维护辅助系统以及维护辅助装置
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及用于辅助设备维护的技术。其中特别涉及设备维护中的路径(路线)的评价。
另外,设备包括机器、设施、工厂、车间等所谓的基础设施。另外,维护包括检修、检查、修理等。
背景技术
近年来,随着人口的减少和超高老龄化,作为经济活动支柱的劳动人口的减少成为社会问题,在以基础设施的检修为代表的设备维护中存在检查员不足的问题。在基础设施的检修中,进行由检查员通过目视来确认所决定的仪表等的作业,根据检查员的熟练度,检修结果有时会出现差异。另外,关于基础设施的检修范围,在大的地方有几千米以上,很多时候关系到检查员的体力负担。
在这样的基础设施的检修中,使用自主行驶型的机器人来替代劳动力的活动变得活跃,由于传感器的廉价化、运算装置的高功能化,正在推进自主移动型的机器人的应用。例如,提出了以下专利文献1所示的技术。
在专利文献1中表示了与提供一种自走式检查装置相关的例子,其中,该自走式检查装置以制造业中的生产设备的检查作业为目的。
为了实施专利文献1所示的技术,需要用于高精度地推定自主检修装置等移动体(车辆)的位置的地图以及记录了检修对象的地图。但是,在使用移动体来制作这些地图时,存在以下课题:花费移动体的运输等所需的劳力以及使用了所构建的移动体的评价等向设施的导入成本。
专利文献
专利文献1:日本特开2015-161577号公报
发明内容
本发明是鉴于上述问题而做出的,其目的在于,通过更简便地评价维护的作业性来辅助维护。
为了解决上述课题,在本发明中,对于包含行驶路径的巡视计划评价包括是否能够进行维护作业在内的作业性。更具体而言,在对使用了移动体的针对设备的维护进行辅助的维护辅助系统中,具备:地图生成部,其生成所述设备的地图;行驶路径生成部201,其生成用于所述维护的移动体的行驶路径;维护对象设定部,其设定沿着所生成的所述行驶路径执行的维护的维护对象;评价部,包括所述行驶路径以及所述维护对象在内,评价是否能够进行遵照维护信息的维护作业,其中,维护信息表示所述移动体的巡视计划;以及维护信息修正部,其根据所述评价的结果来修正所述维护信息。
另外,在本发明中还包括构成维护辅助系统的各装置、其子组合以及使用该装置的方法。并且,用于使维护辅助系统、构成该维护辅助系统的各装置、其子组合作为计算机发挥功能的程序、存储有该程序的存储介质也包含在本发明中。
根据本发明,对于使用了移动体的维护作业,能够更简便地评价其操作性。例如,能够降低维护系统的导入成本。通过以下实施方式的说明,上述以外的课题及效果变得明确。
附图说明
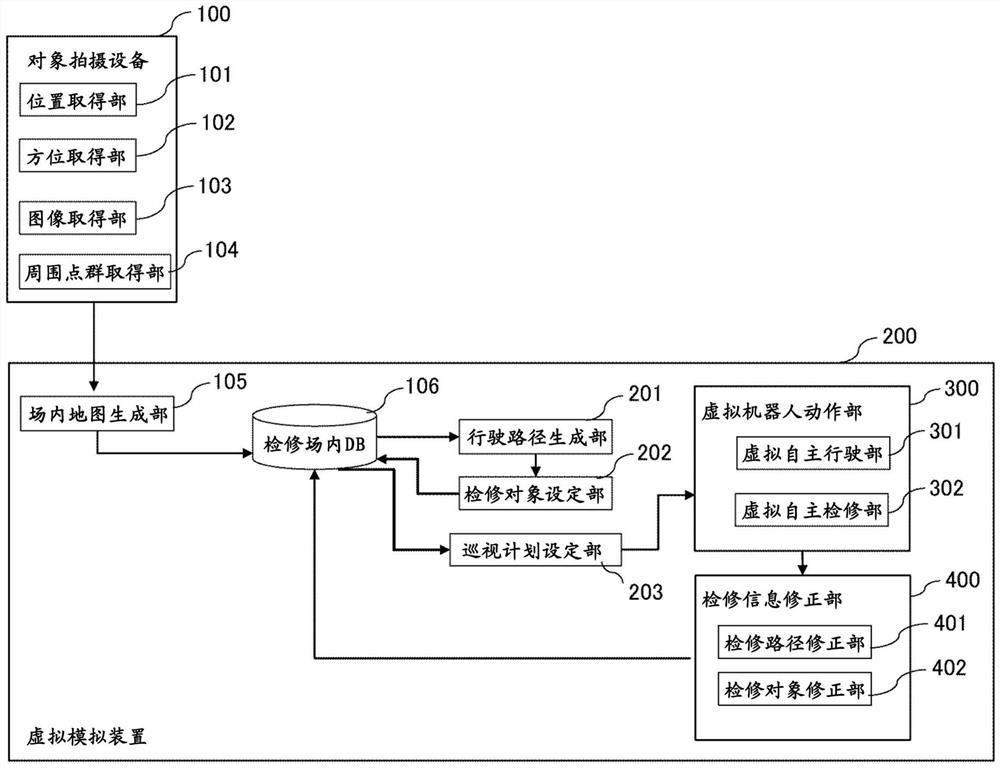
图1是实施例1中的对象拍摄设备以及虚拟模拟装置的功能框图。
图2是实施例1中的虚拟模拟装置的硬件结构图。
图3A示意性地表示实施例1、2中的检修场内DB中存储的检修信息。
图3B表示实施例1、2中的检修场内DB中存储的取得信息和模拟结果。
图4是表示实施例1中的模拟功能的处理流程的流程图。
图5是表示实施例1中的虚拟自主行驶的处理流程的详细内容的流程图。
图6是实施例2中的对象拍摄设备、检修信息管理装置以及自主检修装置600的功能框图。
图7是表示实施例2中的试验行驶功能的处理流程的流程图。
具体实施方式
以下,使用附图对本发明的实施方式进行说明。在本实施方式中,使用作为维护辅助系统的一种的检修辅助系统,对作为维护计划的一种的检修计划进行评价。因此,作为维护,以进行检修的情况为例进行说明。另外,作为进行维护的移动体,以自主检修装置600(机器人)为例进行说明。在本实施方式中,为了方便起见,将进行检修的场所称为“检修场内”。因此,各实施例中的“检修”的用词能够更宽泛地包含“维护”。
在此,在基础设施等设备中,大多被称为遗留设备而长年使用。在这样的设备中,难以自动地收集运转信息来通过中心系统等集中地进行检修。其理由在于,需要构建传感器和网络这样的新的检修系统,在成本、工时方面存在问题。
因此,需要适当地确认已经存在的仪表等检修对象。因此,在本实施方式中,作为机器人的一种的自主检修装置600进行仪表读取等检修。即,在本实施方式中,基于事先通过对象拍摄设备取得的信息,生成作为维护装置的一种的自主检修装置600在检修中所需的地图和检修信息。并且,使用该地图和检修信息来进行自主检修装置600中的虚拟或试验性的检修作业,由此来评价检修计划。以下,对本实施方式的更具体的例子即实施例进行说明。
[实施例1]
在实施例1中,作为检修辅助系统,使用作为维护辅助装置的一种的虚拟模拟装置200。即,基于虚拟模拟装置200的模拟结果来实施与检修计划有关的评价。以下,关于其详细内容,按照结构、信息、处理流程的顺序进行说明。
<结构>
首先,图1是实施例1中的对象拍摄设备100和虚拟模拟装置200的功能框图。
首先,对象拍摄设备100可通过摄像机等实现,具有拍摄功能等取得地图的生成所需的信息的功能。在本实施例中,对象拍摄设备100为了生成在检修中使用的地图而对检修场内进行拍摄。为此,对象拍摄设备100具有位置取得部101、方位取得部102、图像取得部103以及周围点群取得部104。
首先,位置取得部101取得对象拍摄设备100的位置。为此,优选位置取得部101是将GNSS(Global Navigation Satation System全球导航系统)、IMU(Inertial MesurementUnit惯性测量装置)等组合起来,例如以5cm以下的精度推定对象拍摄设备100的位置的传感器。在对象拍摄设备100设置在自主检修装置600的情况下,取得自主检修装置600的位置。
位置取得部101也可以使用图像取得部103、周围点群取得部104中的取得结果,通过SLAM(Simultaneous Localization And Mapping:同时定位与地图构建)来推定对象拍摄设备100或自主检修装置600的位置。在该情况下,表示为相对于绝对坐标中记述的原点位置的相对关系。
另外,方位取得部102取得对象拍摄设备100所朝的方向。为此,作为方位取得部102,能够使用上述的IMU。关于在此使用的IMU,除了FOG(Fiber Optic Gyro光纤陀螺)等输出相对方位的传感器以外,还能够并用如电子罗盘那样能够计算绝对方位的传感器。此外,除了FOG和电子罗盘之外,方位取得部102还可以通过使用加速度传感器来提高精度。
另外,图像取得部103取得对象拍摄设备100周围的图像。为此,图像取得部103能够通过透镜等所谓的光学系统和拍摄元件来实现。特别是,优选图像取得部103能够取得对象拍摄设备100周围360度的图像。可以通过与对象拍摄设备100独立的1台摄像机或能够取得窄角图像的多个摄像机来实现图像取得部103。另外,在此设为取得360度全周的信息,但在本实施例中,图像的取得范围并不限于360度。但是,关于图像取得部103的拍摄方向,与上述的方位取得部102之间的关系性需要是已知的。另外,在使用多个摄像机的情况下,更优选校准各个摄像机彼此的几何关系。
另外,周围点群取得部104取得对象拍摄设备100的周围环境来作为3维点群。即,周围点群取得部104取得多个点群。为此,周围点群取得部104例如可通过使用了光的波长的LIDAR来实现。在该LiDAR中,优选以32条以上的扫描线在水平方向上360度,在垂直方向上±20度左右进行感测的高精度的LiDAR。
能够根据位置取得部101以及方位取得部102的信息来掌握对象拍摄设备100的位置、姿势。并且,通过使用对象拍摄设备100的位置、姿势,能够掌握周围点群取得部104取得的各点群的位置。
以上的位置取得部101、方位取得部102、图像取得部103以及周围点群取得部104可以接收各自独立的位置取得装置、方位取得装置、图像取得装置以及周围点群取得装置所取得的信息,进行数据变换等处理。
并且,对象拍摄设备100具有将各部取得的信息即位置、方位、图像和3维点群交给虚拟模拟装置200的功能。为此,对象拍摄设备100具有用于存储图像等的存储介质的设置功能、与虚拟模拟装置200交换图像等的接口功能。
接着,对虚拟模拟装置200进行说明。虚拟模拟装置200使用以下的地图来生成检修计划,并对该检修计划进行评价,其中,上述地图是基于来自对象拍摄设备100的信息的地图。为此,虚拟模拟装置200具有场内地图生成部105、检修场内DB106、行驶路径生成部201、检修对象设定部202、巡视计划设定部203、虚拟机器人动作部300、检修信息修正部400。虚拟模拟装置200能够通过计算机装置实现,并按照程序来实现这些各部的功能。以下,对虚拟模拟装置200的各构成要素进行说明。
首先,场内地图生成部105基于对象拍摄设备100取得的各种信息,生成检修场内的地图。即,将来自对象拍摄设备100的信息变换为自主检修装置600的自主行驶所需的地图以及检修所需的地图,并保存在检修场内DB106中。该处理可以实时进行,也可以通过将各个信息暂时写出到外部存储装置等来实施离线处理。
然后,检修场内DB106存储这些各种信息和所生成的地图。为此,检修场内DB106可通过所谓的存储器等存储装置来实现。关于在检修场内DB106中保存的信息,使用图3A、图3B在后面叙述。
另外,行驶路径生成部201基于检修场内DB106的地图,生成包罗性地包含检修场内的可行驶部位的行驶路径。在此,优选行驶路径由节点和链路构成。关于该行驶路径,可以是用户一边目视确认一边进行设定的形式,也可以将位置取得部101取得的位置按时间序列排列来设定为节点和链路。
并且,检修对象设定部202根据检修场内DB106的地图,确定检修对象特别是确定其位置。然后,通过行驶路径生成部201或者检修对象设定部202,能够生成包含所确定的检修对象和行驶路径且表示自主检修装置600的巡视计划的检修信息。在此,作为检修对象,例如能够以列表上那样的形式进行设定。此时,可以是用户一边目视确认检修对象22一边进行登记的形式,也可以是登记另外从拍摄对象自动提取功能等提取出的位置的形式。
另外,巡视计划设定部203从检修场内DB106提取表示巡视计划的检修信息,并向后述的虚拟机器人动作部300输出。为此,巡视计划设定部203根据来自用户的输入等确定检修对象,并提取包含该检修对象的检修信息。
巡视计划的生成可以由巡视计划设定部203来执行。在该情况下,巡视计划设定部203从检修场内DB106提取需要检修的检修对象,基于该检修对象来生成自主检修装置600的行驶路径,设定为巡视计划。在该情况下,可以利用所谓的巡回销售员问题那样的组合最优化问题来生成巡视计划。该检修信息存储在检修场内DB106中。在行驶路径的生成中,能够基于检修场内DB106中保存的节点和链路及检修对象的位置信息,通过迪杰斯特拉(Dijkstra)法那样的方法来运算规范路线。
另外,虚拟机器人动作部300进行虚拟的自主行驶以及检修。为此,虚拟机器人动作部300按照生成的行驶路径,虚拟地使自主检修装置600进行检修动作。此时,在虚拟动作中,不仅虚拟地模拟自主行驶,还虚拟地模拟在车间设置的仪表等的检修动作。
为此,具有虚拟自主行驶部301和虚拟自主检修部302。在此,虚拟自主行驶部301通过模拟,使虚拟的自主检修装置按照巡视计划设定部203输出的检修信息的行驶路径来虚拟地行驶。更具体而言,虚拟自主行驶部301运算为了按照行驶路径进行动作所需的针对自主检修装置600的指令值,并向自主检修装置600的机器人模型输入该指令值。然后,虚拟自主行驶部301按照机器人模型运算自主检修装置600的行为,根据其结果来运算表示自主检修装置600移动的位置的行驶轨迹。虚拟自主行驶部301通过反复进行该处理(循环)来实施用于模拟自主行驶的模拟。
另外,虚拟自主检修部302通过模拟来执行针对该检修信息中的检修对象的检修动作。为此,在虚拟自主检修部302中,优选在虚拟自主行驶部301中的行驶时,当到达检修对象时,虚拟地进行摄像机控制,对在模拟环境下设定的仪表进行拍摄。这样,检修动作表示拍摄检修对象。
如上所述,虚拟机器人动作部300通过模拟来虚拟地执行检修作业。然后,虚拟机器人动作部300评价该模拟结果。该评价表示行驶状况、检修状况。更优选地,表示是否能够进行检修作业。更具体而言,表示自主检修装置600是否能够在行驶路径上行驶(运算出的行驶轨迹是否维持行驶路径)、或者是否能够进行检修。另外,在此,能够进行检修包括能够拍摄在检修信息内设置的仪表。然后,虚拟机器人动作部300将该评价的结果输出到后述的检修信息修正部400。这样,虚拟机器人动作部300是基于模拟上的自主检修装置600的位置、其与检修对象/检修场内的位置关系,进行检修评价的评价部的一种。
接着,对检修信息修正部400进行说明。检修信息修正部400根据虚拟机器人动作部300的评价的结果,如果需要,则对巡视计划,即对象的检修信息进行修正。为此,检修信息修正部400具有检修路径修正部401以及检修对象修正部402。首先,在检修路径修正部401中,在虚拟机器人动作部300的评价结果为无法行驶时,修正检修信息中包含的行驶路径的节点以及链路的位置。
另外,检修对象修正部402基于虚拟自主检修部302中的评价结果,对检修对象的位置以及自主检修装置600的位置中的至少一方进行修正,使得能够进行检修。
可以由检修信息修正部400进行虚拟机器人动作部300的评价。例如,检修对象修正部402基于拍摄的结果,输出由虚拟自主检修部302执行的检修结果。然后,用户目视确认该检修结果,在未得到检修结果的情况下,按照来自用户的指示,对检修对象的位置和自主检修装置600的检修中的至少一方进行修正。在未得到检修结果的情况下,例如包含拍摄的结果偏离的情况。
至此结束关于本实施例中的检修辅助系统的功能的说明,接着,说明作为维护辅助装置的一种的虚拟模拟装置200的硬件结构。
图2是本实施例中的虚拟模拟装置200的硬件结构图。如上所述,虚拟模拟装置200能够通过计算机装置实现。因此,虚拟模拟装置200具有处理装置210、输入输出装置220、存储器230以及存储装置1060,它们经由总线那样的通信路径相互连接。
首先,处理装置210能够由CPU等处理器实现,按照存储在存储装置1060中且在存储器230中展开的各程序,执行上述各部的运算。即,执行图1的场内地图生成部105、行驶路径生成部201、检修对象设定部202、巡视计划设定部203、虚拟机器人动作部300、检修信息修正部400的功能。另外,处理装置210也可以通过FPGA(Field-Programmable Gate Array:现场可编程门阵列)、面向特定用途的集成电路即ASIC(Application SpecificIntegrated Circuit:专用集成电路)来实现。
接着,输入输出装置220具有与外部装置连接的功能(接口)。具体而言,与对象拍摄设备100、用户使用的终端装置1000-1、1000-2连接。从对象拍摄设备100接收所取得的各种信息。为此,输入输出装置220可以作为存储介质的插槽来实现。在本实施例中,记载了2台终端装置1000-1、1000-2,但台数并不限于此。并且,优选输入输出装置220构成为能够连接未图示的自主检修装置600。
另外,从终端装置1000-1、1000-2接收来自用户的指示。并且,对终端装置1000-1、1000-2输出评价的结果、拍摄内容等。终端装置1000-1、1000-2能够通过PC、平板电脑、智能手机等来实现。也可以代替终端装置1000-1、1000-2或者作为追加,在虚拟模拟装置200中设置输入装置、输出装置。
此外,存储器230由所谓的ROM、RAM等实现。而且,在存储器230中展开在存储装置1060中存储的以下程序、运算对象的信息。这些程序包含场内地图生成程序1051、行驶路径生成程序2011、检修对象设定程序2021、巡视计划设定程序2031、虚拟机器人动作程序3001和检修信息修正程序4001。在此,各种程序与图1所示的各部具有以下的对应关系。即,执行同样的运算。
场内地图生成部105:场内地图生成程序1051
行驶路径生成部201:行驶路径生成程序2011
检修对象设定部202:检修对象设定程序2021
巡视计划设定部203:巡视计划设定程序2031
虚拟机器人动作部300:虚拟机器人动作程序3001
检修信息修正部400:检修信息修正程序4001。
因此,虚拟机器人动作程序3001可以构成为虚拟自主行驶程序以及虚拟自主检修程序。另外,检修信息修正程序4001可以构成为检修路径修正程序及检修对象修正程序。
另外,存储装置1060对应于图1的检修场内DB106。即,存储装置1060具有存储(保存)信息、上述程序的功能。具体而言,在存储装置1060中,作为信息存储取得信息1061、地图1062、包含评价结果的模拟结果1063以及检修信息1064。另外,存储装置1060能够由硬盘驱动器等存储器来实现。或者,存储装置1060也能够作为DVD等存储介质来实现。到此为止结束本实施例的说明。在以后的说明中,参照图1的各结构进行说明。
<信息>
接着,对本实施例中使用的信息进行说明。首先,在图3A中示意性地表示存储在检修场内DB106的检修信息1064。在此,图3A的检修信息1064以包含地图1062的形式表示,但并不限于此。图3A示意性地表示本实施例中的例子,实际的信息并不限于该形式。本实施例的检修信息1064包含物体20、点群的位置21、检修对象22、铺装道路23、行驶路径24。
但是,检修信息1064只要表示自主检修装置600进行的检修中的巡视路线即可,可以由检修对象22以及行驶路径24构成。在本实施例中,以在场内地图生成部105生成的地图1062中追加检修对象22以及行驶路径24的形式构成检修信息1064。
在此,物体20是存在于检修场内的物体,是设备本身或构成设备的部位。另外,点群的位置21表示由周围点群取得部104取得的点群的位置。另外,铺装道路23表示自主检修装置600能够行驶的铺装道路。在此,铺装道路不需要铺装,只要能够行驶即可。另外,铺装道路23也能够由行人、汽车等在其上行驶。在本实施例中,通过以上构成地图1062。
另外,检修对象22表示由检修对象设定部202基于图像取得部103拍摄到的图像而设定的检修对象。另外,行驶路径24表示由行驶路径生成部201生成的行驶路径。在本实施例中,由这些和地图1062构成检修信息1064。图3A所示的示意图是从整体中截取一部分,实际上在检修场内包罗性地生成包含地图1062的检修信息1064。
接着,使用图3B对取得信息1061和模拟结果1063进行说明。取得信息1061是由对象拍摄设备100取得的信息,如图3B的(a)所示,对于每个检修对象具有位置、方位、图像、点群。位置、方位、图像、点群分别是由位置取得部101、方位取得部102、图像取得部103以及周围点群取得部104分别取得的信息。如上所述,场内地图生成部105使用这些信息来生成地图1062。另外,优选对每个检修场内设置取得信息1061。
并且,图3B的(b)表示模拟结果1063。在本实施例中,针对每个行驶路径(区间)、每个检修对象记录了评价结果即可否拍摄、可否行驶。即,记录虚拟机器人动作部300中的虚拟的检修作业的结果。
在本实施例中,针对每个行驶路径(区间)、每个检修对象记录了评价结果,但记录的单位不限于此。只要确定地图1062上的位置即可。并且,在本实施例中,在模拟结果1063中还记录由检修信息修正部400确定的修正内容,但也可以将它们作为其他信息进行管理。此时,优选由检修路径修正部401进行“检修对象a-检修对象b”那样的行驶路径(区间)的修正,由检修对象修正部402进行“检修对象a”那样的检修对象的修正。并且,检修信息修正部400对检修信息1064执行与该修正内容相对应的修正。
至此结束关于本实施例的信息的说明,接着,对处理流程进行说明。
<处理流程>
以下,对本实施例的处理流程进行说明。图4是表示模拟功能的处理流程的流程图。该模拟功能是通过模拟来执行虚拟的自主检修装置中的检修作业,并对该检修作业进行评价的功能。
首先,行驶路径生成部201确认是否需要更新检修场内DB106(步骤S101)。为此,行驶路径生成部201将是否存在来自对象拍摄设备100的新的取得信息1061或场内地图生成部105生成的地图1062作为判断基准。在此,关于新的取得信息1061和地图1062,优选行驶路径生成部201周期性地确认这些信息的有无。作为结果,在需要更新的情况下(是),转移到步骤S102。另外,在不需要更新的情况下(否),转移到步骤S103。
接着,行驶路径生成部201更新检修场内DB106(步骤S102)。在本实施例中,使行驶路径生成部201执行步骤S101和步骤S102,但也可以通过其他结构来执行。在其他结构中,可以通过图1中未图示的数据库管理部等来进行上述步骤。
接着,行驶路径生成部201生成行驶路径(步骤S103)。为此,如上所述,行驶路径生成部201以节点、链路的形式生成自主检修装置行驶的行驶路径。
接着,检修对象设定部202设定自主检修装置应该检查的检修对象(步骤S104)。然后,巡视计划设定部203从检修场内DB106向虚拟机器人动作部300输出并设定表示巡视计划的检修信息,其中,该巡视计划包含在步骤S103中生成的行驶路径以及在步骤S104中设定的检修对象(步骤S105)。
接着,虚拟机器人动作部300的虚拟自主行驶部301基于在步骤S105中设定的巡视计划,使自主检修装置虚拟地行驶(步骤S106)。另外,使用图5在后面叙述本步骤的详细内容。
然后,虚拟自主行驶部301判断在步骤S106中的虚拟行驶中是否存在无法行驶的行驶路径(区间)(步骤S107)。即,虚拟自主行驶部301评价是否能够进行检修作业中包含的行驶。作为结果,在存在无法行驶的区间时(是),转移到步骤S108。另外,在没有无法行驶的区间时(否),转移到步骤S109。在存在无法行驶的区间时,优选虚拟自主行驶部301按照评价内容来记录检修场内DB106中的模拟结果1063的修正内容。
在步骤S107中,优选根据自主检修装置和检修场内的设备等(物体20等)的位置、它们的位置关系进行评价。即,能够通过自主检修装置与检修场内的设备等是否接触来进行评价。
另外,检修信息修正部400的检修路径修正部401修正在步骤S107中被评价为无法行驶的行驶路径(步骤S108)。此时,优选检修路径修正部401按照模拟结果1063的修正内容进行修正。
另外,虚拟自主检修部302在自主检修装置执行步骤S106时,对到达了检修虚拟检修对象的检修点的情况进行检测。然后,虚拟自主检修部302对检修对象实施虚拟检修(步骤S109)。例如,虚拟自主检修部302执行针对检修对象的虚拟拍摄。
接着,虚拟自主检修部302判断是否存在无法检修的检修对象(步骤S110)。即,虚拟自主检修部302评价是否能够进行检修作业中包含的检修。在本实施例中,使用拍摄来作为检修,使用仪表来作为检修对象。即,在本步骤中,评价是否能够拍摄仪表。为此,在本例中,自主检修装置具有某种拍摄装置,但该拍摄装置可以共用对象拍摄设备100。
作为本步骤的结果,在存在无法拍摄的仪表时(是),转移到步骤S111。另外,在没有无法拍摄的仪表时(否),转移到步骤S112。在存在无法拍摄的仪表时,优选虚拟自主检修部302按照评价内容来记录检修场内DB106中的模拟结果1063的修正内容。
在此,说明步骤S110的评价的具体例。虚拟自主检修部302对拍摄到的图像数据实施图像处理。作为结果,在判断为能够读取仪表的字符、指针等的情况下,虚拟自主检修部302评价为能够拍摄。另外,虚拟自主检修部302也可以将图像数据输出到终端装置1000-1、1000-2,由用户确认该图像数据从而实现上述评价。即,虚拟自主检修部302从终端装置1000-1、1000-2接收用户的确认结果,将其作为评价结果。
在本步骤中,与步骤S107一起,评价是否能够进行作为维护作业的一种的检修作业。
接着,检修信息修正部400的检修对象修正部402对在步骤S110中被评价为无法拍摄的检修对象进行修正(步骤S111)。此时,优选检修对象修正部402按照模拟结果1063的修正内容进行修正。
步骤S106~步骤S111的处理顺序不同。例如,可以集中执行步骤S107以及步骤S109,在此之后进行步骤S107、S108、步骤110、S111。并且,步骤S107、S108与步骤110、S111可以并行地执行处理。
最后,虚拟自主检修部302确认是否对巡视计划的各检修对象进行了拍摄。作为结果,在拍摄了各检修对象的情况下(是),结束本处理流程。在未拍摄各检修对象的情况下(否),转移到步骤S106,反复进行处理。至此结束本实施例的模拟功能的说明,接着,对本处理流程的步骤S106的详细内容进行说明。
图5是表示步骤S106,即实施例中的虚拟自主行驶的处理流程的详细内容的流程图。
首先,虚拟自主行驶部301从检修场内DB106读入检修信息1064中包含的巡视计划的行驶路径(在本流程图中称为基准路径)(步骤S201)。接着,虚拟自主行驶部301以沿着基准路径的方式运算作为控制指令值的行驶指令值(步骤S202)。
接着,虚拟自主行驶部301基于运算出的指令值,输入到事先设定的模型中(步骤S203)。在此,如果是使用转向机构那样的自主检修装置,则关于事先设定的模型,例如能够使用阿克曼模型或平面2轮模型。并且,如果是通过左右电动机的转速进行旋转的自主检修装置,则能够使用差动2轮模型等。
接着,虚拟自主行驶部301基于来自上述模型和自主检修装置的输入,更新自主检修装置的位置(步骤S204)。在此,关于上述模型的参数,通过事先解析自主检修装置而成为已知。至此结束实施例1的说明。
[实施例2]
接着,对实施例2进行说明。在实施例1中,通过模拟进行了虚拟的检修作业,但在本实施例中,试验性地运转自主检修装置600来进行检修作业,根据其结果进行评价。本实施例的信息与实施例1相同。因此,以下,按照结构、处理流程的顺序,以与实施例1的不同点为中心来说明本实施例。
<结构>
图6是本实施例中的对象拍摄设备100、检修信息管理装置500以及自主检修装置600的功能框图。如上所述,在本实施例中,不使用模拟,实际上进行使用了自主检修装置600的评价。因此,在本实施例中,代替虚拟模拟装置200而使用检修信息管理装置500和自主检修装置600。在本实施例中,对于作为维护辅助系统的一种的检修辅助系统,使用检修信息管理装置500以及自主检修装置600。
在此,对象拍摄设备100与实施例1相同,因此省略说明。接下来,检修信息管理装置500从实施例1的虚拟模拟装置200中省略了虚拟机器人动作部300以及检修信息修正部400。因此,检修信息管理装置500在图2所示的虚拟模拟装置200的硬件结构中,能够省略虚拟机器人动作程序3001和检修信息修正程序4001来实现。在本实施例中,也可以使用虚拟模拟装置200来代替检修信息管理装置500。
在此,检修信息管理装置500具有场内地图生成部105、检修场内DB106、行驶路径生成部201、检修对象设定部202以及巡视计划设定部203。它们具有与实施例1相同的功能,因此省略说明。在巡视计划设定部203中,对自主检修装置600输出表示巡视计划的检修信息。
另外,自主检修装置600是机器人的一种,执行检修作业。而且,自主检修装置600具有试验行驶模式启动部601、自主行驶部602、自主检修部603、试验行驶结果发送部604以及检修信息修正部400。在此,检修信息修正部400是与实施例1相同的功能,因此省略说明。
在图6中,限定为用于信息处理的结构来进行记载,具备用于行驶、检修(拍摄)的部位。具有致动器、轮胎等行驶机构、拍摄装置等检修机构。
首先,试验行驶模式启动部601以与实际的检修模式不同的试验行驶模式启动自主检修装置。这优选以来自用户的指定、图7的步骤S105为条件。
另外,自主行驶部602使自主检修装置600按照巡视计划设定部203输出的检修信息的行驶路径在检修场内行驶。为此,自主行驶部602对行驶机构输出行驶指令值。其结果是,自主检修装置600使用行驶机构进行行驶。
另外,自主检修部603使自主检修装置600执行针对检修信息中的检修对象的检修动作。为此,自主检修部603在自主行驶部602行驶时,若到达检修对象,则对自主检修装置600的摄像机等拍摄装置进行摄像机控制。由此,摄像机拍摄作为检修对象的仪表。
然后,自主行驶部602以及自主检修部603与虚拟自主行驶部301以及虚拟自主检修部302同样地进行针对检修作业的评价。即,自主行驶部602评价自主检修装置600是否能够在行驶路径上行驶。另外,自主检修部603评价是否能够读取仪表。这些评价可以通过与实施例1同样的处理来实现。如此,自主行驶部602以及自主检修部603作为评价部发挥功能。
另外,检修信息修正部400与实施例1同样地修正检修信息1064。为此,检修信息修正部400使用试验行驶结果发送部604。即,试验行驶结果发送部604将包含修正内容的修正指示发送至检修信息管理装置500。试验行驶结果发送部604也可以将自主行驶部602、自主检修部603的评价结果发送给检修信息管理装置500。此时,优选检修信息管理装置500使用自身具有的检修信息修正部400来修正检修信息1064。并且,在检修信息管理装置500中,优选基于来自试验行驶结果发送部604的信息,对模拟结果1063进行更新。如此,在本实施例中,能够基于来自试验行驶结果发送部604的发送来更新检修场内DB106。
至此结束本实施例的结构的说明,接着,对本实施例的处理流程进行说明。
<处理流程>
以下,对本实施例的处理流程进行说明。图7是表示试验行驶功能的处理流程的流程图。试验行驶功能是指,在自主检修装置600中作为试验行驶而执行检修作业,并对其进行评价。试验行驶是方便的表达,也可以使用其检修结果。
步骤S101至步骤S105进行与实施例1相同的处理。接着,试验行驶模式启动部601启动试验行驶模式,据此,自主检修装置600进行自主检修行驶(试验检修作业)(步骤S306)。即,自主行驶部602使自主检修装置600按照巡视计划设定部203输出的检修信息的行驶路径在检修场内行驶。另外,自主检修部603使自主检修装置600执行针对检修信息中的检修对象的检修动作。
接着,自主检修装置600评价是否执行了检修作业(步骤S308)。为此,自主行驶部602评价在自主检修行驶中是否存在无法行驶的路径(区间)。另外,自主检修部603评价是否存在无法拍摄的检修对象即仪表。关于这些评价,能够与实施例1的步骤S107、步骤S110同样地进行处理。
作为结果,在无法确认无法行驶的路径(区间)以及无法拍摄的仪表,而能够进行检修作业的情况下(是),转移到步骤S310。另外,在存在无法行驶的路径(区间)或无法拍摄的仪表,无法进行检修作业的情况下(否),转移到步骤S309。
接着,检修信息修正部400根据步骤S308中的评价结果,修正检修场内DB106的内容(步骤S309)。这与实施例1的步骤S108和步骤S111相同。
另外,自主行驶部602根据经由终端装置1000-1、1000-2输入的来自用户的指示,使自主检修装置600向没能进行检修作业的位置移动。然后,当移动到相应的位置时,自主检修部603进行检修,即进行仪表的拍摄(步骤S310)。
最后,与实施例1同样地,确认是否拍摄了巡视计划的各检修对象。作为结果,在拍摄了各检修对象的情况下(是),结束本处理流程。在未拍摄各检修对象的情况下(否),转移到步骤S306,反复进行处理。
在本实施例中,也可以使自主检修装置600伴随用户试验性地进行检修作业。此时,包含用户拿着对象拍摄设备100来拍摄检修对象的情况。至此结束本实施例的说明。
在各实施例中,还包含在修正了检修信息1064之后通过自主检修装置600进行检修的情况。并且,在以上的各实施例中,关于生成地图所需的数据,使用作业员使用专用设备取得的数据来构建基础设施检修所需的地图,由此能够降低自主检修装置的输送等所需的成本,并且使用评价功能来进行行驶评价以及检修评价,基于评价结果并基于自主检修装置的路径以及检修结果来对检修所需的地图进行修正,由此能够降低导入时的成本。
另外,本发明不限于各实施例,还包括各种变形例、应用例。例如,能够用于检修以外的维护、其他巡回问题的解决。
附图标记的说明
100对象拍摄设备、101位置取得部、102方位取得部、103图像取得部、104周围点群取得部、105场内地图生成部、106检修场内DB、200虚拟模拟装置、201行驶路径生成部、202检修对象设定部、203巡视计划设定部、300虚拟机器人动作部、301虚拟自主行驶部、302虚拟自主检修部、400检修信息修正部、401检修路径修正部、402检修对象修正部。
- 基于RFID的漏缆外观维护方法、系统及故障维护辅助终端
- 维护辅助方法、维护辅助系统、维护辅助装置以及计算机程序
- 维护辅助系统、维护辅助装置及维护辅助方法