一种核燃料芯块水浸密度自动测量机器人末端执行器
文献发布时间:2023-06-19 10:38:35
技术领域
本发明涉及芯块检测技术领域,特别是涉及一种核燃料芯块水浸密度自动测量机器人末端执行器。
背景技术
核燃料芯块为核燃料元件的核心部分,一般为小圆柱块。芯块制成后需要对其各项参数进行检测,以保证质量。对于芯块密度参数的检测,一般采用水水浸法。
水浸密度的测量原理是基于阿基米德定律。流体静力学的一个重要原理,它指出,浸入静止流体中的物体受到一个浮力,其大小等于该物体所排开的流体重量,方向竖直向上并通过所排开流体的形心。阿基米德原理适用于全部或部分浸入静止流体的物体,要求物体下表面必须与流体接触。
根据阿基米德定律,可以推导出基于浸泽芯块方法测量芯块密度的计算公式:
但受限于测量方式和条件,水浸密度的测量较难实现自动化的批量检测,现有水浸密度的测量方法是多人多工位的手工测量,人工将芯块用镊子夹入电子天平的干重称量盘或悬浮重称量盘里,其测量效率低下,无法满足批量生产的芯块的测量需要。同时称量芯块的电子天平精密度高,人工取放芯块必须动作轻柔,否则可能施加过大外力导致超过量程,损坏电子天平。另外人工夹取芯块难以保持恒定的夹持力,易划伤芯块。
发明内容
基于此,有必要针对现有的核燃料芯块水浸密度人工测量无法满足芯块的批量测量需求,易损伤电子天平和划伤芯块的问题,提供一种核燃料芯块水浸密度自动测量机器人末端执行器,实现水浸法对芯块密度的自动化批量检测,同时不会损伤电子天平和划伤芯块。
为了实现上述目的,本发明提供如下技术方案:
一种核燃料芯块水浸密度自动测量机器人末端执行器,包括连接件、伸缩气缸、干芯块抓取机构和湿芯块抓取机构,所述连接件通过联轴器与机器人连接,所述伸缩气缸连接于所述连接件上,所述干芯块抓取机构与所述伸缩气缸的活塞杆连接,所述湿芯块抓取机构与所述连接件连接。
进一步地,所述机器人为四轴机器人。
进一步地,所述干芯块抓取机构包括转接件、干重夹爪气缸和干重夹爪,所述转接件与伸缩气缸的活塞杆连接,所述干重夹爪气缸安置于所述转接件上,所述干重夹爪与所述干重夹爪气缸连接。
进一步地,所述干重夹爪气缸为平行开闭式夹爪气缸。
进一步地,所述干重夹爪包括两个干重夹指,分别与所述干重夹爪气缸连接,所述干重夹指的夹持面上设有夹槽,所述两个干重夹指的夹槽正向相对设置,形成夹持容纳干芯块的夹持空间,所述两个干重夹指平行运动合拢或张开实现对干芯块的夹持或松开。
进一步地,所述湿芯块抓取机构包括连接板、悬浮重夹爪气缸和悬浮重夹爪,所述连接板与连接件连接,所述悬浮重夹爪气缸安置于所述连接板上,所述悬浮重夹爪与悬浮重夹爪气缸连接。
进一步地,所述悬浮重夹爪为悬臂夹爪,包括悬臂和悬浮重夹爪,所述悬臂与悬浮重夹爪气缸连接,所述悬臂末端设置悬浮重夹爪。
进一步地,所述悬浮重夹爪气缸为平行开闭式夹爪气缸。
进一步地,所述悬浮重夹爪包括两个悬浮重夹指,所述悬浮重夹指的夹持面上设有夹槽,所述两个悬浮重夹指的夹槽正向相对设置,形成夹持容纳湿芯块的夹持空间,所述两个悬浮重夹指平行运动合拢或张开实现对湿芯块的夹持或松开。
进一步地,所述夹槽为V型夹槽。
进一步地,所述伸缩气缸、干重夹爪气缸和悬浮重夹爪气缸受气动控制元件控制,当伸缩气缸的活塞杆伸出时干重夹爪气缸展开动作,悬浮重夹爪气缸收回停止;当伸缩气缸的活塞杆缩回时悬浮重夹爪气缸展开动作,干重夹爪气缸收回停止。
进一步地,所述伸缩气缸、干重夹爪气缸和悬浮重夹爪气缸受外部气源独立控制。
进一步地,所述夹持空间的截面大小与待夹持的核燃料芯块的截面大小匹配。
与现有技术相比,本发明的有益技术效果:
本发明提供的核燃料芯块水浸密度自动测量机器人末端执行器,集成度高,自动取放芯块代替人工作业,能够自动抓取芯块分别放入电子天平的干重称量盘或悬浮重称量盘里,并可以从电子天平的干重称量盘或悬浮重称量盘里取出放回原位,可以充分发挥机器人的动作快速、动作精度高的特点,既可以减少检测人员,还可以提高效率;机器人取放芯块,取放动作一致性较好,可以避免损伤电子天平和芯块。
附图说明
图1为核燃料芯块水浸密度自动测量机器人末端执行器连接应用示意图;
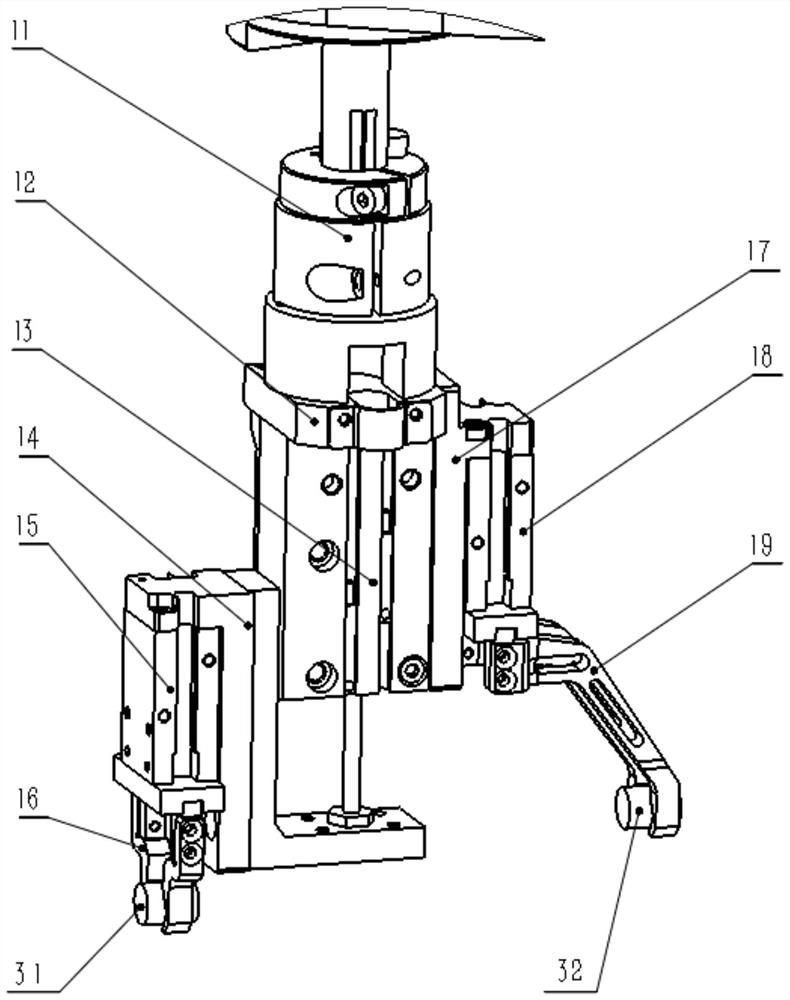
图2为核燃料芯块水浸密度自动测量机器人末端执行器结构示意图;
图3为核燃料芯块水浸密度自动测量机器人末端执行器在干重称量盘位置取放芯块示意图;
图4为核燃料芯块水浸密度自动测量机器人末端执行器在干重称量盘位置取放芯块局部放大图;
图5为核燃料芯块水浸密度自动测量机器人末端执行器在在悬浮重称量盘位置取放芯块示意图;
图6为干重夹指结构示意图;
图7悬浮重夹指结构示意图。
其中:
1、末端执行器;11、联轴器;12、连接板;13、伸缩气缸;14、转接件;15、干重夹爪气缸;16、干重夹爪;17、连接板;18、悬浮重夹爪气缸;19、悬浮重夹爪;2、机器人;31、干芯块;32、湿芯块;4、电子天平;41、干芯块支架;42、干重称量盘;43、湿芯块支架;44、悬浮重称量盘。
具体实施方式
如图1至图3所示,本发明提供一种核燃料芯块水浸密度自动测量机器人末端执行器,实现核燃料芯块水浸密度测量中对核燃料芯块的自动取放,所述末端执行器1包括连接件12、伸缩气缸13、干芯块31抓取机构和湿芯块32抓取机构。
所述连接件12通过联轴器11与机器人2连接固定,机器人2可以采用四轴机器人,四轴机器人的手臂部分可以在一个几何平面内自由移动,可通过四个轴之间的配合到达芯块所在的每一个点位。四轴机器人的前两个关节可以在水平面上左右自由旋转。第三个关节由一个称为羽毛(quill)的金属杆和夹持器组成。该金属杆可以在垂直平面内向上和向下移动或围绕其垂直轴旋转,但不能倾斜。这种独特的设计使四轴机器人具有很强的刚性,从而使它们能够胜任高速和高重复性的工作。在本次应用中,四轴机器人控制所述末端执行器1在较大范围内平面移动和升降移动等动作,高速取放芯块并重复动作。
所述伸缩气缸13固定连接于所述连接件12上,所述干芯块31抓取机构与所述伸缩气缸13的活塞杆固定连接,所述湿芯块32抓取机构与所述伸缩气缸13的缸体连接。所述干芯块31抓取机构包括转接件14、干重夹爪气缸15和干重夹爪16。
所述转接件14与伸缩气缸13的活塞杆连接,所述伸缩气缸13的活塞杆自带导向功能,可以防止活塞杆旋转。
伸缩气缸13的活塞杆和带有滑块的导向板通过螺栓螺母连接,导向板与伸缩气缸13本体上的滑块通过导向板两侧的卡槽限位,顶部螺钉锁紧;滑块的导轨与伸缩气缸13本体通过螺钉连接,活塞杆伸缩时,实现活塞杆的导向功能。
所述干重夹爪气缸15安置于所述转接件14上,所述干重夹爪气缸15为平行开闭式夹爪气缸。
所述干重夹爪16包括两个干重夹指,分别与所述干重夹爪气缸15连接,所述干重夹指与干重夹爪气缸15通过干重夹指的限位槽与螺钉相连接,干重夹指固定于干重夹爪气缸15的末端。所述干重夹指的夹持面上设有V型夹槽,所述两个干重夹指的夹槽正向相对设置,形成夹持容纳干芯块31的夹持空间,所述两个干重夹指平行运动合拢或张开实现对干芯块31的夹持或松开。
干重夹爪16与干重夹爪气缸15安装时,需保证干重夹爪16与干重夹爪气缸15安装部的竖直接触面与水平接触面均良好接触,且在接触面采用螺钉与干重夹爪气缸15安装部连接;安装中要求保证干重夹爪16安装两干重夹指平行度,从而最终保证两干重夹指V型槽口处的夹持空间。
干重夹爪16采用Z字形结构设计,设计时考虑用于与干重夹爪气缸15安装所接触的竖直面与水平的平面度和垂直度要求,同时为了保证安装能贴合到位,需要在干重夹爪16两垂直安装面处设计让位槽,确保气缸安装与夹爪安装时的良好贴合。同时干重夹指的夹持面上设有V型夹槽,所述两个干重夹指的夹槽正向相对设置,形成夹持容纳干芯块31的夹持空间,所述两个干重夹指平行运动合拢或张开实现对干芯块31的夹持或松开。
所述湿芯块32抓取机构包括连接板17、悬浮重夹爪气缸18和悬浮重夹爪19。
所述连接板17与伸缩气缸13无直接连接关系,连接板17通过顶部螺钉与连接件12用螺钉连接。伸缩气缸13通过其连接板与连接件12用螺钉连接,连接板17与伸缩气缸13其连接关系在于均安装于连接件12上。所述悬浮重夹爪气缸18安置于所述连接板17上,所述悬浮重夹爪气缸18为平行开闭式夹爪气缸。
所述悬浮重夹爪19为悬臂夹爪,包括悬臂和悬浮重夹爪19,所述悬臂与悬浮重夹爪气缸18连接,所述悬臂末端设置悬浮重夹爪19。
所述悬浮重夹爪19为悬臂夹爪,其安装面设计有侧面竖直安装面和前面竖直安装面,且两面相互垂直,用于与悬浮重夹爪气缸18连接部位连接时安装定位,并采用螺钉连接固定安装。所述悬浮重夹爪19包括两个悬浮重夹指,所述悬浮重夹指的夹持面上设有V型夹槽,所述两个悬浮重夹指的夹槽正向相对设置,形成夹持容纳湿芯块32的夹持空间,所述两个悬浮重夹指平行运动合拢或张开实现对湿芯块32的夹持或松开。
所述的悬浮重夹爪19其安装面设计有侧面竖直安装面和前面竖直安装面,且两面相互垂直,保证悬浮重夹爪19与悬浮重夹爪气缸18连接时的垂直度要求,从而保证两个悬浮重夹指的平行度,并最终确保形成夹持容纳湿芯块32的夹持空间,以利于有效夹持产品。
所述的悬浮重夹爪19侧面竖直安装面和前面竖直安装面间设计有让位槽,以确保与悬浮重夹爪气缸18安装时能贴合到位。
所述悬浮重夹指与干重夹指的夹持芯块部位结构形式相同,均采用V型槽设计,从而形成夹持空间形式用于夹持所需检测的芯块。同时,由于其两种夹爪夹具体功能上的差异与安装位置的不同,从而导致其安装结构形式和定位面结构采用了完全不同的结构设计形式。
所述的悬浮重夹爪19采用悬臂式设计,配合本方案中整体结构和末端执行器,可以有效避开夹持芯块转运过程中与其它结构发生干涉的情况,同时在放置芯块到称量台时同样可以有效避免干涉,从而保证夹持称量过程的稳定可靠。
所述伸缩气缸13、干重夹爪气缸15和悬浮重夹爪气缸18受气动控制元件控制,当伸缩气缸13的活塞杆伸出时干重夹爪气缸15展开动作,悬浮重夹爪气缸18收回停止;当伸缩气缸13的活塞杆缩回时悬浮重夹爪气缸18展开动作,干重夹爪气缸15收回停止。这里的气动控制元件可以是基于气源本身的启停关联,也可以是在伸缩气缸13、干重夹爪气缸15和悬浮重夹爪气缸18的供气管路上配置二选一阀门,也可以是在伸缩气缸13、干重夹爪气缸15和悬浮重夹爪气缸18的供气管路上配置的受整机控制系统统一调控的电磁阀,其具体安置的结构和形式为现有技术,本发明中对此不再赘述。
本发明中,所述伸缩气缸13、干重夹爪气缸15和悬浮重夹爪气缸18三个气缸独立动作,由电控系统控制电磁阀完成气缸的互锁联动。
所述末端执行器在系统初始状态时,所述伸缩气缸13为常闭缩回状态,所述干重夹爪气缸15和悬浮重夹爪气缸18分别为常开状态。
所述末端执行器在系统需要测量干重芯块时,首先伸缩气缸13伸出,所述末端执行器到达指定芯块位置时,干重夹爪气缸15夹爪缩回,完成夹取动作,由于三个气缸单独作用,因此在干重测量时,悬浮重夹爪气缸18始终保持原始状态。
所述末端执行器在系统需要测量悬浮重芯块时,所述伸缩气缸13为常闭缩回状态,所述干重夹爪气缸15和悬浮重夹爪气缸18分别为常开状态;所述末端执行器到达指定芯块位置时,所述悬浮重夹爪气缸18夹爪缩回,完成夹取动作;同样,由于三个气缸单独作用,因此在悬浮重测量时,干重夹爪气缸15始终保持原始状态。
完成测量后,所述伸缩气缸13、干重夹爪气缸15和悬浮重夹爪气缸18回到初始状态。
所述伸缩气缸13、干重夹爪气缸15和悬浮重夹爪气缸18受外部气源独立控制。
所述外部气源为0.4-0.6MPa的压缩空气,主气管通过气源处理组合,将压缩空气输送至阀岛;所述阀岛由三个两位五通双电控电磁阀组成,所述压缩空气再通过电磁阀分别输送至伸缩气缸13、干重夹爪气缸15和悬浮重夹爪气缸18,所述电磁阀分别单独控制三个气缸;所述气源处理组合配备压力传感器,当输入压缩空气气源压力不足时系统报警提示,暂停所有作业,直至压力恢复,人工确认;当输入压缩空气气源压力过大时,通过气源处理组合的过滤减压阀将气压稳定在正常范围内,保证安全生产。
所述夹持空间的截面大小与待夹持的核燃料芯块的截面大小匹配,一般该空间的截面大小可略小于芯块的截面大小,以便于能够稳定夹持,并能有效减小V型夹槽对核燃料芯块产生的夹持力,避免在核燃料芯块表面留下划痕或破坏了核燃料芯块。
核燃料芯块水浸密度自动测量工作原理:
机器人2与电子天平4通过电控系统与上位机软件进行通讯,当人工按下电子天平4的自动测量按钮后,所述电子天平4进行称重前,自动检测秤盘上有无芯块;若无,则发出信号给上位机,上位机将信号转换发送给机器人2开始取料,取料时气缸等所有动作通过电控系统控制;机器人2此前通过示教,内部存储若干点位,分别有芯块存储位,干重和悬浮重称量位,工作时机器人2逐个进行抓取芯块,放在电子天平4上的干重或悬浮重测量位;并且,在测量前,电子天平4自动检测干重和悬浮重测量位上有无物料,若有,报警提示,若无,继续进行测量。系统称重待数据稳定后,电子天平4发出称完信号给上位机,通过上位机给机器人2发出可抓取信号,机器人2移动至测量上方,电控系统控制气缸完成芯块的抓取动作;完成后移动至此芯块之前所在的点位,每个芯块一一对应,由机器人2控制系统记录原始位置。上述操作直至所有芯块完全测量完成。
核燃料芯块水浸密度自动测量具体步骤:
首先由人工将待检干芯块31摆放在专用样品盘中,伸缩气缸13将活塞杆伸出。
其次,机器人2使用末端执行器1的干重夹指将干芯块31逐个抓取放在电子天平4的干重称量盘42进行称重,待称重数值稳定,系统记录称重数值后,机器人2通过干重夹指将干芯块31抓取放回专用样品盘中原来的位置。直到专用样品盘中干芯块31全部完成称量干重。
之后,待专用样品盘中已经测量的干芯块31被水浸为湿芯块32并浸泡合格后,伸缩气缸13将活塞杆缩回,机器人2使用末端执行器1的悬浮重夹指将湿芯块32逐个抓取放在电子天平4的悬浮重称量盘44进行称重,待称重数值稳定,系统记录悬浮重数值后,机器人2通过悬浮重夹指将湿芯块32抓取放回专用样品盘中原来的位置。直到专用样品盘中湿芯块32全部完成称量悬浮重。
每次称重前电子天平4会自动校零,称量后电子天平4会自动记录测量结果。
将专用样品盘中的芯块全部完成后测量干重或悬浮重后,人工更换下一批继续测量。
假设他人在现有技术方案加装智能相机等视觉系统,加装视觉系统成本较高,虽然对于人工摆放芯块的随意性要求放宽,但是抓取芯块的结构特征没有实质性改变。这样的改变也属于本发明的保护范围。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 一种核燃料芯块水浸密度自动测量机器人末端执行器
- 一种核燃料芯块水浸密度自动测量机器人末端执行器