一种果品夹持翻转装置
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及一种果品夹持翻转装置,属于果品检测夹装装置技术领域。
背景技术
目前,果品装箱前,需要对果品进行质量检测,由于果品需要放置在果品托盘50上检测,苹果与托盘相接触的位置形成检测盲区。目前,多通过人工将果品翻转一下,使检测盲区朝上,然后将果品重新放置于果品托盘50上,从而对果品进行全面检测。人工操作存在效率低、增加生产成本、出错率高、易对果品造成损伤等缺点。
发明内容
本发明的目的在于解决上述现有技术存在的不足之处,提供一种结构简洁,自动化程度高,能夹持住果品,对果品进行180°翻转,并且能将翻转后的苹果自动夹装放置于果品托盘上的果品夹持翻转装置。
为实现上述目的,本发明提供如下技术方案:
一种果品夹持翻转装置,其特殊之处在于包括用于传送果品托盘的托盘传送装置,托盘传送装置上方安装有升降支撑框架,升降支撑架上安装有用于抓取果品的上抓取机构,上抓取机构由多个上抓取单元构成,每个上抓取单元均包括升降气缸及由升降气缸驱动升降的上夹爪机构,上抓取机构附近设有用于抓取果品并对果品进行180°翻转的果品翻转机构;
优选的,所述上夹爪机构包括与升降气缸相连接的两个相平行的安装板,安装板下表面安装有多个气缸固定板,每个气缸固定板上均安装有上夹爪气缸,上夹爪气缸从两个安装板之间的空隙穿过,上夹爪气缸的气缸杆延伸至气缸固定板下方,沿着气缸固定板下表面长度方向安装有两个等长的轨道,两个轨道相间隔,气缸杆从两个轨道之间穿过,轨道上安装有能沿着轨道长度方向滑动的滑块机构,滑块机构连接有垂直向下延伸的上夹爪,气缸杆端部安装于铰接件上,铰接件两端分别安装于左右两个上夹爪上,气缸杆上下驱动铰接件展开或收拢,从而带动两个上夹爪相互靠近或远离;
优选的,所述上夹爪呈长方形板状,上夹爪靠下位置处安装有用于保护果品的硅胶片;
优选的,所述滑块机构包括安装于轨道上的上滑块,上滑块下表面安装有上夹爪连接板,通过上夹爪连接板连接上夹爪;
优选的,所述铰接件包括与气缸杆相连接的H型件,H型件左右两端均铰接一个水平连杆,两个上夹爪的相同位置处均安装有U型件,水平连杆一端与U型件相铰接;
优选的,所述上夹爪气缸通过安装板固定于气缸固定板上。
优选的,所述果品翻转机构包括安装于抓取连接型材上的下夹爪机构,抓取连接型材通过翻转电机及减速机驱动转动,下夹爪机构包括下压板及设于下压板下方的多个下夹爪本体,下压板位于抓取连接型材上方,下夹爪本体位于抓取连接型材下方,每个下压板上均安装一个用于驱动下压板升降的下压气缸,下压气缸安装于抓取连接型材上,下夹爪本体包括安装于抓取连接型材上的夹爪基座固定板,夹爪基座固定板下表面安装有四个相间隔的夹爪基座,两个上夹爪从夹爪基座之间的间隙穿过,四个夹爪基座底部均铰接一个下夹爪件,夹爪基座固定板中心位置处开设有通过孔,通过孔内插装有用于推动四个下夹爪件展开或收拢的下压杆,下压杆顶部安装于下压板上,四个下夹爪件附近设有四个复位弹簧,复位弹簧一端固定于夹爪基座固定板上、另一端安装于下夹爪机构上,夹爪基座固定板上还安装有用于承托果品的果品下落承接机构;
优选的,所述下夹爪件包括弧形夹爪及固定于弧形夹爪顶部的一字型夹杆,一字型夹杆一端与夹爪基座相铰接、另一端向中心方向延伸,一字型夹杆与夹爪基座铰接后呈L型;
优选的,所述果品下落承接机构包括两个靠近下压杆的承接板,两个承接板位于下压杆两侧,两个承接板长度方向两端均设有折弯面,其中一个折弯面安装于夹爪基座固定板上,另一个折弯面用于承接果品;
优选的,所述夹爪基座固定板上开设有用于穿过直线轴承的直线轴承通过孔;
优选的,所述翻转电机安装于翻转电机连接板上,翻转电机输出端与减速机相连接,减速机输出端驱动抓取连接型材转动,抓取连接型材一端与减速机联动、另一端通过轴承安装于末端板上,末端板与翻转电机连接板之间还安装有法兰连接型材;
优选的,所述法兰连接型材通过连接型材与机器人相连接。
本发明的果品夹持翻转装置结构设计巧妙,通过翻转电机及减速机驱动抓取连接型材翻转,从而实现下夹爪机构的上下翻转。通过下夹爪机构抓取果品,工作时,下压气缸驱动下压板下移,下压板驱动下压杆下移,下压杆推动四个下夹爪件的一字型夹杆一端同时下移,从而使弧形夹爪张开,若下压杆上移,下压杆脱离一字型夹杆,一字型夹杆在复位弹簧的作用下复位,实现果品抓取。果品抓取后,通过翻转电机及减速机驱动抓取连接型材进行180°翻转,果品落至果品下落承接机构上,能较好的保护果品,此时,上夹爪机构然后通过升降气缸驱动升降至适宜位置,然后通过上夹爪机构夹持住下夹爪机构上的果品,下夹爪机构松开夹持,通过上夹爪机构夹持果品,将果品送至果品托盘上,通过检测机构对托盘上的果品进行质量检测。综上所述,本发明自动化程度高,夹持效果好,能对对果品进行180°翻转,并且能将翻转后的苹果自动夹装于果品托盘上,完成果品全面检测,大大降低企业生产成本。
附图说明
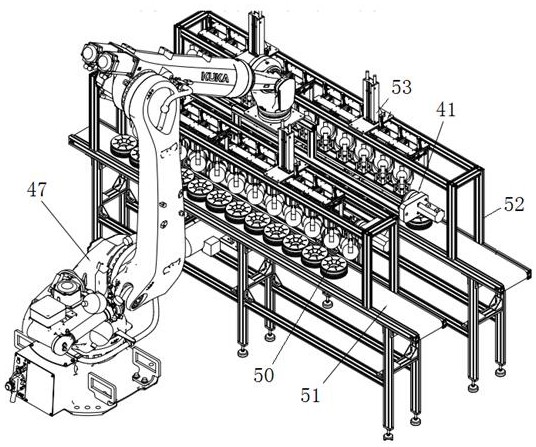
图1是本发明一种果品夹持翻转装置的结构示意图;
图2是托盘传送装置与升降支撑框架的布局图;
图3是上抓取单元与下夹爪机构配合的结构示意图;
图4是上夹爪机构的结构示意图;
图5是上夹爪张开状态图;
图6是上夹爪夹持状态图;
图7是下夹爪机构结构示意图;
图8是下夹爪本体的结构示意图;
图9是下夹爪本体翻转180°后的结构示意图;
图10是果品下落承接结构承接果品时的结构示意图;
图11是的法兰连接型材与抓取连接型材的结构示意图;
图12是法兰连接型材与机器人的连接关系图;
图中:1、气缸固定板;2、上夹爪气缸;3、轨道;4、气缸杆;5、上夹爪;6、硅胶片;7、上滑块;8、上夹爪连接板;9、H型件;10、水平连杆;11、U型件;12、安装板;20、直线轴承通过孔;21、夹爪基座固定板;22、夹爪基座;23、通过孔;24、下压杆;25、下压板;26、下压气缸;27、弧形夹爪;28、一字型夹杆;29、承接板;30、折弯面;31、复位弹簧;32、安装板;33、上夹爪机构;34、下夹爪机构;40、翻转电机;41、减速机;42、抓取连接型材;43、末端板;44、翻转电机连接板;45、法兰连接型材;46、连接型材;47、机器人;50、果品托盘;51、托盘传送装置;52、升降支撑框架;53、升降气缸。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1
本实施例的果品夹持翻转装置,请参阅图1-图12,包括用于传送果品托盘50的托盘传送装置51,托盘传送装置51上方安装有升降支撑框架52,升降支撑架52上安装有用于抓取果品的上抓取机构,上抓取机构由多个上抓取单元构成,每个上抓取单元均包括升降气缸53及由升降气缸53驱动升降的上夹爪机构,上抓取机构附近设有用于抓取果品并对果品进行180°翻转的果品翻转机构;
上夹爪机构的具体结构:上夹爪机构包括与升降气缸53相连接的两个相平行的安装板32,安装板32下表面安装有多个气缸固定板1,每个气缸固定板1上均安装有上夹爪气缸2,上夹爪气缸2从两个安装板32之间的空隙穿过,上夹爪气缸2的气缸杆4延伸至气缸固定板1下方,沿着气缸固定板1下表面长度方向安装有两个等长的轨道3,两个轨道3相间隔,气缸杆4从两个轨道3之间穿过,轨道3上安装有能沿着轨道3长度方向滑动的滑块机构,滑块机构连接有垂直向下延伸的上夹爪5,气缸杆4端部安装于铰接件上,铰接件两端分别安装于左右两个上夹爪5上,气缸杆4上下驱动铰接件展开或收拢,从而带动两个上夹爪5相互靠近或远离;上夹爪5呈长方形板状,上夹爪5靠下位置处安装有用于保护果品的硅胶片6;滑块机构包括安装于轨道3上的上滑块7,上滑块7下表面安装有上夹爪连接板8,通过上夹爪连接板8连接上夹爪5;铰接件包括与气缸杆4相连接的H型件9,H型件左右两端均铰接一个水平连杆10,两个上夹爪5的相同位置处均安装有U型件11,水平连杆10一端与U型件11相铰接;上夹爪气缸2通过安装板12固定于气缸固定板1上。
果品翻转机构的具体结构:果品翻转机构包括安装于抓取连接型材42上的下夹爪机构,抓取连接型材通过翻转电机40及减速机41驱动转动,下夹爪机构包括下压板25及设于下压板25下方的多个下夹爪本体,下压板25位于抓取连接型材42上方,下夹爪本体位于抓取连接型材42下方,每个下压板25上均安装一个用于驱动下压板25升降的下压气缸26,下压气缸26安装于抓取连接型材42上,下夹爪本体包括安装于抓取连接型材42上的夹爪基座固定板21,夹爪基座固定板21下表面安装有四个相间隔的夹爪基座22,两个上夹爪5从夹爪基座22之间的间隙穿过,四个夹爪基座22底部均铰接一个下夹爪件,夹爪基座固定板21中心位置处开设有通过孔23,通过孔23内插装有用于推动四个下夹爪件展开或收拢的下压杆24,下压杆24顶部安装于下压板25上,四个下夹爪件附近设有四个复位弹簧31,复位弹簧31一端固定于夹爪基座固定板21上、另一端安装于下夹爪机构上,夹爪基座固定板21上还安装有用于承托果品的果品下落承接机构。下夹爪件包括弧形夹爪27及固定于弧形夹爪27顶部的一字型夹杆28,一字型夹杆28一端与夹爪基座22相铰接、另一端向中心方向延伸,一字型夹杆28与夹爪基座22铰接后呈L型。果品下落承接机构包括两个靠近下压杆24的承接板29,两个承接板29位于下压杆24两侧,两个承接板29长度方向两端均设有折弯面30,其中一个折弯面30安装于夹爪基座固定板21上,另一个折弯面30用于承接果品;
夹爪基座固定板21上开设有用于穿过直线轴承的直线轴承通过孔20;翻转电机40安装于翻转电机连接板44上,翻转电机40输出端与减速机41相连接,减速机41输出端驱动抓取连接型材42转动,抓取连接型材42一端与减速机41联动、另一端通过轴承安装于末端板43上,末端板43与翻转电机连接板44之间还安装有法兰连接型材45;法兰连接型材45通过连接型材46与机器人47相连接。
工作原理:工作时,通过机器人47将抓取连接型材42移动到果品托盘50上方,通过下夹爪机构夹爪果品后,通过翻转电机40及减速器41驱动抓取连接型材42翻转180°,通过机器人47将下夹爪机构移动至上夹爪机构正下方,上夹爪机构通过升降气缸驱动升降至适宜位置,然后通过上夹爪机构夹持住下夹爪机构上的果品,下夹爪机构松开夹持,通过外部机器人将下夹爪机构移动至其它位置,通过上夹爪机构夹持果品,将果品重新送至果品托盘50上,通过检测机构对托盘上的果品进行质量检测。
上夹爪机构的工作原理:通过上夹爪气缸2驱动气缸杆4上下移动,气缸杆4向下移动时,气缸杆4驱动H型件9向下移动,与H型件9相铰接的两个水平连杆10相互间由一字型布局逐渐变成V型布局,从而拉动两个上夹爪5相互靠拢,实现果品抓取,通过硅胶片6能防止果品抓取过程中受损,气缸杆4向上移动时,两个与H型件9相铰接的两个水平连杆10相互间由V型布局逐渐变成一字型布局,从而使两个上夹爪5相互远离。
下夹爪机构的工作原理:通过下压气缸26驱动下压板25下移,下压板25驱动下压杆24下移,下压杆24推动四个下夹爪件的一字型夹杆28一端同时下移,从而使弧形夹爪27张开,若下压杆24上移,下压杆24脱离一字型夹杆28,一字型夹杆28在复位弹簧31的作用下复位,实现果品抓取。果品抓取后,通过外部翻转装置实现下夹爪机构的180°翻转,果品落至果品下落承接机构上,能较好的保护果品。
能较好的保护果品。综上所述,本发明自动化程度高,夹持效果好,工作效率高,能夹持住果品,对果品进行180°翻转。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种果品夹持翻转装置
- 一种果品翻转装置