一种基于标准球的单目测距定位方法
文献发布时间:2023-06-19 11:54:11
技术领域
本发明属于单目测距及机器人手眼标定技术领域,提出一种基于标准球的单目测距定位方法,涉及到空间标定、轮廓提取、位置插值等技术,本发明主要应用于工业机器人,实现机器人对机床工装的精确定位和操作功能。
背景技术
视觉测距相比与其他测距方法具有成本低、适用范围广的优势,具有非常好的发展前景。目前视觉测距往往采用双目测距,基于特征点匹配和小孔成像原理,获取对应特征点的视差,应用三角形原理求取距离。目前商品化的双目相机在特征点提取和匹配的过程中也存在数值错误和缺失的问题,尤其对标准球的检测难以求出正确的形状和距离 。小孔成像用于相机成像原理的定性说明是没有问题的,但是用于精确测量是有问题的。因为实际的相机成像是由复杂的镜头组成像,中心区域已经克服了小孔成像造成的图像畸变。依据小孔成像,只要小球偏离光轴,其成像就会变成橄榄球,偏离光轴越远变形越大,而实际的相机成像只有在小球偏离光轴较大距离时才会发生畸变。
发明内容
本发明的目的在于克服小孔成像的局限,将相机作为一个黑匣子,通过标定建立输入和输出的对应关系。即已知机器人位置,获得小球图像,标定过程输入是机器人位置坐标值以及标准球的物距和光轴夹角,输出是标准小球成像轮廓。标定过程就是建立一非线性的数学模型以及一机器人坐标位置和成像轮廓的个关系数据库。测量时输入是机器人位置加小球成像轮廓,输出标准球在相机坐标系的坐标值以及夹具坐标系和机器人坐标系的关系。发明的最终目的在于为工业机器人提供一种基于单目相机的空间定位系统,借助标准球进行标定,使机器人快速获得标准球的空间位置。尤其是对于移动工作的机器人再次定位,非常有意义。本发明的优势在于相较于传统的单目、双目相机测距有更高的精度,相比激光测距工具成本更低。
为实现上述目的,本发明提供的技术方案包括以下步骤:
步骤1:将单目相机固定在机械臂上,使相机可以与机械臂同步移动,并记录相机在机器人坐标系的相对位置;
步骤2:对相机进行标定,获得相机的内外参数;
步骤3:将机器人用户坐标系原点建在基板小球中心,垂直基板方向为Z方向,向下为y方向;
步骤4:将标准球固定在镜头范围内,控制机械臂,保持镜头方向不变,水平和垂直移动机械臂,在每次移动后拍照采集图像数据;
步骤5:通过标准球色差特征处理图像,提取标准球轮廓,计算出成像轮廓形状参数;
步骤6:使用不同距离基准位置的轮廓数据,求出相机光心轴在机器人坐标系的方向及位置;
步骤7:计算所有位置点相对光轴的夹角以及相机Om距离标准球球心的距离;
步骤8:建立相机距小球距离及光轴夹角与成像轮廓对应数据集,由测量时拍摄的标准球成像轮廓,首先拟合出长轴尺寸与标准球物距及光轴夹角正切值的函数模型;其次检索相邻轮廓,以其对应的位置进行非线性插值,求出测量位的坐标值;
步骤9:手眼标定获取相机坐标系与机器人用户坐标系的变换矩阵;
步骤10:在工作机上安装的夹具加装定位基准板,基准板上安装3个标准球,3个球在该夹具坐标系的位置经过三坐标测量获得;
步骤11:机器人抓取待安装的零件后,移动至有效区域,所安装的相机对工作机夹具拍照;
步骤12:对所获得图像进行处理,提取标准球轮廓。依据标定成像尺寸与物距及光轴夹角的数学模型,可以计算出三个标准球的相机坐标值,依据手眼标定变换矩阵,可以得到三个标准球在机器人坐标系的坐标值;
步骤13:计算机器人坐标系和工作机夹具坐标系的变换关系,得出机器人夹具在工作机夹具坐标系中的位置,实现了机器人对工作机夹具的测距定位,机器人将零件安装至设计位置。
采用上述技术方案所产生的的有益效果在于:
本发明提供的一种基于标准球的视觉标定方法,通过机器人上的相机和工作机夹具上的标准球来实现机器人和工作机的空间关系测量计算,以实现一个机器人在多个工作机间移动的精确定位目的。工业机器人可以精确定位相机在空间的位置,通过大量的精确位置的标准球成像轮廓数据库,就插值出高精度的距离信息。相比于机器视觉的物体识别法以及双面视觉,本方法的结果更加准确,同时可以应用高分辨率的相机以获得更精确的结果。相比于激光测距法,本发明具有更灵活,成本更低,使用更简单的优点。
附图说明
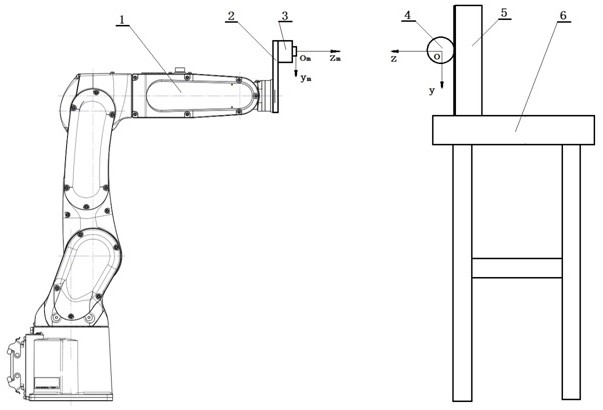
图1是本发明标准球标定示意图。
图2是本发明标准球成像轮廓参数示意图。
图3是本发明标准球成像尺寸与物距及光轴夹角示意图。
图4是本发明标准球标物距与成像尺寸测量数据。
图5是本发明标准球在夹具上的安装示意。
图1中:1机械臂,2 相机支架,3单目相机,4标准球,5基板,6固定台;图2中:C标准球成像中心,r1、r2长轴两个半径,r3、r4短轴两个半径,α为长轴与x轴的夹角;图3中:D 标准球直径,L标准球物距,β光轴夹角,d成像长轴尺寸,r1、r2长轴上两个半径。
具体实施方式
下面结合附图和实施例对本发明进行详细说明。以下实施例用于说明本发明,但不用来限制本发明的范围。本发明的步骤可大致分为两大部分,为标定过程和测量过程,分别对应步骤1-9和步骤10-13 。
步骤1:将单目相机固定在机械臂上,使相机可以与机械臂同步移动,并记录相机在机器人坐标系的相对位置;
因为相机与机械臂末端固定,而机器人可以获取机械臂末端的位置信息,通过机械臂返回的数据即可确定相机在机器人坐标中的位置。
步骤2:对相机进行标定,获得相机的内外参数;
本实例中使用标准棋盘格进行相机标定,采用介于传统的摄影测量标定方法和自标定方法之间张正友标定法。在20个不同位置角度队标准棋盘格进行拍摄,对相片使用特征点算法获取所有角点的位置,获取约束矩阵后使用最大似然估计优化求解,解得相机的内外参数,包括内参矩阵,焦距,畸变矩阵,旋转矩阵。
步骤3:将机器人用户坐标系原点建在基板小球中心,垂直基板方向为Z方向,向下为y方向;
在本实例标定过程中,在垂直的基板上固定一个标准球,采用辨识度较高的颜色。标准球的球心位置被视为目标坐标原点。目标坐标系与机器人坐标系的相对位置固定,与相机坐标系的位置随机械臂运动而变化。可以通过矩阵运算得出相机在目标坐标系中的位置。
步骤4:将标准球固定在镜头范围内,控制机械臂,保持镜头方向不变,水平和垂直移动机械臂,在每次移动定位后拍照采集图像数据,获得机器人位置和标准球成像数据集;
在本案例中,具体实施方式为在小球于基板Z方向开始拍摄。在Z=10cm平面上拍摄9张照片,分别为中心点,以及从x=0cm, y=10cm开始,每隔45°拍摄一张,拍摄一圈8张。在Z=20cm平面上拍摄17张,即中心点1张,距离中心点半径10cm共8张,距离20cm共8张。同理在Z=30cm平面拍摄25张。在采集过程中,相机光轴始终垂直于基座平面,整个采集过程共收集50张图像。
步骤5:通过标准球色差特征处理图像,提取标准球轮廓,计算出成像轮廓形状参数;
对图像颜色进行分析,根据每个像素rgb的比例来区分标准球的位置。将图像中标准球颜色的rgb方向上的像素全部置为白色,其他像素置为黑色,得到一张二值化图像。图像中只有一个小球,为防止颜色异常,选取二值化图像中最大的白色区域,对其外部轮廓进行凸包处理,确保结果是一个近似椭圆。在普通相机的成像结果中,一个球体的成像结果为一个偏椭圆。其中椭圆长轴指向相机光心,短轴垂直于长轴。长轴和短轴相交,互相切分为4个线段。这4个线段长和他们的交点即本案例中需要获取的偏椭圆信息,分别命名为r1,r2, r3, r4以及交点在相片中的位置(X,Y)如图2所示,获得数据集信息表如表1所示。
表1.标定数据集
步骤6:使用不同距离基准位置的轮廓圆数据,求出相机光心位置在z平面上的方向及距离;
在相机标定的过程中,可以获取相机光轴在照片中的像素位置。根据提取的偏椭圆轮廓,以及r1,r2, r3, r4, (X,Y)信息,可以计算出椭圆中交点到光心的像素距离以及其与图像上长轴夹角α,即可确定光轴矢量。
步骤7:测量所有位置点相对光轴的夹角以及相机小孔距离标准球球心的距离;
根据拍摄时相机所在基板坐标系Z轴的高度和半径长度,可以通过三角函数计算出所有位置点相对光轴的夹角以及相机小孔距离标准球球心的距离,以及相机光心在基座平面上的交点和相对y轴的角度。将所有收集到的信息以及图像保存到数据库表格中。
步骤8:建立相机距小球距离及光轴夹角与成像轮廓对应数据集,由测量时拍摄的标准球成像轮廓,首先拟合出长轴尺寸与标准球物距及光轴夹角正切值的函数模型 ; 在本案例中,根据实验可得,相机光心与小球中心的距离L,光夹角为β,成像尺寸d=r1+r2与L及a=tan(β) 基本符合二元三次多项式拟合函数。图4所示,当标准球在光轴上即β=0时,标准球成像尺寸d与物距L实验数据及拟合数据图。
步骤9:标定获取相机坐标系与机器人用户坐标系的变换矩阵;
相机固定在机械臂上,测量相机与机械臂末端的位置关系。通过工业机器人的数据接口可以获得机械臂末端在机器人坐标系中的位置和角度,进而获得相机在机器人坐标系的位置和角度。通过位置和角度信息可以计算坐标系转换矩阵。
步骤10:在工作机上安装的夹具加装定位基准板,基准板上安装3个标准球。标准球选择和工作环境对比较大的颜色,3 个球在该夹具坐标系的位置经过三坐标测量获得;
步骤11:机器人抓取待安装的零件后,移动至有效区域,所安装的相机对工作机夹具拍照;
取可见范围8个以上位置进行拍照采集,为后续最小二乘法求夹具坐标系和机器人坐标系转换矩阵提供足够的数据。
步骤12:对所获得图像进行处理,提取标准球轮廓。依据标定成像尺寸与物距及光轴夹角的数学模型,可以计算出三个标准球的相机坐标值,依据手眼标定变换矩阵,可以得到三个标准球在机器人坐标系的坐标值;
同第5步对包含三个标准球的夹具图像进行处理并计算成像轮廓参数,依据标定成像尺寸与物距及光轴夹角的数学模型,计算出三个标准球的相机坐标值。
步骤13:计算机器人坐标系和工作机夹具坐标系的变换关系,得出机器人夹具在工作机夹具坐标系中的位置,实现了机器人对工作机夹具的测距定位,机器人将零件安装至设计位置;
设机器人和夹具坐标系转换矩阵为
夹具标准球在机器人坐标系和夹具坐标系数值关系为
应用步骤12得到的8个位置三个球的机器人坐标值以及三个球的夹具坐标值,可建立共24个偏差,偏差平方和最小,则建立最小二乘法求出变换矩阵系数。得出机器人夹具在工作机夹具坐标系中的位置,实现了机器人对工作机夹具的测距定位。
- 一种基于标准球的单目测距定位方法
- 基于单目相机的测距方法及测距系统