一种基于垂直车位的自动泊车方法
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及自动泊车控制技术领域,尤其涉及一种基于垂直车位的自动泊车方法。
背景技术
不同的自动泊车系统采用不同的方法来检测汽车周围的物体。有些在汽车前后保险杠四周装上了感应器,它们既可以充当发送器,也可以充当接收器。这些感应器会发送信号,当信号碰到车身周边的障碍物时会反射回来。然后,车上的计算机会利用其接收信号所需的时间来确定障碍物的位置。其他一些系统则使用安装在保险杠上的摄像头或雷达来检测障碍物。但最终结果都是一样的:汽车会检测到已停好的车辆、停车位的大小以及与路边的距离,然后将车子驶入停车位。
当前垂直泊车路径规划研究主要以一次性垂直倒车入库为主,方法简单。但一次性垂直倒车入库需要占用面积较大的泊车区域,对于泊车区域较小的泊车位(例如停车场靠墙的垂直车位),采用一次性垂直倒车入库的方案容易导致车辆与障碍车辆发生碰撞。
发明内容
本发明提供一种基于垂直车位的自动泊车方法,解决了现有的垂直倒车方法占用面积较大,无法适应紧凑型的垂直车位布局的技术问题。
为解决以上技术问题,本发明提供一种基于垂直车位的自动泊车方法,包括步骤:
S1、获取泊车环境数据,当判断到当前泊车空间不满足垂直倒车入库条件时,进入步骤S2;
S2、确定目标车位,并建立泊车坐标系;
S3、根据多段规划策略和所述目标车位,计算预定义的阶段泊车节点的实际坐标;
S4、根据每一所述实际坐标控制车辆依次到达每一所述阶段泊车节点,完成泊车。
本基础方案在进行泊车之初,预先判断当前泊车空间是否满足垂直倒车入库条件,从而可为用户确定最优的泊车路线;随后根据泊车环境数据确定目标车位,并建立泊车坐标系,使得空间环境数据化;此时,根据预先设计的多段规划策略对泊车路径进行多段式规划,计算预定义的每一泊车阶段中阶段泊车节点的实际坐标,从而通过控制车辆依次到达每一阶段泊车节点,即可完成泊车,设计“后退-前进-后退”的多段式垂直泊车入库,可降低泊车空间需求,提高泊车成功率。
在进一步的实施方案中,在所述步骤S1中,所述垂直倒车入库条件为:车道两侧停车位之间的间距不小于车身最大长度与车辆前后安全距离之和;
所述车身最大长度为车身的水平对角长度,所述车辆前后安全距离包括车辆前向保险杠到前方障碍物的安全距离、车辆后向保险杠到后方障碍物的安全距离。
本基础方案在规划泊车方案时,将车辆前向保险杠到前方障碍物的安全距离、车辆后向保险杠到后方障碍物的安全距离,补入安全泊车的影响因素,同步考虑车身的水平对角长度对空间占比,可在规划阶段直接避免碰撞事故的发生。
在进一步的实施方案中,所述步骤S2具体为:识别所述泊车环境数据确定目标车位,以所述目标车位的一顶角原点、以平行于车位长度方向为X轴、以平行于车位宽度方向为Y轴建立泊车坐标系。
在进一步的实施方案中,所述步骤S3包括:
S31、根据多段规划策略和所述目标车位,将泊车路线划分为定位路段、第一修正路段、第二修正路段、入库路段;
S32、依据所述目标车位的车位尺寸、车辆的车身尺寸和预先设置的泊车起点位置,计算出泊车起点坐标;
S33、在泊车起点的基础上,计算车辆执行第一控制策略到达所述定位路段末端时车辆标志位的坐标,作为第一修正路段的起始节点的实际坐标;
S34、在第一修正路段的起始节点基础上,计算车辆执行第二控制策略到达所述第一修正路段末端时车辆标志位的坐标,作为第二修正路段的起始节点的实际坐标;
S35、在所述第二修正路段的起始节点的基础上,计算车辆执行第三控制策略到达第二修正路段末端时车辆标志位的坐标,作为入库路段的起始节点的实际坐标;
S36、在所述入库路段的起始节点的基础上,计算车辆执行第四控制策略到达入库路段末端时车辆标志位的坐标,作为入库路段的终点。
本方案设定包括定位路段、第一修正路段、第二修正路段、入库路段的多段规划策略,设定泊车起点,使得车辆进入多段规划策略的统一起点;通过定位路段执行可初步定位车辆的中轴居于平行于车位长度方向的中部区域;预设第一控制策略至第四控制策略,控制车辆完成“前进、后退”这一车辆微调,使得车辆满足一次入库要求。
在进一步的实施方案中,所述第一控制策略为,控制车辆以最小转弯半径向后倒车;
所述第二控制策略为,控制车辆以最小转弯半径向前行驶,所述第一修正路段与所述定位路段轨迹相切;
所述第三控制策略为,控制车辆以最小转弯半径向后倒车,第二修正路段与第一修正路段轨迹相切;
所述第四控制策略为,控制车辆以直线轨迹向后倒车。
本方案设定第一修正路段与定位路段轨迹相切,则是完成第一控制策略、第二控制策略的“前进、后退”,而通过控制车辆以最小转弯半径执行车辆微调,可满足小空间的车辆调整。
在进一步的实施方案中,在所述步骤S32中,当所述车辆标志位为车辆后轴中心点时,所述泊车起点坐标的计算公式如下:
其中,(x
在进一步的实施方案中,在所述步骤S33中,当所述车辆标志位为车辆后轴中心点时,执行所述第一控制策略的第一约束条件如下:
其中,(x
在进一步的实施方案中,在所述步骤S34中,当所述车辆标志位为车辆后轴中心点时,执行所述第二控制策略的第二约束条件如下:
其中,y
在进一步的实施方案中,在所述步骤S35中,当所述车辆标志位为车辆后轴中心点时:
执行所述第三控制策略的第三约束条件如下:
其中,x
在进一步的实施方案中,在所述步骤S36中,当所述车辆标志位为车辆后轴中心点时:
执行所述第四控制策略的第四约束条件如下:
在进一步的实施方案中,所述步骤S4具体为:判断所述定位路段、第一修正路段、第二修正路段、入库路段是否分别满足所述第一约束条件~第四约束条件,若是则根据每一所述实际坐标控制车辆从泊车起点依次到达每一所述阶段泊车节点进行泊车,若否则提示泊车路径不安全,结束本次泊车。
本方案针对每一阶段的泊车,均设定了对应的约束条件,通过定位路段、第一修正路段、第二修正路段、入库路段是否分别满足所述第一约束条件~第四约束条件的判断,可预测车辆泊车风险,从而预先提示用户是否可以安全泊车,降低泊车无用功。
附图说明
图1是本发明实施例提供的一种基于垂直车位的自动泊车方法的工作流程图;
图2是本发明实施例提供的泊车装置的安装、探测示意图;
图3是本发明实施例提供的车辆车身尺寸示意图;
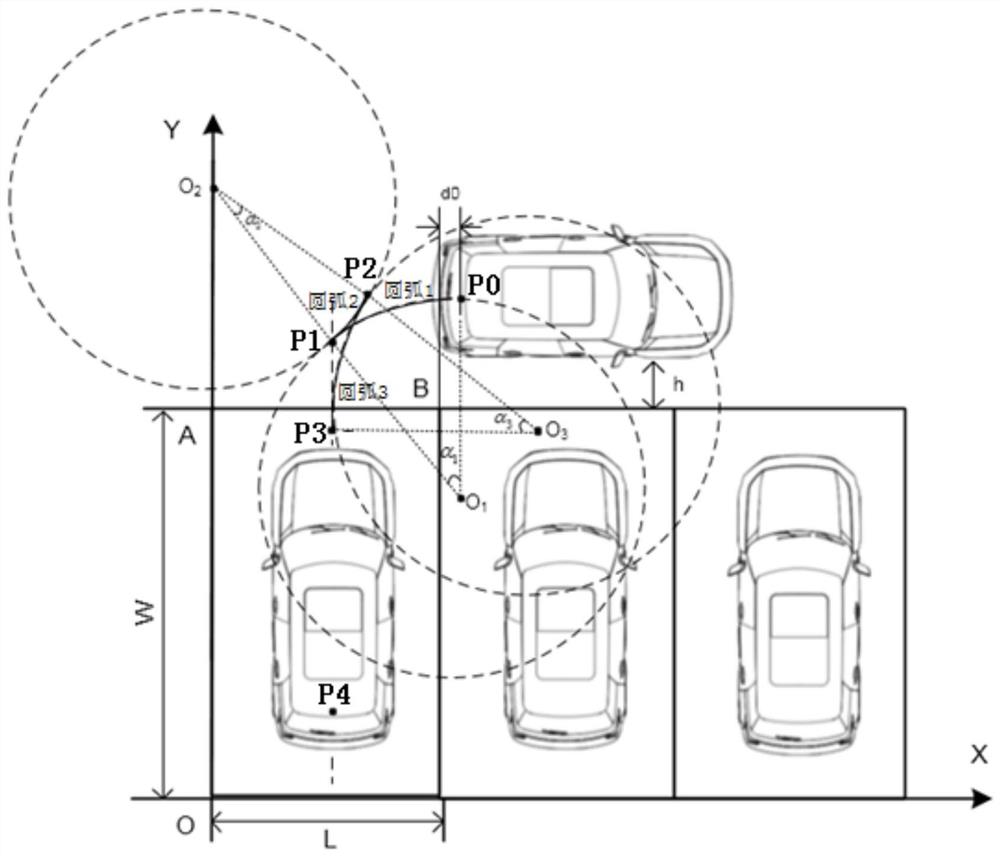
图4是本发明实施例提供的自动泊车轨迹示意图。
具体实施方式
下面结合附图具体阐明本发明的实施方式,实施例的给出仅仅是为了说明目的,并不能理解为对本发明的限定,包括附图仅供参考和说明使用,不构成对本发明专利保护范围的限制,因为在不脱离本发明精神和范围基础上,可以对本发明进行许多改变。
本发明实施例提供的一种基于垂直车位的自动泊车方法,如图1所示,在本实施例中,包括步骤S1~S4:
S1、获取泊车环境数据,当判断到当前泊车空间不满足垂直倒车入库条件时,进入步骤S2。
本实施例中的泊车环境数据包括车辆周围的车位信息以及障碍物信息……。
在具体实施时,泊车环境数据通过泊车装置来获取。参见图2,泊车装置由3颗探测距离为5m的超短距毫米波雷达(uSRR)组成,分别安装在车尾中间O10位置、车辆左侧O20位置、车辆右侧O30位置。
垂直倒车入库条件为:车道两侧停车位之间的间距不小于车身最大长度与车辆前后安全距离之和;
车身最大长度为车身的水平对角长度,车辆前后安全距离包括车辆前向保险杠到前方障碍物的安全距离、车辆后向保险杠到后方障碍物的安全距离。参见图3,为具体的车身参数示意图,其中L
本实施例在规划泊车方案时,将车辆前向保险杠到前方障碍物的安全距离、车辆后向保险杠到后方障碍物的安全距离,补入安全泊车的影响因素,同步考虑车身的水平对角长度对空间占比,可在规划阶段直接避免碰撞事故的发生。
S2、获取目标车位,并建立泊车坐标系。
参见图4,识别泊车环境数据中的车位信息,确定目标车位,以目标车位的一顶角为原点、以平行于车位长度方向为X轴(如图4中的AB方向)、以平行于车位宽度方向为Y轴(如图4中的OA方向)建立泊车坐标系。
具体地,参见图4,以目标车位的左下角为泊车坐标系的原点O,以平行于车位宽度L方向为X轴,以平行于车位长度W方向为Y轴建立自动泊车坐标系XOY。
S3、根据多段规划策略和目标车位,计算预定义的阶段泊车节点的实际坐标,包括步骤S31~S35:
S31、根据多段规划策略和目标车位,将泊车路线划分为定位路段、第一修正路段、第二修正路段、入库路段;
S32、依据目标车位的车位尺寸、车辆的车身尺寸和预先设置的泊车起点位置,计算出泊车起点坐标(P0的坐标)。
参见图4,本实施例中的车辆标志位为车辆后轴中心点。当车辆标志位与泊车起点P0重合时,车辆标志位与目标车位左侧垂直边沿的水平距离为d
泊车起点P0的预定义计算公式如下:
其中,(x
S33、在泊车起点P0的基础上,计算车辆执行第一控制策略到达定位路段末端时车辆标志位的坐标,作为第一修正路段的起始节点P1的实际坐标。
其中:预定义定位路段的长度S
在本实施例中,第一控制策略为:控制车辆以最小转弯半径、以圆弧轨迹1(即定位路段)向后倒车,如图4中的圆弧1。
因此,可根据距离S0、泊车起点P0以及定位路段的圆弧轨迹1,确定第一修正路段的起始节点P1的实际坐标。
执行第一控制策略的第一约束条件如下:
其中,(x
第一修正路段的起始节点P1实际坐标(x
其中,y
S34、在第一修正路段的起始节点P1的基础上,计算车辆执行第二控制策略到达第一修正路段末端时车辆标志位的坐标,作为第二修正路段的起始节点P2的实际坐标。
其中:预定义第一修正路段的长度为:
在本实施例中,第二控制策略为,控制车辆以最小转弯半径向前行驶,第一修正路段与定位路段轨迹相切,如图4中的圆弧2。
因此,可根据距离S
执行第二控制策略的第二约束条件如下:
其中,y
本实施例设定第一修正路段与定位路段轨迹相切,则是完成第一控制策略、第二控制策略的“前进、后退”,而通过控制车辆以最小转弯半径执行车辆微调,可满足小空间的车辆调整。
S35、在第二修正路段的起始节点P2的基础上,计算车辆执行第三控制策略到达第二修正路段末端时车辆标志位的坐标,作为入库路段的起始节点P3的实际坐标。
在本实施例中,第三控制策略为,控制车辆以最小转弯半径向后倒车,第二修正路段与第一修正路段轨迹相切,如图4中的圆弧3。
其中:预定义第二修正路段的长度为:
因此,可根据距离S
预定义入库路段的起始节点P3的横坐标为:
执行第三控制策略的第三约束条件如下:
其中,x
S36、在入库路段的起始节点P3的基础上,计算车辆执行第四控制策略到达入库路段末端时车辆标志位的坐标,作为入库路段的终点。
在本实施例中,第四控制策略为,控制车辆以直线轨迹向后倒车。
其中:预定义入库路段的长度为:
因此,可根据距离S
预定义入库路段的终点P4的横坐标为:
执行第四控制策略的第四约束条件如下:
本实施例设定包括定位路段、第一修正路段、第二修正路段、入库路段的多段规划策略,设定泊车起点P0,使得车辆进入多段规划策略的统一起点;预设第一控制策略至第四控制策略,控制车辆完成“前进、后退”这一车辆微调,使得车辆满足一次入库要求。
S4、根据每一实际坐标控制车辆依次到达每一阶段泊车节点,完成泊车,具体为:判断定位路段、第一修正路段、第二修正路段、入库路段是否分别满足第一约束条件~第四约束条件,若是则根据每一实际坐标(根据前后点的实际坐标及路段长度)控制车辆从泊车起点P0依次行驶到达每一阶段泊车节点进行泊车,若否则提示泊车路径不安全,结束本次泊车。
具体的:
判断定位路段是否满足第一约束条件。控制车辆以P0(x
判断第一修正路段是否满足第二约束条件。控制车辆以P1(x
判断第二修正路段是否满足第三约束条件。控制车辆以P2(x
判断入库路段是否满足第四约束条件。控制车辆以P3(x
本实施例针对每一阶段的泊车,均设定了对应的约束条件,通过定位路段、第一修正路段、第二修正路段、入库路段是否分别满足第一约束条件~第四约束条件的判断,可预测车辆泊车风险,从而预先提示用户是否可以安全泊车,降低泊车无用功。
本发明实施例在进行泊车之初,预先判断当前泊车空间是否满足垂直倒车入库条件,从而可为用户确定最优的泊车路线;随后根据泊车环境数据确定目标车位,并建立泊车坐标系,使得空间环境数据化;此时,根据预先设计的多段规划策略对泊车路径进行多段式规划,计算预定义的每一泊车阶段中阶段泊车节点的实际坐标,从而通过控制车辆依次到达每一阶段泊车节点,即可完成泊车,设计“后退-前进-后退”的多段式垂直泊车入库,可降低泊车空间需求,提高泊车成功率。
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
- 一种基于垂直车位的自动泊车方法
- 一种基于图神经网络的自动泊车停车位检测方法