一种智能杂交水稻父本粉碎机器人
文献发布时间:2023-06-19 10:14:56
技术领域
本发明涉及农业机械,尤其是一种智能杂交水稻父本粉碎机器人。
背景技术
本水稻是我国的主要粮食作物之一。在水稻种植上,我国以杂交稻为主要种植水稻。杂交稻制种生产是一个比较复杂和特殊的种子生产过程。研究表明制种授粉后即割去父本可有效减少母本病虫害损失程度、提高种子千粒重、纯度及色泽度,是一项简单易行的提高制种田生产效率与经济效率的方式。但是适期安全的除去离田,需要克服季节紧、耗工量大、工时长、劳动强度高、劳动力紧缺等问题。目前,我国杂交水稻制种父本采用的是人工割除,费时、费力,效率低,劳动强度大,严重影响到种子的收割进度。随着农村经济的发展,农村劳动力大量向城市转移,从事农业劳动的人口逐渐减少,对采用机械化粉碎水稻父本的农机的需求越来越迫切。
由于杂交水稻制种父本栽插量小,仅仅只有几行,每行约0.5m宽,各行之间间隔布置,在后期需要进行粉碎剔除,保证母本水稻成熟结种且不会对母本水稻造成毁害。
目前市场上常用的收割机体量太大,无法适应作业需求。市场存在多种小型割草机,但多为旱地割草机器,而杂交水稻制种是在水田中进行,旱地割草机器不适用。另外,由于地区差异导致相邻行之间的父本水稻种植宽距存在变化,所以需要使用一种自适应宽距的粉碎机。近些年来,虽然有极少量针对育种田父本粉碎的小型机器的研制,但都是定距的机器。
发明内容
本发明所要解决的技术问题是提供一种智能杂交水稻父本粉碎机器人,能够在水田中进行父本水稻粉碎,能够自行调整切割宽距,并且方便在制种田中进行人机操作。
为解决上述技术问题,本发明所采用的技术方案是:
一种智能杂交水稻父本粉碎机器人,包括移动机构、旋转切割机构;
所述移动机构包括车座,车座下端设有多个车轮组件,每个车轮组件上端与阶梯轴偏轴心连接,每个阶梯轴可转动安装在车座上且与第一从动齿轮连接,多个第一从动齿轮依次啮合后通过第一主动齿轮、第一步进电机传动驱动;
所述旋转切割机构包括旋转机构、抬升机构及切割机构;
所述旋转机构包括槽体,槽体内安装有第五步进电机,第五步进电机输出端通过第五齿轮传送机构驱动回转支撑顶板转动,支撑顶板与支架连接;
所述抬升机构包括第四步进电机,第四步进电机输出端通过连杆传送机构与第二滑座铰接,第二滑座上端铰接在滑块上,滑块固定在支架端头;
所述切割机构包括侧板,侧板固定在第二滑座上,侧板上安装有链传送机构,链传送机构带动多个驱动轴转动;每个驱动轴驱动曲柄滑块机构往复运动,曲柄滑块机构的端头设有刀片,刀片与护刀器配合实现多段切割粉碎。
所述车轮组件为四个,四个两两并排阵列布置。
所述车轮组件包括第二基座,第二基座上端与空心管连接,空心管与阶梯轴连接,第二基座内安装第二步进电机,第二步进电机下端通过联轴器与减震叉连接,减震叉下端安装有车轮。
所述第五齿轮传送机构包括与第五步进电机连接的第五主动齿轮,第五主动齿轮与第五从动齿轮啮合,第五从动齿轮焊接在回转支撑顶板上。
所述连杆传送机构包括第一连杆,第一连杆一端与第四步进电机输出端固定连接、另一端与第二连杆铰接,第二连杆另一端与第二滑座铰接。
所述链传送机构包括安装在三个驱动轴上的传送链轮,其中,中间的驱动轴上为双链轮,其他两驱动轴上为单链轮。上下的传送链轮上饶有滚子链,上端的驱动轴上同轴安装有第三从动齿轮,第三从动齿轮与第三主动齿轮啮合。
所述曲柄滑块机构包括在每个驱动轴端头固定的曲柄,曲柄另一端与摇杆铰接,摇杆另一端与滑座铰接,滑座上固定有刀片。
所述切割机构左右为两组分别布置。
本发明一种智能杂交水稻父本粉碎机器人,具有以下技术效果:
1)、通过采用四个齿轮相互啮合的方式,每个齿轮下端与车轮组件偏心连接,这样仅仅通过一台电机驱动即可调整轮距;利用第二步进电机带动车轮组件旋转,而车轮内带轮毂电机;这样使得移动机构整体具备行距可调、方向可调、四轮可转向、可驱动的优势,提高装置的灵活度,从而适应父本水稻种植宽距在0.5m左右的水稻粉碎。
2)、通过采用链传送机构与曲柄滑块机构的组合,可设计多个切割层,进而完成对父本稻的粉碎处理。
3)、通过采用旋转机构、抬升机构,这样在进行下一垄父本稻粉碎时可避免对周围母本水稻毁害。
4)、通过在支架端头设置第一滑座,两组滑块滑动安装在第一滑座上并通过螺栓锁紧,这样可调整左右切割机构的宽度;而滑块上铰接第二滑座,侧板滑动设置在第二滑座上并通过螺栓锁紧,这样可调整侧板的高度,而侧板上安装有切割机构,继而调整切割机构的高度,使切割机构与父本水稻高度对应。由于每个切割机构对应一行父本水稻,当相邻两行水稻宽度发生变化时,可通过两组滑块靠近或远离进行调节,简单方便。
附图说明
下面结合附图和实施例对本发明作进一步说明:
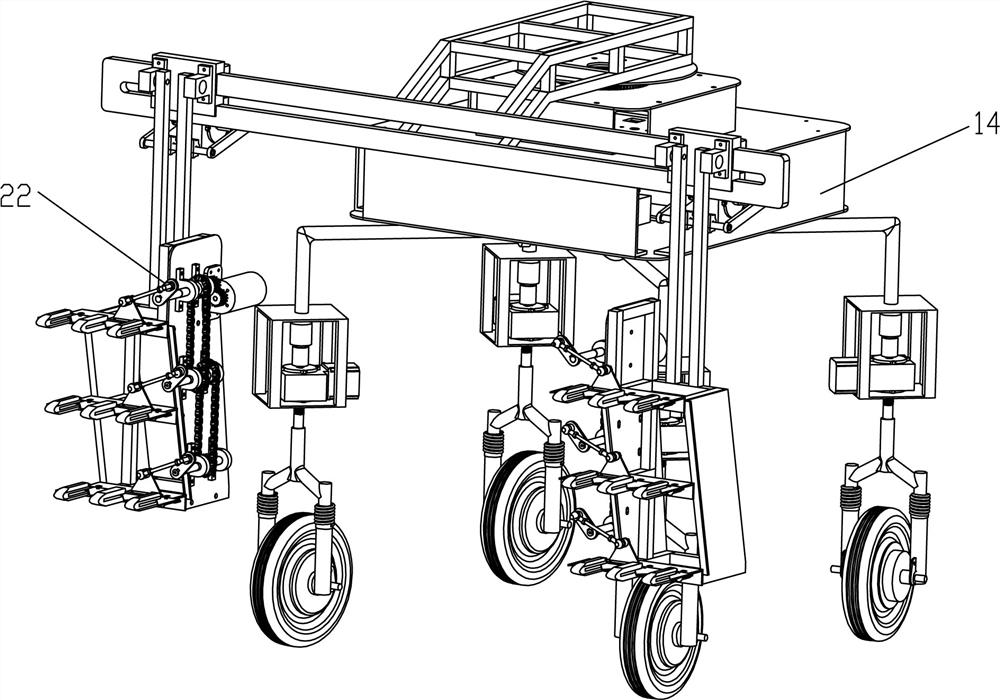
图1为本发明的结构示意图。
图2为本发明的左视图。
图3为本发明中移动机构的结构示意图。
图4为本发明中移动机构的俯视图。
图5为本发明中车轮组件2.1的主视图。
图6为本发明中旋转切割机构的结构示意图。
图7为本发明中抬升机构的主视图。
图8为本发明中切割机构的结构示意图。
图9为本发明中旋转切割机构的局部示意图。
图10为本发明的俯视图。
图11为父本与母本交替布置示意图。
图中:减震叉1,车轮2,车轮组件2.1,联轴器3,第二步进电机4,编码器5,护刀器6,刀片7,滚子链8,第三步进电机9,第三主动齿轮10,连杆11,侧板12,空心管13,移动机构14,车座14.1,横梁15,支架16,回转支撑顶板17,转盘底板18,槽体19,车体上板20,车体下板21,旋转切割机构22,第一从动齿轮23,阶梯轴24,电控箱25,轴承组件26,第一主动齿轮27,第一步进电机28,第二基座29,连杆30,舵盘31,第四步进电机32,双头螺栓33,第五步进电机34,第五从动齿轮35,第五主动齿轮36,父本37,母本38。
具体实施方式
如图1-2所示,一种智能杂交水稻父本粉碎机器人,主要包括移动机构14和旋转切割机构22两部分。其中,移动机构14用于调节车轮距、调节单个车轮行走方向和带动旋转切割机构22行走;旋转切割机构22用于旋转、抬升及切割水稻。
如图3-4所示,移动机构14包括车座14.1,车座14.1内安装有第一步进电机28,第一步进电机28输出轴使用平键连接第一主动齿轮27。第一主动齿轮27与一个第一从动齿轮23啮合,该第一从动齿轮23与其他三个第一从动齿轮23相互啮合。当第一步进电机28转动使第一主动齿轮27转动时,四个第一从动齿轮23相应转动。每个第一从动齿轮23均通过平键固连在一个阶梯轴24上,阶梯轴24通过轴承组件26安装在车座14.1上,阶梯轴24末端与空心管13焊接。每个空心管13又与相应车轮组件2.1安装组成一体。
在不同地区和不同父母本组合时,父本的宽距都不同,当面对父本待粉碎的制种田时,依照父本水稻宽对机器人进行调宽。即启动第一步进电机28,四个阶梯轴24发生转动,四个车轮组件两两相对靠近或远离,即轮距发生改变,实现调整轮距的功能。
如图5所示,车轮组件2.1包括第二基座29,第二基座29上端与空心管13焊接,第二步进电机4通过螺丝固定在第二基座29内。第二步进电机4的输出轴通过联轴器3与减震叉1连接,减震叉1下端安装有车轮2,车轮2内带有轮毂电机,轮毂电机带动车轮2旋转,从而达到行走的目的。在水稻田中行走时,减震叉1对恶劣的行走环境进行减震。
当确定好车体的宽距后,需要对车轮2进行角度控制,第二步进电机4旋转,联轴器3及其下端轮子2均会旋转,当四个轮子均顺时针旋转相同角度时,即可改变车体前进方向,如90度可实现侧走(实现侧走);当四个车轮的方向均和以车中心为圆的切线方向相同时,即可实现车体自转,使车体可以朝任意方向前进或者自转时,直接启动第二步进电机4即可。在第二步进电机4上端安装有编码器5,编码器5通过检测脉冲信号的个数对第二步进电机4的输出角度进行测定,实现精准控制车轮角度。
旋转切割机构22包括旋转机构、抬升机构及切割机构。
如图6所示,旋转机构包括槽体19,槽体19固定在车座14.1上方。槽体19内安装有第五步进电机34,第五步进电机34与第五主动齿轮36用平键连接,第五主动齿轮36与第五从动齿轮35啮合,第五从动齿轮35焊接在回转支撑顶板17上,回转支撑顶板17与支架16螺栓固连。
当第五步进电机34转动时,齿轮传送机构可带动回转支撑顶板17、支架16转动,从而实现旋转切割机构22的旋转。
如图6-7所示,抬升机构包括支架16端头固定的带滑槽的第一滑座16.1,第一滑座16.1上滑动设有两组滑块16.2,每组滑块16.2通过螺栓锁紧在第一滑座16.1上。在每个第一滑座16.1上一侧铰接竖直有第二滑座16.3,侧板12滑动设置在第二滑座16.3上并通过螺栓锁紧。
在对应的支架16外侧固定有第四步进电机32,第四步进电机32的输出轴与舵盘31同轴配合连接。舵盘31中心固定有第一连杆30,第一连杆30与第二连杆30.1铰接,第二连杆30.1另一端与第二滑座16.3铰接,第二滑座16.3上端通过双头螺栓33铰接在滑块16.2上。
当第四步进电机32旋转时,使第一连杆30、第二连杆30.1旋转一定的角度,使连接架30.2旋转,实现旋转切割机构22的功能。
如图8所示,切割机构包括固定在侧板12上面的第三步进电机9,第三步进电机9与第三主动齿轮10同轴连接,另外,在侧板12上还通过轴承组件安装有上、中、下三组驱动轴12.1,每组驱动轴12.1上均安装有传送链轮12.2,其中中间的驱动轴12.1上为双链轮,其他两驱动轴12.1上为单链轮。上下的传送链轮12.2上饶有滚子链8,上端的驱动轴12.1上同轴安装有第三从动齿轮10.1,第三从动齿轮10.1与第三主动齿轮10啮合。当第三步进电机9转动时可带动三组驱动轴12.1同步同向转动。
在每个驱动轴12.1端头固定有曲柄11.1,曲柄11.1另一端与摇杆11.2铰接,摇杆11.2另一端与滑座11.3铰接。曲柄11.1、摇杆11.2及滑座11.3构成曲柄滑块机构11,曲柄滑块机构11的输出端水平固定有刀片7。刀片7滑动设置在护刀器6内,护刀器6分多组间隔固定在侧板12上。在刀片7左右滑动过程中,伸进或伸出护刀器6。
当调整好轮距与车轮角度后,即可前进粉碎父本水稻。即第三步进电机9转动带动与其配合的第三主动齿轮10转动,通过链传送机构传动,将齿轮转动输出到三层割台的驱动轴12.1上,驱动轴12.1驱动曲柄滑块机构11上的刀片7做往返周期运动,进而带动每层割台的刀片7做往复运动,与护刀器6配合实现三层割台多段切割父本水稻的作用,完成父本粉碎功能。
在完成一条父本水稻切割后,需要对下一条父本水稻切割时,需要对旋转切割机构22进行旋转和侧走,其中侧走通过调节上述移动机构14即可实现。但直接旋转该旋转切割机构22会对周围母本水稻毁害,需要先将旋转切割机构22抬升。具体实现如下:启动第四步进电机32,第四步进电机32使连杆30、第二连杆30.1旋转一定的角度,使侧板12绕双头螺栓33逆时针旋转,实现抬升功能。
完成抬升割台动作之后,需要进行旋转割台动作,具体实现如下:启动第五步进电机34,第五步进电机34通过第五从动齿轮35、第五主动齿轮36带动回转支撑顶板17转动,继而使得支架16及其上的相关结构转动。
上述装置中,在车座14.1内安装有电控箱25,电控箱25主要由箱体和电气元器件组成。箱体内有PLC、交流接触器、断路器、热继电器、中间继电器、熔断器和端子排、可充电锂电池,柜体面上有显示面板、旋钮开关、指示灯等。该装置中,所有电机旋转的能量来源电池,所有的控制信号来源遥控器,经无线模块传递至电控箱中,再由电控箱25用于对各个电机进行控制及操作。
另外,电控箱25内还安装有无线通信模块,电控箱25通过无线通信模块与遥控器无线连接;通过遥控器操作各个驱动装置的动作。
工作原理及过程:依据制种田父本水稻宽距调整车体宽距,使用遥控器发出指令信号,控制第一步进电机28转动使阶梯轴24转动进而调整车轮2的间距;控制第二步进电机4转动继而调整车轮角度。调整好后控制车轮2内的轮毂电机及切割机构的第三步进电机9动作进而前进并切割父本水稻,当切完一条垄后,控制第四步进电机32抬升切割机构,后控制第五步进电机34旋转使切割机构旋转;改变车轮角度,车体侧走切割下一条垄。
- 一种智能杂交水稻父本粉碎机器人
- 一种具有粉碎功能的智能家居机器人