拆包机及其控制方法、物料预处理系统及其控制方法
文献发布时间:2023-06-19 13:48:08
技术领域
本发明属于破碎机领域,具体涉及一种拆包机及其控制方法、物料预处理系统及其控制方法。
背景技术
随着我国环保事业的蓬勃发展,国内对于环保相关的设备需求也越来越大,其中,破碎机作为环保核心设备更是需求量剧增。但是,破碎机运转并不是独立进行的,对于进入破碎机中的物料,例如秸秆、碎布等等,都需要进行一些预处理之后才能投入破碎机中。其中最终关键的一步便是需要拆解物料包的包网,以便物料能够通过传输装置传输到破碎机中。但是,目前市面上拆解物料包包网的手段主要是依赖于人工,这样便需要投入大量的人力到拆包工作中,以避免浪费破碎机的产能,另一方面,采用人工拆包和推送,存在较大的安全风险,容易引发工伤事故。
发明内容
本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种拆包机,解决了物料包拆包需要依赖于人工的问题。本发明还提出了一种拆包机控制方法、一种物料预处理系统和一种物料预处理系统控制方法。
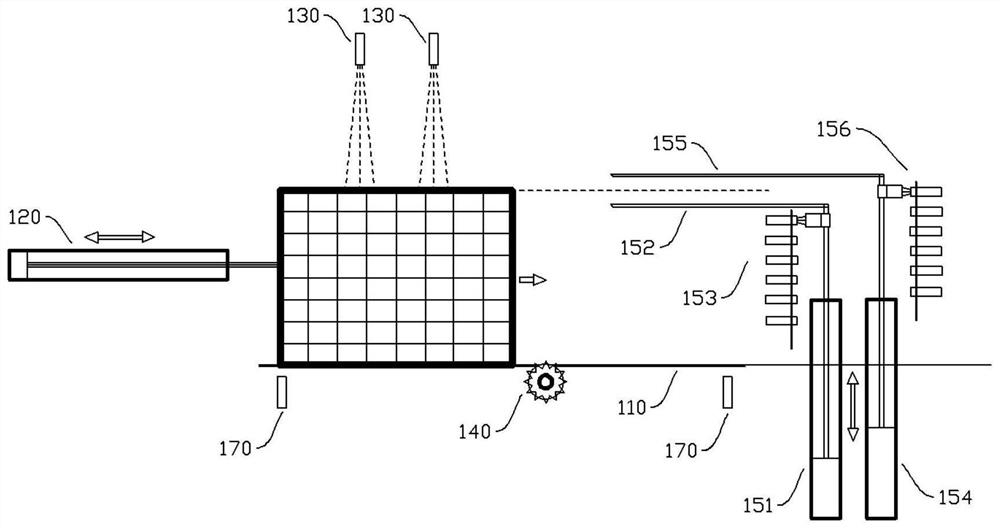
根据本发明第一方面实施例的拆包机,包括:
物料传输平台;
推料装置,用于推动物料包在所述物料传输平台上前移;
料包高度检测单元,用于检测所述物料包的高度;
破网装置,设置于所述物料传输平台中,用于破开所述物料包的包网;
包网夹持装置,其具备可调节高度的伸缩夹持端,用于夹持所述物料包的包网;
第一控制单元,分别与所述推料装置、料包高度检测单元、破网装置和包网夹持装置电性连接。
根据本发明实施例的拆包机,至少具有如下技术效果:通过推料装置可以实现对物料包的自动推进,取消人工参与推料过程,料包高度检测单元可以检测物料包的高度,从而可以便于调整包网夹持装置的夹持高度,通过破网装置可以将物料包的包网破网,让物料和包网可以分离,从而使得包网夹持装置可以夹取出包网,最终完成对物料包的自动拆解过程。本发明实施例的拆包机相较于传统的拆解方式而言,无需人工参与拆包过程,极大的提高了拆包的速度,提高了人员的安全性,减少了拆包人员的投入,适合进行规模化推广和使用。
根据本发明的一些实施例,所述料包高度检测单元包括:
测距支架,设置于所述物料传输平台上;
激光测距传感器,与所述第一控制单元电性连接并设置于所述测距支架上。
根据本发明的一些实施例,所述料包高度检测单元有多个。
根据本发明的一些实施例,所述破网装置包括与所述第一控制单元电性连接的锯片电机、以及设置于所述锯片电机输出轴上的锯片。
根据本发明的一些实施例,所述包网夹持装置包括:
第一升降机构,其具有第一升降端;
第一驱动机构,与所述第一控制单元电性连接,用于驱动所述第一升降端进行升降;
第一夹持部,与所述第一升降端连接,用于夹持所述物料包的包网;
第一高度定位单元,与所述第一控制单元电性连接,用于反馈所述第一夹持部的高度。
根据本发明的一些实施例,所述第一高度定位单元包括:
多个皆与所述第一控制单元电性连接的第一高度检测开关单元,多个所述第一高度检测开关单元延所述第一升降端的升降方向间隔设置;
第一感应部件,设置于所述第一升降端上,用于触发所述第一高度检测开关单元。
根据本发明的一些实施例,所述包网夹持装置还包括:
第二升降机构,其具有第二升降端;
第二驱动机构,与所述第一控制单元电性连接,用于驱动所述第二升降端进行升降;
第二夹持部,与所述第二升降端连接,所述第二夹持部与所述第一夹持部共同用于夹持所述物料包的包网;所述第二夹持部与所述第一夹持部存在高度差;
第二高度定位单元,与所述第一控制单元电性连接,用于反馈所述第二夹持部的高度。
根据本发明的一些实施例,所述第二高度定位单元包括:
多个皆与所述第一控制单元电性连接的第二高度检测开关单元,多个所述第二高度检测开关单元延所述第二升降端的升降方向间隔设置;
第二感应部件,设置于所述第二升降端上,用于触发所述第二高度检测开关单元。
根据本发明的一些实施例,所述第二夹持部与所述第一夹持部皆为杆状结构。
根据本发明的一些实施例,上述拆包机还包括与所述第一控制单元电性连接的料包位置检测单元,所述料包位置检测单元用于检测所述物料包在所述物料传输平台上的位置。
根据本发明的一些实施例,所述料包位置检测单元包括皆与所述第一控制单元电性连接的两个位置检测开关,两个所述位置检测开关共同用于检测所述物料包在所述物料传输平台上的前进状态。
根据本发明第二方面实施例的拆包机控制方法,应用于如上述的拆包机,所述拆包机控制方法包括以下步骤:
控制所述推料装置将物料包朝物料传输平台中排料门方向推移;
接收所述料包高度检测单元采集的高度数据;
根据所述高度数据确认所述物料包的高度信息;
根据所述高度信息调整包网夹持装置的伸缩夹持端的高度;
通过破网装置破开所述物料包的包网;
持续控制所述推料装置推动所述物料包,直至所述物料包中的物料和包网分离,其中,所述物料包的包网被所述包网夹持装置夹持,所述物料包中物料由所述排料门排出。
根据本发明实施例的拆包机控制方法,至少具有如下技术效果:通过推料装置可以实现对物料包的自动推进,取消人工参与推料过程,料包高度检测单元可以检测物料包的高度,从而可以便于获取物料包的高度信息,以及根据高度信息调整包网夹持装置的夹持高度,使得包网夹持装置可以夹取出包网,最终完成对物料包的自动拆解过程。应用了本发明实施例的拆包机控制方法的拆包机,相较于传统的拆解方式而言,无需人工参与拆包过程,极大的提高了拆包的速度,提高了人员的安全性,减少了拆包人员的投入,适合进行规模化推广和使用。
根据本发明的一些实施例,所述料包高度检测单元包括测距支架和激光测距传感器;所述测距支架设置于所述物料传输平台上;所述激光测距传感器与所述第一控制单元电性连接并设置于所述测距支架上;
所述根据所述高度数据确认所述物料包的高度信息,包括以下步骤:
获取所述激光测距传感器采集的所述物料传输平台上未放置所述物料包时的平台高度,以及所述物料传输平台上放置所述物料包时的物料高度;
根据所述平台高度和所述物料高度计算出所述高度信息。
根据本发明的一些实施例,所述包网夹持装置包括第一夹持部、第一高度定位单元、第二夹持部、第二高度定位单元;所述第一高度定位单元包括多个第一高度检测开关单元,所述第二高度定位单元包括多个第二高度检测开关单元;所述第二夹持部与所述第一夹持部存在高度差;多个第一高度检测开关单元等间距布置,多个第二高度检测开关单元等间距布置;
所述高度差需要满足约束公式:
h1+(C1-1)*k1 式中,C1为所述第一高度检测开关单元的数量,C2为第二高度定位单元的数量,h1为位于最下端的所述第一高度检测开关单元距离所述物料传输平台的高度,h2为位于最下端的所述第二高度检测开关单元距离所述物料传输平台的高度,k1为相邻两个所述第一高度检测开关单元之间的安装距离,k2为相邻两个所述第二高度检测开关单元之间的安装距离。 根据本发明第三方面实施例的物料预处理系统,包括: 如上述的拆包机; 皆与所述第一控制单元电性连接的第一链板输送机和第二链板输送机,分别设置于所述物料传输平台的进料端和出料端; 筛选组件,与所述第一控制单元电性连接,用于筛选所述第二链板输送机传输的物料; 单轴破碎机,用于破碎所述筛选组件筛选之后的物料; 变频单元,用于驱动所述单轴破碎机; 电流检测单元,用于检测所述单轴破碎机中主电机的电流数据; 第二控制单元,分别与所述变频单元、单轴破碎机和电流检测单元电性连接; 显控单元,与所述第二控制单元电性连接。 根据本发明实施例的物料预处理系统,至少具有如下技术效果:通过采用本发明实施例的拆包机,可以提高整个物料预处理过程的流畅度和自动化程度;通过筛选组件可以将不能进入破碎机或不需要进入破碎机的物料进行筛离,通过变频单元可以实现对单轴破碎机的变频控制;通过电流检测单元可以检测破碎机的主电机的电流数据,从而可以根据电流数据实现对破碎机推料器的有效控制;通过显控单元可以完成对物料预处理系统的可视化控制和调整。 根据本发明的一些实施例,上述物料预处理系统还包括交换机;所述变频单元、第一控制单元、显控单元、第二控制单元接通过所述交换机进行通信。 根据本发明的一些实施例,上述物料预处理系统还包括与所述交换机电性连接的数据采集模块。 根据本发明第四方面实施例的物料预处理系统控制方法,应用于如上述的物料预处理系统,所述物料预处理系统控制方法包括以下步骤: 启动单轴破碎机、筛选组件、第一链板输送机、第二链板输送机、拆包机; 持续获取所述单轴破碎机的电流数据; 若所述电流数据低于第一预设电流阈值,控制所述单轴破碎机的推料器以最大工作速度移动; 若所述电流数据高于第二预设电流阈值,控制所述单轴破碎机的推料器停止工作; 若所述电流数据处于所述第一预设电流阈值与所述第二预设电流阈值之间,所述单轴破碎机的推料器的推进速度与所述电流数据的大小成负相关。 根据本发明实施例的物料预处理系统控制方法,至少具有如下技术效果:通过采用本发明实施例的拆包机,可以提高整个物料预处理过程的流畅度和自动化程度;通过筛选组件可以将不能进入破碎机或不需要进入破碎机的物料进行筛离,通过变频单元可以实现对单轴破碎机的变频控制;通过电流检测单元可以检测破碎机的主电机的电流数据,从而可以根据电流数据的大小实现对破碎机推料器的有效控制,避免出现过载或长时间处于低效率运行的情况出现。 本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。 附图说明 本发明的上述或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中: 图1是本发明实施例的拆包机的结构示意图; 图2是本发明实施例的拆包机的电气系统框图; 图3是本发明实施例的物料预处理系统的结构框图; 图4是本发明实施例的物料预处理系统的电气系统框图; 图5是本发明实施例的物料预处理系统的硬件通讯框图; 图6是本发明实施例的单轴破碎机的示意图(未示出推料器)。 附图标记; 物料传输平台110、推料装置120、料包高度检测单元130、破网装置140、包网夹持装置150、第一升降机构151、第一夹持部152、第一高度定位单元153、第二升降机构154、第二夹持部155、第二高度定位单元156、第一控制单元160、料包位置检测单元170、 第一链板输送机200、 第二链板输送机300、 筛选组件400、滚筒筛410、磁选机420、 单轴破碎机500、主轴510、动刀511、定刀521、调节螺栓522、主电机530、传动带540、减速箱550、 变频单元600、 电流检测单元700、 第二控制单元800、 显控单元900、交换机910、数据采集模块920。 具体实施方式 下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。 在本发明的描述中,如果有描述到第一、第二、第三、第四等等只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。 本发明的描述中,除非另有明确的限定,设置、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。 根据图1至图6描述根据本发明第一方面实施例的拆包机。 根据本发明实施例的拆包机,包括:物料传输平台110、推料装置 120、料包高度检测单元130、破网装置140、包网夹持装置150、第一控制单元160。 推料装置120,用于推动物料包在物料传输平台110上前移; 料包高度检测单元130,用于检测物料包的高度; 破网装置140,设置于物料传输平台110中,用于破开物料包的包网; 包网夹持装置150,其具备可调节高度的伸缩夹持端,用于夹持物料包的包网; 第一控制单元160,分别与推料装置120、料包高度检测单元130、破网装置140和包网夹持装置150电性连接。 参考图1、图2,物料传输平台110水平设置,物料包可以在物料传输平台110上被推移,推料装置120的推进方向与物料传输平台110 平行,且朝向物料传输平台110中的排料门方向。在物料包被第一链板输送机200传输到物料传输平台110后,推料装置120可以将物料包推向排料门方向。 在推进过程中,料包高度检测单元130可以检测出物料包的高度信息,第一控制单元160在确定高度信息后,便可以调整包网夹持装置150 的高度,从而使得包网夹持装置150可以从物料包的上端夹持住物料包的包网。此过程中,推料装置120持续推进物料包,物料包会被设置于物料传输平台110底部的破网装置140破开包网,从而使得包网中物料和包网分离,推料装置120推进完整个行程后,便会开始缩回,此时物料和包网已完成分离,物料会通过物料传输平台110上的排料门将物料排出到第二链板输送机300上,进行后续的预处理工作。 根据本发明实施例的拆包机,通过推料装置120可以实现对物料包的自动推进,取消人工参与推料过程,料包高度检测单元130可以检测物料包的高度,从而可以便于调整包网夹持装置150的夹持高度,通过破网装置140可以将物料包的包网破网,让物料和包网可以分离,从而使得包网夹持装置150可以夹取出包网,最终完成对物料包的自动拆解过程。本发明实施例的拆包机相较于传统的拆解方式而言,无需人工参与拆包过程,极大的提高了拆包的速度,提高了人员的安全性,减少了拆包人员的投入,适合进行规模化推广和使用。 在本发明的一些实施例中,参考图1,推料装置120可以采用伸缩油缸。将伸缩油缸水平设置,伸缩油缸的伸缩轴便可以推动物料包前移。可以在伸缩油缸的伸缩轴前端设置推送平板,以保证推送物料包时的稳定性。在本发明的一些实施例中,推料装置120也可以采用电动推送装置,例如:利用电机驱动丝杆,再通过丝杆来推动物料包前移,或直接采用伸缩电机,通过伸缩电机的伸缩轴完成推移工作。这里需要说明,采用伸缩油缸进行推进时,可以提供更大的推力,适合对体积或重量较大的物料包进行推进。这里需说明,在拆包机整体结构确定时,推料装置120的推进行程也会确定,推进装置在推进过程中,只需要推完整个行程即可。 在本发明的一些实施例中,参考图1,料包高度检测单元130包括:测距支架(图中未示出)、激光测距传感器。测距支架,设置于物料传输平台110上;激光测距传感器,与第一控制单元160电性连接并设置于测距支架上。激光测距传感器通过测距支架可以垂直于物料传输平台 110设置,从而可以实现由上往下检测到物料平台的距离、以及检测到物料包的距离。这里对如何检测出物料包的原理进行一个简述:在没有物料包时,激光测距传感器检测到的数据为到物料传输平台110的距离,在物料包遮挡激光测距传感器发出的激光后,激光测距传感器检测到的数据为激光测距传感器到物料包的距离,两个距离的差值便是物料包的高度信息,根据这一高度信息便可以准确的计算出包网夹持装置150的高度。 在本发明的一些实施例中,参考图1,料包高度检测单元130有多个。设置多个料包高度检测单元130,可以同时检测到多组高度数据,通过对多组高度数据进行求平均数操作,将平均数作为高度信息,可以减少因为物料包形变带来的高度信息误差。在实际计算时,也可以持续利用单个料包高度检测单元130采集物料包的高度数据,之后再对该时间段内采集的物料包的高度数据求平均数即可,采用该种方式可以减少料包高度检测单元130的布置数量,但是实时性相较于设置多个料包高度检测单元130更差,需要在物料传输平台110上预留足够的距离,以便包网夹持装置150调整高度。 在本发明的一些实施例中,参考图1,破网装置140包括与第一控制单元160电性连接的锯片电机、以及设置于锯片电机输出轴上的锯片。物料传输平台110上设置有槽状通孔,通孔位置位于物料包行进的方向上,锯片电机设置在物料传输平台110的下方,锯片的锯齿可以通过通孔切割到物料包的包网。在物料包持续前移过程中,锯齿会对整个物料包底部的包网底部完成切割,从而使得内部的物料可以分离出来。 在本发明的一些实施例中,参考图1,包网夹持装置150包括:第一升降机构151、第一驱动机构(图中未示出)、第一夹持部152、第一高度定位单元153。第一升降机构151,其具有第一升降端;第一驱动机构,与第一控制单元160电性连接,用于驱动第一升降端进行升降;第一夹持部152,与第一升降端连接,用于夹持物料包的包网;第一高度定位单元153,与第一控制单元160电性连接,用于反馈第一夹持部 152的高度。 第一升降机构151具备升降能力,第一夹持部152连接在第一升降机构151的第一升降端上后,便具备了与第一升降端同时升降的能力,而第一驱动机构可以驱动第一升降机构151实现升降。在本发明的一些实施例中,第一升降机构151可以采用伸缩油缸,第一驱动机构则为配套的液压驱动马达,第一升降端则可以认为是伸缩油缸的伸缩杆,第一夹持部152连接在伸缩杆上后,便可以跟随伸缩杆的升降实现同步升降。第一高度定位单元153设置于伸缩杆上,进而可以通过确定伸缩杆的伸缩距离来确定已升高或下降的高度,最终实现根据物料包高度信息调整第一夹持部152高度的目的,使得第一夹持部152可以实现对物料包包网的夹持。此外,第一升降机构151也可以采用电动升降结构实现对第一夹持部152高度的调节。 在本发明的一些实施例中,参考图1,包网夹持装置150还包括:第二升降机构154、第二驱动机构(图中未示出)、第二夹持部155、第二高度定位单元156。第二升降机构154,其具有第二升降端;第二驱动机构,与第一控制单元160电性连接,用于驱动第二升降端进行升降;第二夹持部155,与第二升降端连接,第二夹持部155与第一夹持部152 共同用于夹持物料包的包网;第二夹持部155与第一夹持部152存在高度差;第二高度定位单元156,与第一控制单元160电性连接,用于反馈第二夹持部155的高度。 第二升降机构154同样具备升降能力,第二夹持部155连接在第二升降机构154的第二升降端上后,便具备了与第二升降端同时升降的能力,而第二驱动机构可以驱动第二升降机构154实现升降。在本发明的一些实施例中,第二升降机构154同样可以采用伸缩油缸,第二驱动机构则为配套的液压驱动马达,第二升降端则可以认为是伸缩油缸的伸缩杆,第二夹持部155连接在伸缩杆上后,便可以跟随伸缩杆的升降实现同步升降。第二高度定位单元156设置于伸缩杆上,进而可以通过确定伸缩杆的伸缩距离来确定已升高或下降的高度,最终实现根据物料包高度信息调整第二夹持部155高度的目的。第二夹持部155和第一夹持部 152在调节高度时,会处于同一个垂直平面中,并存在一定的高度差,这样可以使得对包网的夹持更加的紧密,防止包网从包网夹持装置150 中脱落。 在本发明的一些实施例中,参考图1,第二夹持部155与第一夹持部152皆为杆状结构。采用杆状结构可以让第二夹持部155与第一夹持部152更为容易的穿入包网内,从而实现对包网有效夹持。第二夹持部 155与第一夹持部152也可以采用类似于爪状的异形结构,或者其他将于夹持或抓取的异形结构。 在本发明的一些实施例中,参考图1,第一高度定位单元153包括:第一感应部件、多个第一高度检测开关单元。多个皆与第一控制单元160 电性连接的第一高度检测开关单元,多个第一高度检测开关单元延第一升降端的升降方向间隔设置;第一感应部件,设置于第一升降端上,用于触发第一高度检测开关单元。以第一升降机构151为伸缩油缸进行说明,多个第一高度检测开关单元延伸缩轴轴向布置,第一感应部件设置在伸缩轴上,当第一感应部件接近某一个第一高度检测开关单元,该第一高度检测开关单元会输出一个有效信号,从而可以判断出当前第一感应部件的位置,而第一感应部件、第一夹持部152皆与伸缩杆固定连接,因此在确定第一感应部件位置后,便可以确定第一夹持部152的位置。 在本发明的一些实施例中,参考图1,第二高度定位单元156包括:第二感应部件、多个第二高度检测开关单元。多个皆与第一控制单元160 电性连接的第二高度检测开关单元,多个第二高度检测开关单元延第二升降端的升降方向间隔设置;第二感应部件,设置于第二升降端上,用于触发第二高度检测开关单元。以第二升降机构154为伸缩油缸进行说明,多个第二高度检测开关单元延伸缩轴轴向布置,第二感应部件设置在伸缩轴上,当第二感应部件接近某一个第二高度检测开关单元,该第二高度检测开关单元会输出一个有效信号,从而可以判断出当前第二感应部件的位置,而第二感应部件、第二夹持部155皆与伸缩杆固定连接,因此在确定第二感应部件位置后,便可以确定第二夹持部155的位置。 这里需要说明,在本发明的一些实施例中,第一高度检测开关单元和第二高度检测开关单元可以采用磁吸检测开关或其他类似的接近开关装置,第一感应部件和第二感应部件可以采用磁铁块或金属块,从而可以实现对磁吸检测开关的触发。 在本发明的一些实施例中,参考图1,上述拆包机还包括与第一控制单元160电性连接的料包位置检测单元170。料包位置检测单元170 可以用于检测物料包是否已经掉落到物料传输平台110上。一旦检测到有物料包掉落到平台上,就进入拆包过程,拆包过程如下:1.启动锯片电机和推料装置120;2.启动料包高度检测单元130检测料包高度信息,并根据料包高度自动调节包网夹持装置150的高度;3.控制推料装置120 推进物料包,完成对物料包的切包;4.推料装置推进到位后,物料传输平台110右边两侧的排料门自动打开卸料,同时推料装置后退到原始位置;5.包网夹持装置150降低到最低位(即初始设定位置);6.排料门重新闭合。 在本发明的一些实施例中,参考图1,料包位置检测单元170包括皆与第一控制单元160电性连接的两个位置检测开关,两个位置检测开关共同用于检测物料包在物料传输平台110上的前进状态。两个位置检测开关分别设置在物料传输平台110上物料包的一端,以及接近排料门的一端,当位于上物料包的一端的位置检测开关被触发,启动锯片电机,当接近排料门的一端的位置检测开关被触发且触发信号消失后,停止锯片电机。 根据本发明第二方面实施例的拆包机控制方法,应用于如上述的拆包机,拆包机控制方法包括以下步骤: 控制推料装置120将物料包朝物料传输平台110中排料门方向推移; 接收料包高度检测单元130采集的高度数据; 根据高度数据确认物料包的高度信息; 根据高度信息调整包网夹持装置150的伸缩夹持端的高度; 通过破网装置140破开物料包的包网; 持续控制推料装置120推动物料包,直至物料包中的物料和包网分离,其中,物料包的包网被包网夹持装置150夹持,物料包中物料由排料门排出。 参考图1、图2,物料传输平台110水平设置,物料包可以在物料传输平台110上被推移,推料装置120的推进方向与物料传输平台110平行,且朝向物料传输平台110中的排料门方向。在物料包被第一链板输送机200传输到物料传输平台110后,推料装置120可以将物料包推向排料门方向。 在推进过程中,料包高度检测单元130持续采集高度数据,此过程中高度数据分为两种,即有物料包和无物料包,没有物料包时,高度数据较大,存在物料包时,高度数据较小,通过计算两个高度数据之间的差值便可以确定物料包的高度信息。在实际计算时,因为是连续采集,因此可以通过判断高度数据的变化值来确定是否检测到物料包,从而减少持续进行计算的时间。 在确定高度信息后,便可以调整包网夹持装置150的高度,从而使得包网夹持装置150可以从物料包的上端夹持住物料包的包网。此过程中,推料装置120持续推进物料包,物料包会被设置于物料传输平台110 底部的破网装置140破开包网,从而使得包网中物料和包网分离,推料装置120推进完整个行程后,便会开始缩回,此时物料和包网已完成分离,物料会通过物料传输平台110上的排料门将物料排出到第二链板输送机300上,进行后续的预处理工作。 根据本发明实施例的拆包机控制方法,通过推料装置120可以实现对物料包的自动推进,取消人工参与推料过程,料包高度检测单元130 可以检测物料包的高度,从而可以便于获取物料包的高度信息,以及根据高度信息调整包网夹持装置150的夹持高度,使得包网夹持装置150 可以夹取出包网,最终完成对物料包的自动拆解过程。应用了本发明实施例的拆包机控制方法的拆包机,相较于传统的拆解方式而言,无需人工参与拆包过程,极大的提高了拆包的速度,提高了人员的安全性,减少了拆包人员的投入,适合进行规模化推广和使用。 在本发明的一些实施例中,参考图1,料包高度检测单元130包括测距支架和激光测距传感器;测距支架设置于物料传输平台110上;激光测距传感器与第一控制单元160电性连接并设置于测距支架上; 根据高度数据确认物料包的高度信息,包括以下步骤: 获取激光测距传感器采集的物料传输平台110上未放置物料包时的平台高度,以及物料传输平台110上放置物料包时的物料高度; 根据平台高度和物料高度计算出高度信息。 激光测距传感器持续检测的高度数据,在没有物料包时,检测到的是安装位置到物料传输平台110的平台高度,在推料装置120将物料包推送到遮挡激光测距传感器位置时,激光测距传感器检测到的是安装位置到物料包上表面的物料高度,物料高度和平台高度的差值便是物料包的高度信息。激光测距传感器也可以替换为超声波测距传感器,同样可以达到采集高度数据的效果。 在本发明的一些实施例中,参考图1,料包高度检测单元130有两个,两个料包高度检测单元130同时采集高度数据,通过同时计算差值,并计算差值的平均值,可以得到误差更小的高度信息。 在本发明的一些实施例中,参考图1,包网夹持装置150包括第一夹持部152、第一高度定位单元153、第二夹持部155、第二高度定位单元156;第一高度定位单元153包括多个第一高度检测开关单元,第二高度定位单元156包括多个第二高度检测开关单元;第二夹持部155与第一夹持部152存在高度差;多个第一高度检测开关单元等间距布置,多个第二高度检测开关单元等间距布置; 高度差需要满足约束公式: h1+(C1-1)*k1 式中,C1为第一高度检测开关单元的数量,C2为第二高度定位单元156的数量,h1为位于最下端的第一高度检测开关单元距离物料传输平台110的高度,h2为位于最下端的第二高度检测开关单元距离物料传输平台110的高度,k1为相邻两个第一高度检测开关单元之间的安装距离,k2为相邻两个第二高度检测开关单元之间的安装距离。 通过上述的约束公式来设置第二夹持部155与第一夹持部152存在的高度差,可以更好的实现对物料包包网的夹持,防止出现脱落或夹持不到位。 根据本发明第三方面实施例的物料预处理系统,包括:如上述的拆包机、第一链板输送机200、第二链板输送机300、筛选组件400、单轴破碎机500、变频单元600、电流检测单元700、第二控制单元800、显控单元900。 皆与第一控制单元160电性连接的第一链板输送机200和第二链板输送机300,分别设置于物料传输平台110的进料端和出料端; 筛选组件400,与第一控制单元160电性连接,用于筛选第二链板输送机300传输的物料; 单轴破碎机500,用于破碎筛选组件400筛选之后的物料; 变频单元600,用于驱动单轴破碎机500; 电流检测单元700,用于检测单轴破碎机500中主电机530的电流数据; 第二控制单元800,分别与变频单元600、单轴破碎机500和电流检测单元700电性连接; 显控单元900,与第二控制单元800电性连接。 参考图1至图6,物料包在被抓取到第一链板输送机200上后,会通过第一链板输送机200输送到拆包机,拆包机会将物料包中的物料分离出来,然后排出到第二链板输送机300上,第二链板输送机300进一步将物料输送到筛选组件400进行筛选,将不需要进行破碎和无法进行破碎的物料筛选出去,之后,经过筛选的物料会进入破碎机中破碎成颗粒,以备后续进行使用。 变频单元600可以调节单轴破碎机500的转速,使得在启动时不再需要软起动电路的参与,简化了整体的结构;变频单元600可以直接猜采用变频器。同时,采用变频器之后,具备了精准调节的能力,可以以较低的转速控制单轴破碎机500主轴510转动,从而可以再需要更换单轴破碎机500主轴510上的刀粒时,可以更加的便捷与快速。在本发明的一些实施例中,会在单轴破碎机500机身的对角设置分别上两个点动开关,只有在两个电动开关同时按下时,才能实现点动,保证了操作人员的安全性。 电流检测单元700可以检测单轴破碎机500主电机530的电流,这个电流值可以直接有效的反馈主电机530的工作负荷,工作负荷越大则说明单轴破碎机500中物料越多,此时则需要减缓单轴破碎机500的推料器推送物料的速度,防止出现破碎机过载、过流。 根据本发明实施例的物料预处理系统,通过采用本发明实施例的拆包机,可以提高整个物料预处理过程的流畅度和自动化程度;通过筛选组件400 可以将不能进入破碎机或不需要进入破碎机的物料进行筛离,通过变频单元600可以实现对单轴破碎机500的变频控制;通过电流检测单元700 可以检测破碎机的主电机530的电流数据,从而可以根据电流数据实现对破碎机推料器的有效控制;通过显控单元900可以完成对物料预处理系统的可视化控制和调整。 为了更好的理解单轴破碎机500,这里对单轴破碎机500进行一个简单的介绍。参考图6,单轴破碎机500包括了两个主电机530、两个传动带540、两个减速箱550以及破碎机主体,两个主电机530需要两个变频单元600进行驱动,进而可以通过两个主电机530带动传动带540、减速箱550工作,并进一步从两侧带动单轴破碎机500的主轴510转动。破碎机主体包括机架以及设置于机架上的主轴510,主轴510上设置有动刀511,机架两侧设置有定刀521,在主轴510转动时,便可以通过动刀511和定刀521对物料进行破碎;机架上设置有调节螺栓522,通过调节螺栓522实现对定刀521的调节。这里需要说明,在进行点动操作时,可以选择仅使用一个主电机530驱动主轴510转动。单轴破碎机 500还包括了推料器,推料器可以将物料推送到破碎机主轴510上,然后让动刀511和定刀521进行破碎。在本发明的一些实施例中,单轴破碎机500还包括与第二控制单元800电性连接的主轴转速检测传感器、推料器油缸压力检测传感器、推料器油箱温度检测传感器、主电机电机绕组温度检测传感器及主轴轴承温度检测传感器,从而可以实现速度检测、推料器比例压力流量控制以及许多保护功能,例如:失速保护,超温报警保护,过流报警。 在本发明的一些实施例中,参考图3,筛选组件400包括了依次设置的滚筒筛410和磁选机420。拆包机对对整捆物料进行拆包,滚筒筛 410在拆包之后的物料中筛选掉泥土砂石等杂质,再经过磁选机420将秸秆中的铁屑铁钉分离出去,最后将纯净的秸秆送入单轴破碎机500进行破碎后,实现预处理。 在本发明的一些实施例中,参考图2、图3、图4,上述物料预处理系统还包括交换机910;变频单元600、第一控制单元160、显控单元 900、第二控制单元800接通过交换机910进行通信。通过交换机910 进行数据交互,可以简化线路连接,且便于进行功能扩展,同时通过交换机910可以实现与中控中心的通讯,为远程监控提供基础。这里需要说明,针对破碎机两侧主电机530设置的两个变频单元600会通过CAN 通信模块进行通讯连接,从而可以在只有一台变频单元600接收到交换机910传输的控制信号时,也能够实现对两台主电机530的同步控制。同时,两个变频单元600之间能自动进行负载电流跟踪,以确保任意时刻两台电机的负载电流接近相等,避免出现负载不均所导致的电流超差事故。 在本发明的一些实施例中,参考图5,上述物料预处理系统还包括与交换机910电性连接的数据采集模块920。在现场时,大多数情况都不会仅仅只具有一台破碎机,还会其它很多的设备,通过数据采集模块 920可以将其它设备采集的数据通过交换机910传输到中控中心。 在本发明的一些实施例中,电流检测单元700可以采用电流变送器,或者采用电流传感器,皆可以有效的检测到破碎机主电机530的电流数据。 在本发明的一些实施例中,第一控制单元160和第二控制单元800 皆采用PLC,具体采用S7-200 SMART。变频单元600采用英威腾 GD350-19-315G-4。数据采集模块920采用HINET-M111T。交换机910 采用东土科技OPAL8-E-8T-LV-LV。 根据本发明第四方面实施例的物料预处理系统控制方法,应用于如上述的物料预处理系统,物料预处理系统控制方法包括以下步骤: 启动单轴破碎机500、筛选组件400、第一链板输送机200、第二链板输送机300、拆包机; 持续获取单轴破碎机500的电流数据; 若电流数据低于第一预设电流阈值,控制单轴破碎机500的推料器以最大工作速度移动; 若电流数据高于第二预设电流阈值,控制单轴破碎机500的推料器停止工作; 若电流数据处于第一预设电流阈值与第二预设电流阈值之间,单轴破碎机500的推料器的推进速度与电流数据的大小成负相关。 在物料预处理系统理论工作环境下,只需要启动单轴破碎机500、筛选组件400、第一链板输送机200、第二链板输送机300、拆包机口即可开始物料破碎工作。但是实际上,随着破碎机需要破碎的物料不同、物料的密度不同等,会导致破碎机的工况出现变化,此时如果仍然进行简单的物料推送,则可能会导致破碎机主体出现过载。本发明实施例的物料预处理系统控制方法则可以根据破碎机主体的工作状态来控制推料器的推料速度。而单轴破碎机500的电流数据便可以直观的反应破碎机的工作状态,也因此,这里直接使用单轴破碎机500的电流数据进行推料器的推料控制。 推料的原则是:破碎机在轻载(即电流数据低于第一预设电流阈值) 情况下,进行全速送料,破碎机在重载(即电流数据高于第二预设电流阈值)情况下,停止送料,且在正常工作范围(电流数据处于第一预设电流阈值与第二预设电流阈值之间)内,让推料器送料速度和破碎机主电机530的电流数据大小成负相关。即,破碎机中物料越多,则送料器的送料速度越慢。 具体的,1、主电机530电流不超过额定电流的0.3倍时,比例流量和比例压力取最大值10V,推料器以最快速度移动;2、主电机530电流介于0.3倍与0.8倍额定电流之间时,比例流量随电流反向线性调节,即,电流越大输出越小,推料器速度越慢。3、主电机530电流达到或超过0.8倍额定电流值时,比例流量和比例压力值均设置为0V,意味着推料器停止前进。接着,推料器后退2秒钟后再折返前进,恢复正常循环。 根据本发明实施例的物料预处理系统控制方法,通过采用本发明实施例的拆包机,可以提高整个物料预处理过程的流畅度和自动化程度;通过筛选组件400可以将不能进入破碎机或不需要进入破碎机的物料进行筛离,通过变频单元600可以实现对单轴破碎机500的变频控制;通过电流检测单元700可以检测破碎机的主电机530的电流数据,从而可以根据电流数据的大小实现对破碎机推料器的有效控制,避免出现过载或长时间处于低效率运行的情况出现。 在本发明的一些实施例中,会存在松散轻质物料,这些物料不会通过物料包的形式进行传输,而是会直接通过抓爪抓取到第一链板输送机 200上。这些轻质物料对破碎机的负荷增加不大,因此,在遇到需压迫处理轻质物料时,会将推料器的行程由全行程变换为半行程,即推料器后退未达到终了位置就重新折返开始前进,从而极大的提高推料器的推送频率。 在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。 尽管上述结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。