锁舌上设置有在所述挡板作用下驱动所述锁舌伸缩的倾斜面,所述锁舌设置在所述第二活塞杆与所述支撑杆之间。
进一步地,所述大腿部件包括大腿杆、第一连接杆和膝关节板,所述大腿杆的上端与所述滑动槽配合,且所述大腿杆上端的两侧呈对称设置有与所述滑动孔配合的凸起,所述大腿杆的下端与所述小腿部件铰接,且所述大腿杆下端的两侧呈对称设置有所述第一连接杆,所述第一连接杆上设置有所述膝关节板,两个所述膝关节板的外侧均与所述小腿部件配合。
进一步地,所述小腿部件包括调节组件、小腿前杆、小腿后杆、第二连接杆、足底板和第二弹簧,所述小腿后杆的上端与所述大腿杆之间铰接,所述小腿后杆与所述足底板的后端中部铰接,所述足底板的中部两侧呈对称设置有所述小腿前杆,所述小腿前杆的下端与所述足底板之间铰接,所述小腿前杆的上端设置有与所述膝关节板配合的所述调节组件,所述小腿前杆的中部与所述小腿后杆的中部通过所述第二连接杆相连,所述小腿前杆与所述足底板的后端通过所述第二弹簧相连。
进一步地,所述足底板上设置有用于将所述足底板固定在人的脚上的固定孔。
进一步地,所述第二连接杆与所述小腿前杆之间铰接,所述第二连接杆与所述小腿后杆之间铰接。
进一步地,所述调节组件包括导轨外套、端部盖子、第三弹簧、第一棘轮、第二棘轮和调节杆,所述导轨外套固定设置在所述小腿前杆的上端,所述导轨外套内部设置有贯穿的第二伸缩孔,所述第一棘轮和所述第二棘轮均设置在所述第二伸缩孔内部且与所述第二伸缩孔配合,所述第一棘轮与所述第二棘轮配合,所述第三弹簧的一端与所述第一棘轮相连,所述第三弹簧的另一端与所述端部盖子相连,所述端部盖子固定设置在所述第二伸缩孔的一端,所述调节杆的一端与所述第二棘轮固定相连,所述调节杆的另一端穿过所述第二伸缩孔的另一端后与所述膝关节板配合。
进一步地,所述膝关节板上设置有与所述调节杆配合的调节槽。
进一步地,所述调节槽的上侧设置有滑动面,所述调节槽的下侧设置有卡紧面,所述滑动面与所述卡紧面相对设置。
本发明的有益效果是:
(1)在本发明中,不需要额外的动力驱动就能使得人体下肢外骨骼跟随人一起运动,而且可以有效的承载物体的重量。
(2)在本发明中,人体下肢外骨骼完全可以与人配合,调节组件与膝关节板的配合使用可以使得人更方便前进。
附图说明
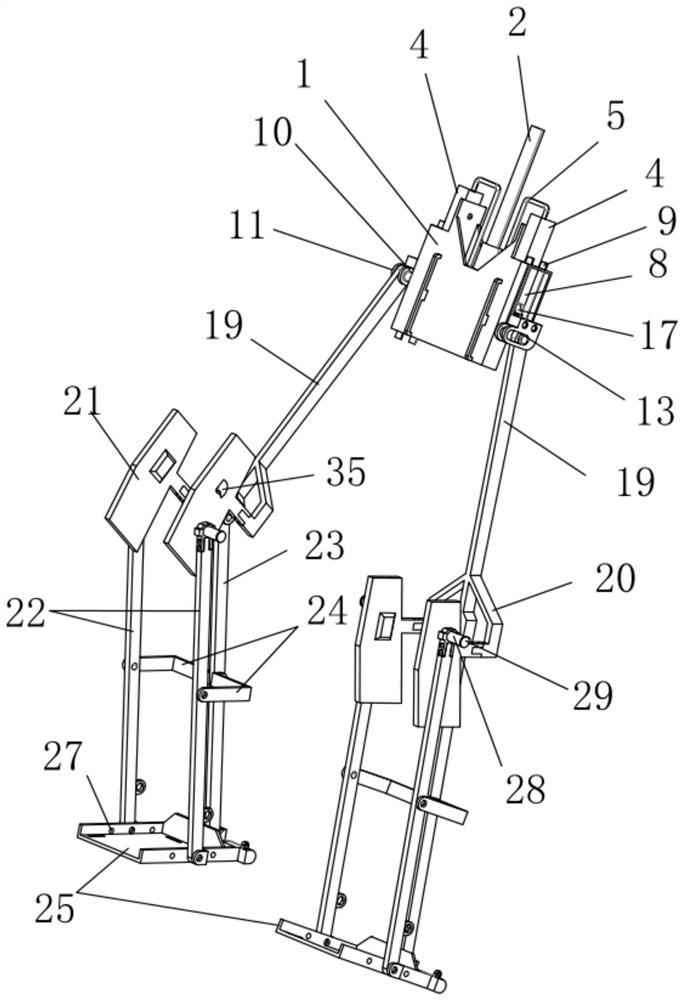
图1为本无动力人体下肢外骨骼的立体图;
图2为背架箱体的连接结构图;
图3为本无动力人体下肢外骨骼的俯视图;
图4为腿部件与小腿部件之间连接的侧视图;
图5为腿部件与小腿部件之间连接的主视图;
图6为调节组件的连接结构图;
图7为摆腿过程中,调节组件变化时的连接结构图;
图8为复立阶段外骨骼背架状态;
图9为前倾阶段外骨骼背架状态;
图10为摆腿阶段外骨骼背架状态图。
图中,1-背架箱体,2-负载杆,3-第一液压缸,4-第二液压缸,5-液压管,6-第一活塞杆,7-第二活塞杆,8-挡板,9-支撑杆,10-第一髋关节连接器,11-第二髋关节连接器,12-滑动槽,13-滑动孔,14-锁体,15-锁体盖,16-第一弹簧,17-锁舌,18-第一伸缩孔,19-大腿杆,20-第一连接杆,21-膝关节板,22-小腿前杆,23-小腿后杆,24-第二连接杆,25-足底板,26-第二弹簧,27-固定孔,28-导轨外套,29-端部盖子,30-第三弹簧,31-第一棘轮,32-第二棘轮,33-调节杆,34-第二伸缩孔,35-调节槽,36-滑动面,37-卡紧面。
具体实施方式
下面将结合实施例,对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
参阅图1-10,本发明提供一种技术方案:
一种无动力人体下肢外骨骼,包括髋关节部件、大腿部件和小腿部件,髋关节部件的两侧分别与两个大腿部件的上端相连,每个大腿部件的下端与小腿部件的上端相连;髋关节部件包括背架箱体1、负载杆2、第一液压缸3、第二液压缸4、液压管5、限位组件和传动组件,第一液压缸3固定设置在背架箱体1的底面上,第一液压缸3上的第一活塞杆6穿过背架箱体1的顶部后与负载杆2同轴固定连接,背架箱体1的两侧呈对称固定设置有第二液压缸4,第二液压缸4固定在背架箱体1的顶部上侧,第二液压缸4上的第二活塞杆7朝下设置,且第二活塞杆7的端部固定设置有伸缩式的限位组件,两个第二活塞杆7及第一活塞杆6互相平行,背架箱体1的两侧呈对称设置有滑动式的传动组件,传动组件与大腿部件的上端相连,背架箱体1上设置有用于驱动限位组件伸缩的挡板8,第一液压缸3上呈对称连接有液压管5,两个液压管5的另一端分别与两个第二液压缸4相连。其中,第一液压缸3与两个第二液压缸4通过两个液压管5后连通,第一活塞杆6和两个第二活塞杆7都在同一个平面上运动,第一活塞杆6朝向上侧,第一活塞杆6通过负载杆2支撑起人背上的重物。两个第二活塞杆7都是朝下设置,如果一个第二活塞杆7向下运动,另一个第二活塞杆7则向上运动,内部的液压油始终不会增多也不会减少。背架箱体1并非一个密封的箱体,上下有两块平行的板,第一液压缸3固定设置在下侧板上,两个第二液压缸4设置在上侧板之上。
在一些实施例中,传动组件包括支撑杆9、第一髋关节连接器10和第二髋关节连接器11,第一髋关节连接器10滑动设置在两个互相平行的支撑杆9上,支撑杆9的两端均与背架箱体1固定相连,第二髋关节连接器11通过螺钉固定在第一髋关节连接器10上,第一髋关节连接器10与第二髋关节连接器11之间形成滑动槽12,滑动槽12中滑动的方向垂直于两个第二活塞杆7所在的平面,滑动槽12两侧的侧壁上呈对称设置有贯穿的滑动孔13,支撑杆9与第二活塞杆7平行,挡板8设置在支撑杆9与第二活塞杆7之间,两个滑动孔13分别设置在第一髋关节连接器10上和第二髋关节连接器11上。其中,设置第一髋关节连接器10和第二髋关节连接器11方便大腿杆19安装在滑动槽12中,并且大腿杆19两侧的凸起可在滑动孔13中滑动,这样适应人的运动。设置两个互相平行的支撑杆9使得第一髋关节连接器10只能沿着支撑杆9上下移动,不能有别的运动方式。
在一些实施例中,限位组件包括锁体14、锁体盖15、第一弹簧16和锁舌17,锁体14固定设置在第二活塞杆7上,锁体14的内部设置贯穿的第一伸缩孔18,第一弹簧16设置在第一伸缩孔18中,且第一弹簧16的一端与锁体盖15相连,第一弹簧16的另一端与锁舌17相连,锁体盖15固定设置在第一伸缩孔18的一端,锁舌17与第一伸缩孔18的另一端滑动配合,锁舌17上设置有在挡板8作用下驱动锁舌17伸缩的倾斜面,锁舌17设置在第二活塞杆7与支撑杆9之间。其中,在承重的时候,大腿杆19承受力,这样使得第一髋关节连接器10在大腿杆19的作用下上移,而第一髋关节连接器10处于锁舌17的下侧,这样使得锁舌17上移,锁舌17上移带动上的第二活塞杆7收缩,另一侧的第二活塞杆7伸长,当锁舌17碰到挡板8的时候,在倾斜面的作用下,锁舌17收缩到第一伸缩孔18中,从而使得第一髋关节连接器10可以达到上侧;第一髋关节连接器10下移时,第一髋关节连接器10还处于锁舌17的上侧,第一髋关节连接器10与倾斜面使得锁舌17收缩到第一伸缩孔18中,从而又使得第一髋关节连接器10移动到锁舌17的下侧,然后在下次起到支撑作用。在图9中,图(h)是第一髋关节连接器10位于锁舌17下侧,图(i)是第一髋关节连接器10位于锁舌17上侧,两个图的结合是变化过程。
在一些实施例中,大腿部件包括大腿杆19、第一连接杆20和膝关节板21,大腿杆19的上端与滑动槽12配合,且大腿杆19上端的两侧呈对称设置有与滑动孔13配合的凸起,大腿杆19的下端与小腿部件铰接,且大腿杆19下端的两侧呈对称设置有第一连接杆20,第一连接杆20上设置有膝关节板21,两个膝关节板21的外侧均与小腿部件配合。其中,设置第一连接杆20和和膝关节板21方便与小腿部件上的小腿前杆22配合,方便负重时起到支撑作用。膝关节板21与第一连接杆20是可拆卸连接的,对膝盖起到保护作用。
在一些实施例中,小腿部件包括调节组件、小腿前杆22、小腿后杆23、第二连接杆24、足底板25和第二弹簧26,小腿后杆23的上端与大腿杆19之间铰接,小腿后杆23与足底板25的后端中部铰接,足底板25的中部两侧呈对称设置有小腿前杆22,小腿前杆22的下端与足底板25之间铰接,小腿前杆22的上端设置有与膝关节板21配合的调节组件,小腿前杆22的中部与小腿后杆23的中部通过第二连接杆24相连,小腿前杆22与足底板25的后端通过第二弹簧26相连。足底板25上设置有用于将足底板25固定在人的脚上的固定孔27。其中,设置小腿前杆22、小腿后杆23、第二连接杆24、足底板25和第二弹簧26,是为了配合人的小腿的运动,保证人行走时,小腿部件的运动与人的运动保持一致,而第二弹簧26是为了使得足底板25与小腿后杆23之间的夹角控制在一定的范围内。
在一些实施例中,第二连接杆24与小腿前杆22之间铰接,第二连接杆24与小腿后杆23之间铰接。第二连接杆24的结构呈L型,然后与小腿前杆22、小腿后杆23及足底板25结合后再侧面上看呈平行四边形,这样方便人行走。
在一些实施例中,调节组件包括导轨外套28、端部盖子29、第三弹簧30、第一棘轮31、第二棘轮32和调节杆33,导轨外套28固定设置在小腿前杆22的上端,导轨外套28内部设置有贯穿的第二伸缩孔34,第一棘轮31和第二棘轮32均设置在第二伸缩孔34内部且与第二伸缩孔34配合,第一棘轮31与第二棘轮32配合,第三弹簧30的一端与第一棘轮31相连,第三弹簧30的另一端与端部盖子29相连,端部盖子29固定设置在第二伸缩孔34的一端,调节杆33的一端与第二棘轮32固定相连,调节杆33的另一端穿过第二伸缩孔34的另一端后与膝关节板21配合。膝关节板21上设置有与调节杆33配合的调节槽35。调节槽35的上侧设置有滑动面36,调节槽35的下侧设置有卡紧面37,滑动面36与卡紧面37相对设置。其中,调节组件上的调节杆33与卡紧面37作用时(也就是RP区域),有助于迫使大腿杆下降。调节组件在人前进时的变化过程如图7所示,图中,(a)为摆动前期,(b)为摆动中期,(c)为摆动后期。
工作过程:
(1)复立阶段,小腿前杆22通过第一棘轮31的RP区域拉压大腿杆19,迫使大腿杆19下降。从外骨骼一侧的复立阶段开始,即大腿杆19在前一个步态周期中的摆腿阶段结束时将第二髋关节连接器11下降至最低水平线k上,而人体的负重完全由这一侧外骨骼进行承重支撑。此时另一侧外骨骼就已经结束了前倾阶段进入了摆腿阶段开始不再对人体的负重进行承重支撑,伸缩锁舌17也在中心液压缸的压力转递之下由侧边液压缸渐渐下压至最低水平线k上。复立过程中外骨骼一侧由最低水平线k向初始平衡位置o上升,这个阶段中全部的负重都由第一液压缸3通过液体压力传递至侧边第二液压缸4与背架箱体1上,再经由侧边的第二活塞杆7传递至锁舌17上,通过锁舌17的下平面传递至第二髋关节连接器11上,最后由大小腿杆传递至地面之上。
(2)前倾阶段,调节组件相对于膝关节板21上升,即调节组件上的调节杆33通过膝关节板21处的滑动面36,完成类似按压的动作,使第一棘轮31与第二棘轮32整体沿导轨回缩10mm。但在膝关节板21的侧面阻挡之下不能伸出,保持按压状态。第一棘轮31与第二棘轮32的斜齿内带有内斜面,可以在回缩过程中,使得第二棘轮32自带一个绕轴旋转的轴向力从而使第二棘轮32转动。在前倾阶段,大小腿杆随着人体的前进与前倾,会使第二髋关节连接器11从初始平衡位置o上升至设计得出的挡板8处(也就是前倾卸荷n处),即挡板8与锁舌17的上斜面接触,并且在前倾过程中第二髋关节连接器11带动锁舌17的持续上升,而在挡板8的阻挡之下,锁舌17完全缩回,完成与第二髋关节连接器11的断开,即这一侧外骨骼大小腿完成对人体负重的逐渐卸荷,同时另一侧开始进入复立阶段。
(3)摆腿阶段,第一棘轮31与第二棘轮32开始回程时,第二棘轮32被上斜面挡住,使第一棘轮31的膝关节板21点只能回弹3mm。调节杆33通过膝关节板21的斜面,完成类似按压的动作,使第一棘轮31与第二棘轮32整体回缩3mm,同时自动旋转;在下压过程中,第一棘轮31斜齿与第二棘轮32卡槽分离,但在膝关节板21的侧面阻挡之下不能伸出,保持按压状态。第一棘轮31与第二棘轮32整体在第三弹簧30的作用下回弹,可使第一棘轮31的膝关节板21点回弹10mm,完成一个动作循环。在摆腿阶段,这一侧的外骨骼的大小腿不对人体负重有任何的承重支撑作用。前期第二髋关节连接器11持续上升至最高水平m处,同时这一侧的第二液压缸4在负重的第一液压缸3压力转移下将锁舌17下压至最低处,并且锁舌17在锁体14内的第一弹簧16作用下回弹至原位。后期第二髋关节连接器11从最高水平线m处下降至最低水平线k处,下降过程中第二髋关节连接器11下压锁舌17上的斜面,使其缩回锁体14内,在下降至最低后,锁舌17没有了第二髋关节连接器11的阻挡后,又重新伸出,完成锁舌17下平面与第二髋关节连接器11上平面的连接。
通过过程1~3完成单侧无动力外骨骼在一个步态周期之内的运动。外骨骼两侧交替循环地对人体负重进行承重与支撑。
以上所述仅是本发明的优选实施方式,应当理解本发明并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本发明的精神和范围,则都应在本发明所附权利要求的保护范围内。
- 一种无动力人体下肢外骨骼
- 一种无动力下肢外骨骼机器人