一种适用于智能汽车的雨雾环境测试场及测试方法
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及汽车智能试验场技术领域,尤其涉及一种适用于智能汽车的雨雾环境测试场及测试方法。
背景技术
对于智能汽车,雨雾环境测试是检测车辆的雨雾环境通过能力及制定智能驾驶车辆行车安全策略制定重要依据之一。目前,缺乏对智能汽车在雨雾环境下安全行驶的标准的、贴近于真实行驶环境的测试场,因此,亟需一种能够对智能汽车在雨雾环境下的行驶能力进行标准的以及贴近于真实行驶环境的测试场,以使智能汽车能够根据雨雾路段的路况做出正确判断,更好的测试智能汽车通过雨雾环境的能力。
发明内容
(一)要解决的技术问题
鉴于现有技术的上述缺点、不足,本发明提供一种适用于智能汽车的雨雾环境测试场及测试方法,能够提供一种对智能汽车雨雾环境行驶能力进行标准的以及贴近于真实行驶环境的测试场。
(二)技术方案
为了达到上述目的,本发明采用的主要技术方案包括:
第一方面,本发明实施例提供一种适用于智能汽车的雨雾环境测试场,包括道路、支撑架、降雨喷头、降雾喷头以及控制降雨喷头和降雾喷头开启和关闭的雨雾控制系统。沿待测车辆的行驶方向,道路依次包括驶入路段、雨雾测试路段和驶离路段。支撑架架设在雨雾测试路段上,支撑架用于固定降雨喷头和降雾喷头,降雨喷头和降雾喷头位于雨雾测试路段的上方。雨雾控制系统用于在待测车辆驶入雨雾测试路段之前,控制降雨喷头和降雾喷头开启,降雨喷头和降雾喷头开启时,雨雾测试路段形成雨雾场景。
根据本发明,还包括预警系统,预警系统用于监测雨雾测试路段的路况信息,并在待测车辆进入至少包括雨雾测试路段的预定区域时,将路况信息发送至待测车辆。路况信息包括如下一种或多种:雨量信息;雾量信息;避险预警信息;车辆碰撞预警信息;行人穿越预警信息;移动障碍物信息;固定障碍物信息。
根据本发明,还包括服务器组件,预警系统包括障碍物摄像机、通信单元和交换机。障碍物摄像机设置在雨雾测试路段上,障碍物摄像机和服务器组件通讯连接,障碍物摄像机用于拍摄路况形成图像信息,并将图像信息发送至服务器组件。服务器组件分析前方的待测车辆处于危险行驶状态时,形成避险预警信息,并依次经交换机、通信单元将避险预警信息发送至后方的待测车辆的车载单元。
根据本发明,预警系统还包括障碍物探测器。障碍物探测器设置在雨雾测试路段上,障碍物探测器和服务器组件通讯连接。多个待测车辆同时测试时,障碍物探测器能够将每一待测车辆的车辆定位信息、车辆型号信息、车辆行驶轨迹信息、车速信息和车灯状态信息中的一种或多种发送至服务器组件,服务器组件运算形成车辆碰撞预警信息,并将车辆碰撞预警信息依次经交换机、通信单元发送至每一待测车辆的车载单元。行人穿过雨雾环境测试路段时,障碍物探测器能够识别行人并将行人的行人定位信息、行人行走轨迹信息和行人行走速度信息中的一种或多种发送至服务器组件,服务器组件运算形成行人穿越预警信息,并将行人穿越预警信息依次经交换机、通信单元发送至待测车辆的车载单元。
根据本发明,移动障碍物穿过雨雾环境测试路段时,障碍物探测器能够识别移动障碍物并将移动障碍物的移动障碍物定位信息、移动轨迹信息和速度信息中的一种或多种发送至服务器组件,服务器组件运算形成移动障碍物穿越预警信息,并将移动障碍物穿越预警信息依次经交换机、通信单元发送至待测车辆的车载单元。雨雾环境测试路段上出现影响待测车辆正常行驶的固定障碍物时,障碍物探测器能够识别固定障碍物并将固定障碍物的固定障碍物定位信息发送至服务器组件,服务器组件运算形成固定障碍物预警信息,并将固定障碍物预警信息依次经交换机、通信单元发送至待测车辆的车载单元。
根据本发明,服务器组件包括边缘计算服务器和数据中心,边缘计算服务器和数据中心通讯连接,边缘计算服务器用于将接收到的信息运算形成路况信息,并将路况信息发送至待测车辆,以及将接收到的信息和路况信息发送至数据中心,数据中心用于运算接收到的信息并判断是否和路况信息一致。或者,服务器组件包括数据中心,数据中心用于将接收到的信息运算形成路况信息。
根据本发明,雨雾控制系统包括雨量探测器、雾量探测器、降雨喷雾自控子系统、车辆驶入探测器和车辆驶离探测器。雨量探测器固定在支撑架上,并位于降雨喷头的下方,雾量探测器固定在支撑架上,并位于降雾喷头的下方,雨量探测器和雾量探测器均分别和降雨喷雾自控子系统通讯连接。雨量探测器用于监测雨量信息,并将雨量信息发送至降雨喷雾自控子系统,雾量探测器用于监测雾量信息,并将雾量信息发送至降雨喷雾自控子系统。降雨喷雾自控子系统用于根据规定的降雨量和雨量探测器反馈的实际雨量信息调节降雨喷头的降雨量,控制降雨喷头的启闭,根据规定的降雾量和雾量探测器反馈的实际雾量信息调节降雾喷头的降雾量,控制降雨喷头的启闭,以及将降雨量信息和降雾量信息发送至服务器组件。车辆驶入探测器位于驶入路段,车辆驶离探测器位于驶离路段,车辆驶入探测器和车辆驶离探测器均分别和服务器组件通讯连接。车辆驶入探测器用于在采集到待测车辆经过时,向服务器组件发送驶入信息,服务器组件接收驶入信息后判断是否满足降雨喷头和降雾喷头的开启条件,并将判断结果信息发送至降雨喷雾自控子系统,降雨喷雾自控子系统控制降雨喷头和降雾喷头开启。驶离探测器用于在采集到待测车辆经过时,向服务器组件发送驶离信息,服务器组件接收驶离信息后判断是否满足雨雾喷头关闭条件,并将判断结果信息发送至降雨喷雾自控子系统,降雨喷雾自控子系统控制降雨喷头和降雾喷头关闭。
第二方面,本发明还提供一种适用于智能汽车的雨雾环境测试方法,包括对测试场进行场景布置和待测车辆响应。场景布置为:测试场包括道路、支撑架、降雨喷头、降雾喷头以及控制降雨喷头和降雾喷头开启和关闭的雨雾控制系统。沿待测车辆的行驶方向,道路依次包括驶入路段、雨雾测试路段和驶离路段。支撑架架设在雨雾测试路上,支撑架用于固定降雨喷头和降雾喷头,降雨喷头和降雾喷头位于雨雾测试路段的上方。雨雾控制系统用于在待测车辆驶入雨雾测试路段之前,控制降雨喷头和降雾喷头开启,降雨喷头和降雾喷头开启时,雨雾测试路段形成雨雾场景。待测车辆响应为:待测车辆从驶入路段的起点朝向雨雾测试路段行驶至进入至少包括雨雾测试路段的预定区域时,根据机械视觉采集的环境数据,制定行车策略,最终安全通过雨雾测试路段。
根据本发明,测试场还包括预警系统。预警系统用于监测雨雾测试路段的路况信息,并在待测车辆进入至少包括雨雾测试路段的预定区域时,将路况信息发送至待测车辆。
根据本发明,测试场还包括服务器组件,预警系统包括障碍物摄像机、障碍物探测器、通信单元和交换机。障碍物摄像机设置在雨雾测试路段上,障碍物摄像机和服务器组件通讯连接,障碍物摄像机用于拍摄路况形成图像信息,并将图像信息发送至服务器组件。服务器组件分析前方的待测车辆处于危险行驶状态时,形成避险预警信息,并依次经交换机、通信单元将避险预警信息发送至后方的待测车辆的车载单元。障碍物探测器设置在雨雾测试路段上,障碍物探测器和服务器组件通讯连接,障碍物探测器用于识别并定位待测车辆和行人,并将定位信息发送至服务器组件。多个待测车辆同时测试时,障碍物探测器能够将每一待测车辆的车辆定位信息发送至服务器组件,服务器组件运算形成车辆碰撞预警信息,并将车辆碰撞预警信息依次经交换机、通信单元发送至每一待测车辆的车载单元。行人穿过雨雾环境测试路段时,障碍物探测器能够识别行人并将行人的行人定位信息发送至服务器组件,服务器组件运算形成行人穿越预警信息,并将行人穿越预警信息依次经交换机、通信单元发送至待测车辆的车载单元。待测车辆响应为:待测车辆从驶入路段的起点朝向雨雾测试路段行驶至进入至少包括雨雾测试路段的预定区域时,接收避险预警信息、车辆碰撞预警信息和行人穿越预警信息并根据机械视觉采集的信息,最终安全通过雨雾测试路段。
(三)有益效果
本发明的有益效果是:本发明的适用于智能汽车的雨雾环境测试场及测试方法,通过设置道路、降雨喷头、降雾喷头以及控制降雨喷头和降雾喷头开启和关闭的雨雾控制系统,能够模拟雨雾测试环境,来模拟真实行驶环境,使测试结果能够更加准确地表现待测车辆对雨雾环境测试路段的响应性能,提供了一种可随时进行测试、占地面积小、成本低的雨雾环境的测试场以及测试方法。
附图说明
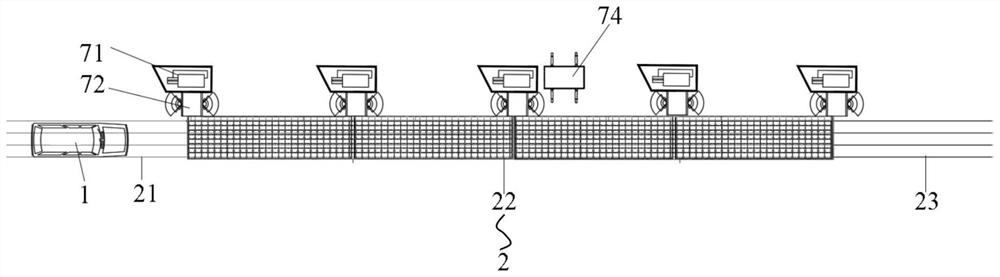
图1为本发明的适用于智能汽车的雨雾环境测试场的实施例1的示意图;
图2为图1中的预警系统的示意图;
图3为本发明的适用于智能汽车的雨雾环境测试场的实施例2的示意图;
图4为本发明的适用于智能汽车的雨雾环境测试场的实施例4的示意图;
图5为图1中的雨雾测试路段为室内的示意图;
图6为图1中的雨雾测试路段为室外的示意图;
图7为图1中的降雨喷头和降雾喷头的示意图;
图8为本发明的适用于智能汽车的雨雾环境测试场的实施例6的系统示意图。
【附图标记说明】
1:待测车辆;
2:道路;21:驶入路段;22:雨雾测试路段;23:驶离路段;24:降水收集设施;241:排水沟;242:边沟;25:防撞设施;
3:支撑架;
4:降雨喷头;
5:降雾喷头;
61:雨量探测器;62:降雨喷雾自控子系统;63:红外对射探测器;64:报警主机;65:雷达;66:服务器组件;
71:障碍物摄像机;72:障碍物探测器;73:交换机;74:通信单元;
81:沉砂池;82:过滤池;83:清水池;841:进水管;842:主输水管;843:降雨分水管;844:降雾分水管;85:降雨水泵;86:降雾水泵;87:电源;88:控制台;89:主水泵;
91:显示器;92:摄像机。
具体实施方式
以下结合附图对本发明的具体实施例做详细说明。
实施例1
参照图1-图8所示,在本实施例中,提供一种适用于智能汽车的雨雾环境测试场,测试场包括道路2、支撑架3、降雨喷头4、降雾喷头5以及控制降雨喷头4和降雾喷头5开启和关闭的雨雾控制系统。
沿待测车辆1的行驶方向,道路2依次包括驶入路段21、雨雾测试路段22和驶离路段23。支撑架3架设在雨雾测试路段22上,支撑架3用于固定降雨喷头4和降雾喷头5,降雨喷头4和降雾喷头5位于雨雾测试路段22的上方。雨雾控制系统用于在待测车辆1驶入雨雾测试路段22之前,控制降雨喷头4和降雾喷头5开启,降雨喷头4和降雾喷头5开启时,雨雾测试路段22形成雨雾场景。
具体地,预定区域还包括待测车辆1距雨雾测试路段22的前端至少126m的区域内。该预定区域用于为待测车辆1预留出可作出响应的距离,以便待测车辆1接收到雨雾测试路段22的雨量信息并能够做出保持当前速度、减速、刹车或变换车道绕过障碍物等行车策略。雨雾测试路段22的前端为图1中雨雾测试路段22的左端。
应用该测试场进行测试的过程是:
对测试场进行场景布置,放置好待测车辆1。待测车辆1从道路2的驶入路段21的起点朝向雨雾测试路段22行驶,当待测车辆1进入预定区域时,观察待测车辆1能否安全通过雨雾测试路段22。其中,“安全通过”即能够及时作出保持当前速度、减速或刹车等行车策略,并在减速时能够保证合适的、安全的行驶速度。
一方面,在真实行驶过程中,智能汽车的机械视觉采集装置能够采集到前方路况信息,由于雨雾测试路段22的可见度较低,使得智能汽车的机械视觉采集装置采集到的路况信息不能满足路线判别的要求,这便考验了智能汽车在雨雾环境下行驶时其车载感知系统能否根据机械视觉采集的现有信息进行智能化分析处理、判断和决策后最终在雨雾测试路段22上安全行驶的能力。因此,本实施例的测试场可形成雨雾测试路段22来模拟真实行驶环境,使测试结果能够更加准确地表现待测车辆1对雨雾测试路段22的响应性能,提供了一种可随时进行测试、占地面积小、成本低的雨雾环境的测试场,并通过多次测试待测车辆1,以在测试结束后针对系统存在的问题进行修改升级,直至待测车辆1的系统能够正确分析路况并制定行车策略,以安全通过雨雾测试路段22,进而使测试结果能够更加准确地表现待测车辆1对雨雾测试路段22的响应性能。
另一方面,该测试场可作为标准化场景提供不同智能汽车的测试使用,进而使得测试结果更加权威和可靠。同时,有利于我国根据本发明提供的测试场制定专业的检测和验收场地,为智能汽车上路行驶提供保障。
应用本实施例中的测试场进行雨雾路段测试的方法包括对上述测试场进行场景布置和待测车辆1响应。
具体地,场景布置为:测试场包括道路2、支撑架3、降雨喷头4、降雾喷头5以及雨雾控制系统。
沿待测车辆1的行驶方向,道路2依次包括驶入路段21、雨雾测试路段22和驶离路段23。支撑架3架设在雨雾测试路段22上,支撑架3用于固定降雨喷头4和降雾喷头5,降雨喷头4和降雾喷头5位于雨雾测试路段22的上方。雨雾控制系统可根据其具体的尺寸、功能并且在不影响测试的情况下,设置在道路2上或者道路2的周围。
可理解,测试场可视为硬件设施,其中包括道路2、支撑架3、降雨喷头4、降雾喷头5和雨雾控制系统,以及后续实施例中所提及的其他设备(例如供水装置等)。
进一步,待测车辆1响应为:待测车辆1从驶入路段21的起点朝向雨雾测试路段22行驶并进入预定区域时,根据机械视觉采集的环境数据,比对车载数据库或云端数据库,制定行车策略,最终安全通过雨雾测试路段22。即在本实施例中,所要监测的智能汽车的响应性能为其行驶经过雨雾测试路段22时,能够制定保持当前速度、减速、刹车、变换车道绕过前方障碍物(如行人)等行车策略,观察待测车辆1能顺利通过雨雾测试路段22时,视为该待测车辆1在雨雾环境下行驶的响应性能达标(合格)。
可选地,待测车辆1响应还可包括:待测车辆1在雨雾测试路段22行驶时的测试速度为小于等于60km/h。需要说明的是,该测试速度仅为举例说明,对此并不限定。下文中以测试速度为60km/h为例进行描述。
优选地,基于上述测试场和场景布置,道路2至少设置两车道,每一车道宽度为3-5m。
沿待测车辆1的行驶方向,驶入路段21包括加速路段和驶入匀速路段,驶离路段23包括驶离匀速路段和减速路段。
为满足待测车辆1在雨雾测试路段22行驶时测试速度的设置要求,需限定加速路段的长度,其具体设置长度按照待测车辆1的排量和加速度的大小进行确定。待测车辆1的排量和加速度越大时,其加速至最高车速所需的加速路段的长度越短。
以排量为1.5L的小型乘用车为例,加速路段的长度至少为130m。
以排量为4-10L的卡车为例,加速路段的长度至少为200m。
当待测车辆1加速至测试速度时,为保证待测车辆1的测试速度的准确性,要求待测车辆1在驶入匀速路段行驶时和驶离匀速路段行驶时的时长为1-6秒,优选为3-6秒,本申请优选采用3秒,并以此限定驶入匀速路段和驶离匀速路段的长度至少为50m。
减速路段的设置长度需满足待测车辆1的车速能够降低至0km/h,并留有调头空间。因此,将减速路段的长度设置为至少100m。
具体地,雨雾测试路段22的长度根据待测车辆1在雨雾环境下的测试时长及测试速度,或者根据实际测试需求进行确定。举例来说,测试时长为10-20s,更优选为13s,测试速度为60km/h时,雨雾测试路段22的设置长度优选为200m。当仅需要对待测车辆1通过雨雾环境路段22进行认证测试时,雨雾测试路段22的设置长度优选为100m。当然,根据测试时长及测试速度的具体要求,还可将雨雾测试路段22的长度设置为500m或其他数值。
需要说明的是,上述长度数值仅为举例说明的优选方案,对此并不限定,具体可根据实际需求进行确定。
沿道路2宽度方向的两侧,道路2的两侧设置降水收集设施24和防撞设施25。
降水收集设施24包括排水沟241和边沟242。排水沟241和边沟242沿雨雾测试路段22的宽度方向由内至外依次设置,以充分收集并排出雨雾测试路段22的降水。排水沟241的宽度优选为30cm,并在排水沟241的顶部覆盖铸铁雨水篦子。其中,雨雾测试路段22的宽度方向的内侧为靠近待测车辆1的一侧,外侧为远离待测车辆1的一侧。
防撞设施25沿待测车辆1的行驶方向延伸设置,防撞设施25包括防撞护栏和轮胎墙,防撞护栏位于雨雾测试路段22,轮胎墙位于驶离路段23的减速路段,防撞设施25用于提高测试的安全性。
道路2的两侧还设有雨雾路段标志或雨雾路段标线,以供待测车辆1的机械视觉采集,优选将雨雾路段标志或雨雾路段标线设置在距雨雾测试路段22至少30m的位置处。
上述测试场和测试方法,首先,在真实行驶环境中,机械视觉是智能汽车感知前方路况的基础,当智能汽车行驶在雨雾测试路段22时,其机械视觉采集到的路况信息受限,即摄像头不能满足路线判别的要求,这便考验了智能汽车在雨雾环境下行驶时其车载感知系统能否根据机械视觉采集的现有信息进行智能化分析处理、判断、决策后最终在这一路段安全行驶的能力。而本测试方法所采用的测试场包括道路2、支撑架3、降雨喷头4、降雾喷头5、雨雾控制系统和预警系统,通过雨雾控制系统控制降雨喷头4、降雾喷头5开启以在雨雾测试路段22形成雨雾测试环境,通过多次测试待测车辆1,并在测试结束后,根据待测车辆1机械视觉采集的图像信息查找系统存在的问题并升级系统,多次测试直至待测车辆1的系统能够正确分析路况并制定行车策略。因此,该场景布置配合待测车辆响应,使得本测试方法适用于不同类型的智能车辆,测试结果更加权威和可靠。并且有利于我国根据本发明提供的测试方法制定专业的检测和验收流程,为智能车辆上路行驶提供保障。
实施例2
本实施例是在实施例1的基础上进行设置,测试场还包括数据中心和监控系统,监控系统可根据其具体的尺寸、功能并且在不影响测试的情况下,设置在道路2上或者道路2的周围。
具体地,监控系统包括监控摄像机,监控摄像机用于拍摄待测车辆1的行驶轨迹并形成视频信息,监控摄像机将视频信息发送至数据中心,数据中心监测到待测车辆1出现故障、失控或偏离道路2行驶等非正常行驶时,通知位于待测车辆1内的安全员接管待测车辆1,由安全员驾驶待测车辆1,以提高测试过程的安全性。
实施例3
本实施例是在实施例1的基础上进行设置,测试场还包括预警系统。预警系统可根据其具体的尺寸、功能并且在不影响测试的情况下,设置在道路2上或者道路2的周围。
预紧系统用于监测雨雾测试路段22的路况信息,并在待测车辆1进入至少包括雨雾测试路段22的预定区域时,将路况信息发送至待测车辆1。通过设置预警系统,可监测雨雾测试路段22的路况信息,并将路况信息发送至待测车辆1,使得待测车辆1能准确知晓雨雾测试路段22的路况,以使待测车辆1能够沿雨雾测试路段22继续前行,进而使测试结果能够更加准确地表现待测车辆1对雨雾测试路段22的响应性能。
具体地,路况信息包括雨量信息、雾量信息、避险预警信息、车辆碰撞预警信息、行人穿越预警信息、移动障碍物信息和固定障碍物信息中的一种或多种。其中,移动障碍物包括背景车辆(不参与测试的车辆)和牲畜等可移动的障碍物。固定障碍物为位于待测道路上影响待测车辆正常行驶的固定式障碍物。
更具体地,路况信息还可以包括雨雾区域的长度和宽度。
进一步,待测车辆1响应为:待测车辆1从驶入路段21的起点朝向雨雾测试路段22行驶并进入预定区域时,接收预警系统发出的路况信息并根据机械视觉采集的环境数据,比对车载数据库或云端数据库,制定行车策略,最终安全通过雨雾测试路段22。即在本实施例中,所要监测的智能汽车的响应性能为其行驶经过雨雾测试路段22时,能够制定保持当前速度、减速、刹车、变换车道绕过前方障碍物(如行人)等行车策略,观察待测车辆1能顺利通过雨雾测试路段22时,视为该待测车辆1在雨雾环境下行驶的响应性能达标(合格)。
实施例4
本实施例是在实施例3的基础上进行设置,测试场还包括服务器组件66,雨雾控制系统包括雨量探测器61、雾量探测器、降雨喷雾自控子系统62、车辆驶入探测器和车辆驶离探测器。
雨量探测器61和雾量探测器固定在支撑架3上,雨量探测器61位于降雨喷头4的下方,雾量探测器位于降雾喷头5的下方。雨量探测器61和雾量探测器均分别和降雨喷雾自控子系统62通讯连接。车辆驶入探测器位于驶入路段21的加速路段,车辆驶离探测器位于驶离路段23的减速路段。车辆驶入探测器、车辆驶离探测器均分别和服务器组件66通讯连接,服务器组件66和降雨喷雾自控子系统62通讯连接。降雨喷雾自控子系统62分别和降雨喷头4和降雾喷头5通讯连接。
雨量探测器61用于监测雨量信息,并将雨量信息发送至降雨喷雾自控子系统62。雾量探测器用于监测雾量信息,并将雾量信息发送至降雨喷雾自控子系统62。降雨喷雾自控子系统62用于控制降雨喷头4的启闭、根据规定的降雨量和雨量探测器61发送的实际雨量信息调节降雨喷头4的降雨量、控制降雾喷头5的启闭、根据规定的降雾量和雾量探测器发送的实际雾量信息调节降雾喷头5、以及将降雨量信息和降雾量信息发送至服务器组件66。通过雨量探测器61、雾量探测器分别和降雨喷雾自控子系统62配合使用,以使实际降雨量达到规定的降雨量。
具体地,降雨量包括降雨强度变化范围、降雨均匀度系数和降雨雨滴的粒径。降雾量包括降雾雾滴粒径。
优选地,所规定的降雨量的具体数值如下:
降雨强度变化范围为:15-150mm/h。降雨均匀度系数为:大于0.86。降雨雨滴的粒径为:1.5-5.0mm。其中,雨滴粒径为1.5mm时,为小雨;雨滴粒径为3.2mm时,为中雨;雨滴粒径为5.0mm时,为大雨。
所规定的降雾量的具体数值如下:
降雾雾滴粒径为30μm。
需要说明的是,上述各项数据仅为举例说明,具体数据可以依据实际需求确定。
降雨喷雾自控子系统62调节降雨量的精度为:误差率为3%。
可选地,雨雾控制系统还包括控制台,控制台和降雨喷雾自控子系统62通讯连接,降雨喷雾自控子系统62将降雨量信息和降雾量信息发送至控制台,控制台用于显示降雨量和降雾量的各项数值以及降雨强度变化曲线。
车辆驶入探测器采集到待测车辆1经过时,向服务器组件66发送驶入信息,服务器组件66接收驶入信息后判断是否满足降雨喷头4和降雾喷头5的开启条件,并将判断结果信息发送至降雨喷雾自控子系统62,降雨喷雾自控子系统62根据判断结果信息控制降雨喷头4和降雾喷头5开启。
车辆驶离探测器采集到待测车辆1经过时,向服务器组件66发送驶离信息,服务器组件66接收驶离信息后判断是否满足雨雾喷头关闭条件,并将判断结果信息发送至降雨喷雾自控子系统62,降雨喷雾自控子系统62根据判断结果信息控制降雨喷头4和降雾喷头5关闭。
可选地,若需测试突然下雨时待测车辆1能否安全通过雨雾测试路段22,待测车辆1行驶至距离雨雾测试路段22的前端30m处时,降雨喷雾自控子系统才控制降雨喷头4和降雾喷头5同时开启并形成雨雾测试环境。
具体地,雨量探测器61可以为雨量检测器、雷达65或摄像头。
雾量探测器可以为雾量检测器、雷达65或摄像头。
车辆驶入探测器和车辆驶离探测器优选为红外对射探测器63或雷达65,更优选为同时设置红外对射探测器63和雷达65。当降雨喷雾自控子系统62同时接收到红外对射探测器63和雷达65发送的驶入信息或驶离信息时,降雨喷雾自控子系统62才控制雨雾喷头开启或关闭,避免误触发降雨喷雾自控子系统62,以提高雨雾控制系统的控制精度。
具体地,雨雾控制系统还包括报警主机64,红外对射探测器63通过报警主机64和降雨喷雾自控子系统62通讯连接。
优选地,红外对射探测器63为三光束无线红外对射探测器63,防水等级为IP66,支持开关量和网络输出。雷达65的频率可调,以调整探测距离和精度,其防水等级为IP66,支持开关量和网络输出。
实施例5
在实施例4的测试场和测试方法的基础上,预警系统包括障碍物摄像机71、障碍物探测器72、通信单元74和交换机73。
障碍物摄像机71和障碍物探测器72均设置在雨雾测试路段22上。障碍物摄像机71和障碍物探测器72均分别和服务器组件66通讯连接。服务器组件66依次经交换机73和通信单元74,与待测车辆1的车载单元通讯连接。
障碍物摄像机71用于拍摄路况形成图像信息,并将图像信息发送至服务器组件66。障碍物探测器72用于识别并定位待测车辆1和行人(采用仿真人),并将定位信息发送至服务器组件66。
雨量信息包括降雨量信息和降雾量信息,其预警方式包括固定发报模式和路侧采集模式:
固定发报模式为通过通信单元74将雨量信息发送至待测车辆1的车载单元。固定模式在短时间内持续向待测车辆1发送降雨量信息和降雾量信息,以便于实现车路协同,此模式用于测试通信单元74和待测车辆1的车载单元的通讯连接情况。
路侧采集模式为:雨量探测器61监测雨量信息并将雨量信息反馈至降雨喷雾自控子系统62,降雨喷雾自控子系统62将降雨量信息和降雾量信息依次经服务器组件66、交换机73和通信单元74发送至待测车辆1的车载单元。路侧采集模式能够实时反映真实雨量情况,以综合测试通信单元74与车载单元的通讯连接情况,以及雨量探测器61的检测性能、反应能力等性能。
车辆碰撞预警信息的预警方式为:
多个待测车辆1同时测试时,障碍物探测器72能够将每一待测车辆1的车辆定位信息、车辆型号信息、车辆行驶轨迹信息、车速信息和车灯状态信息中的一种或多种发送至服务器组件66,服务器组件66运算形成车辆碰撞预警信息,并依次经交换机73和通信单元74将车辆碰撞预警信息发送至每一待测车辆1的车载单元,以避免待测车辆1间发生碰撞。
行人穿越预警信息的预警方式为:
行人穿过雨雾环境测试路段时,障碍物探测器72能够识别行人并将行人的行人定位信息、行人行走轨迹信息和行人行走速度信息中的一种或多种发送至服务器组件66,服务器组件66运算形成行人穿越预警信息,并依次经交换机73和通信单元74将行人穿越预警信息发送至待测车辆1,以避免待测车辆1撞击行人。
避险预警信息的预警方式为:
服务器组件66分析前方的待测车辆1处于危险行驶状态时,形成避险预警信息,并依次通过交换机73和通信单元74将避险预警信息发送至后方的待测车辆1的车载单元,以避免待测车辆1间发生碰撞。
优选地,沿待测车辆1的行驶方向间隔设置多个障碍物摄像机71,相邻两个障碍物摄像机71的间距为50米。障碍物摄像机71的防水等级为IP66,支持网络传输,并具有自动雨刷清洁功能和自动除雾功能,适用于雨雾环境下使用。
障碍物探测器72为雷达检测器,包括毫米波雷达检测器、微波雷达检测器、激光雷达检测器和雷视一体机雷达检测器等其他类型的雷达检测器。本实施例优选为全向毫米波雷达,可不受雨水、风沙、雾霾混合光线等环境因素的影响,并可24小时监控,稳定性较高,并能够同时对10个以内的障碍物目标进行跟踪定位。
通信单元74覆盖范围超过500m,延时时间小于20ms,传输接口包括一个电口和一个光口,电口的传输速率为100Mbps或1000Mbps,光口的传输速率为1.25Gbps。
移动障碍物预警系统的预警方式为:
障碍物探测器72能够识别移动障碍物并将移动障碍物的移动障碍物定位信息、移动轨迹信息和速度信息中的一种或多种发送至服务器组件,服务器组件运算形成移动障碍物穿越预警信息,并将移动障碍物穿越预警信息依次经交换机73、通信单元74发送至待测车辆1的车载单元。
固定障碍物预警系统的预警方式为:
雨雾环境测试路段上出现影响待测车辆1正常行驶的固定障碍物时,障碍物探测器72能够识别固定障碍物并将固定障碍物的固定障碍物定位信息发送至服务器组件,服务器组件运算形成固定障碍物预警信息,并将固定障碍物预警信息依次经交换机73、通信单元74发送至待测车辆1的车载单元。
应用该测试场进行测试的过程是:
对测试场进行场景布置,放置好待测车辆1。待测车辆1从驶入路段21的起点朝向雨雾测试路段22行驶,当待测车辆1行驶至与雨雾测试路段22的间距达到可操作性距离时,通信单元74将雨量信息发送至待测车辆1的车载单元。待测车辆1继续向雨雾测试路段22行驶,并实时接收车辆碰撞预警信息、行人穿越预警信息、避险预警信息、移动障碍物预警信息和固定障碍物预警信息中的一种或多种。观察待测车辆1能否安全通过雨雾测试路段22。
实施例6
在实施例3-5的测试场和测试方法的基础上,服务器组件66包括边缘计算服务器和数据中心,边缘计算服务器和数据中心通讯连接。边缘计算服务器用于将接收到的信息运算形成路况信息,并将路况信息发送至待测车辆1,以及将接收到的信息和路况信息发送至数据中心,数据中心用于运算接收到的信息并判断是否和路况信息一致,以提高路况信息的精确性。
或者,服务器组件包括数据中心,数据中心用于将接收到的信息运算形成路况信息。
具体地,边缘计算服务器邻近道路2设置,其接受信息以及将路况信息传输至待测车辆1的车载单元的速度均快于数据中心,但边缘计算服务器的价格远高于数据中心,因此,可根据实际需求确定服务器组件的种类。
实施例7
在实施例3-实施例4的测试场和测试方法的基础上,沿待测车辆1的行驶方向,雨雾测试路段22包括若干个依次连接的降雨分区和若干个依次连接的降雾分区。若干个降雨分区和若干个降雾分区共同覆盖整个雨雾测试路段22。
每一降雨分区包括多个支撑架3,多个支撑架3沿待测车辆1的行驶方向间隔设置,支撑架3的延伸方向垂直于待测车辆1的行驶方向,降雨喷头4沿支撑架3的延伸方向间隔设置在支撑架3上。
具体地,每一降雨喷头4包括若干个不同喷口口径的分降雨喷头。分降雨喷头和降雨喷雾自动子系统62通讯连接,降雨喷雾自动子系统62通过控制不同喷口口径的分降雨喷头的开启,调节降雨雨滴粒径。
每一降雾分区包括多个支撑架3,多个支撑架3沿待测车辆1的行驶方向间隔设置,支撑架3的延伸方向垂直于待测车辆1的行驶方向,降雾喷头5沿支撑架3的延伸方向间隔设置在支撑架3上。
具体地,每一降雾喷头5包括若干个不同喷口口径的分降雾喷头。分降雾喷头和降雨喷雾自动子系统62通讯连接,降雨喷雾自动子系统62通过控制不同喷口口径的分降雾喷头的开启,调节降雾雨滴粒径。
降雾喷头5和降雨喷头4设置在同一支撑架3上。
以雨雾测试路段22的设置长度为200m为例进行说明:
雨雾测试路段22设置4个降雨分区,每一降雨分区的长度为50m,每一降雨分区间隔设置4个支撑架3,相邻两个支撑架3的间距为2m,沿支撑架3的延伸方向,每一支撑架3上间隔设置3个降雨喷头4。
雨雾测试路段22设置两个降雾分区,每一降雾分区的长度为100m,每一降雾分区间隔设置4个支撑架3,相邻两个支撑架3的间隔为4m,沿支撑架啊的延伸方向,每一支撑架3上间隔设置4个降雾喷头5。
通过上述设置,以使雨雾测试路段22的设置长度为200m且宽度为7m时,有效降雨面积和有效降雾面积均分别为1400m
优选地,将降雨喷头4设置在距地面4-5m的位置处,以使降雨高度为4-5m。
需要说明的是,上述设置方式仅为举例说明,具体设置方式根据实际测试要求进行确定,并保证降雨喷头4和降雾喷头5开启时能够覆盖全部雨雾测试路段22即可。
将雨雾测试路段22设置为多个降雨分区和多个降雾分区还具有如下优势:降雨喷雾自控子系统可分区控制降雨分区和降雾分区的开启,以模拟局部降雨时待测车辆1能否安全通过雨雾测试路段2。
具体地,雨雾测试路段22的设置形式包括室内和室外。室内测试时,雨雾测试路段22上架设钢结构通道,支撑架3设置在钢结构通道的顶部。室外测试时,支撑架3为门形框架结构。通过设置上述两种形式的雨雾测试路段22,以增加测试场景,提高测试精度。
实施例8
在实施例3和7的测试场和测试方法的基础上,还包括供水装置,供水装置用于向降雨喷头4和降雾喷头5供水。供水装置包括沉砂池81、过滤池82、清水池83、进水管841、主输水管842、降雨分水管843、降雾分水管844、降雨水泵85、降雾水泵86、主水泵89、主水泵排水阀和降雨排水阀。
沿水的流动方向,沉砂池81、过滤池82和清水池83依次连通。进水管841的一端连通降水收集设施24,以收集雨雾测试路段22的降水,另一端连通沉砂池81。主输水管842的一端连通清水池83,另一端分别和降雨分水管843和降雾分水管844相连通。降雾分水管844和降雾分水管844均设置多个,每一降雾分水管844连通每一降雨分区的降雨喷头4,每一降雾分水管844连通每一降雾分区的降雾喷头5。主输水管842上设置主水泵89和主水泵排水阀,每一降雨分水管843上设置降雨分水泵和降雨排水阀,每一降雾分水管844上设置降雾分水泵。分降雨喷头、主水泵89、降雨分水泵、降雾分水泵、主水泵排水阀和降雨排水阀均分别和降雨喷雾自控子系统62通讯连接。
雨雾测试路段22的降水收集设施24收集雨雾测试路的降水,降水通过进水管841依次流经沉砂池81和过滤池82进入清水池83。沉砂池81用于沉淀雨雾测试路段22的排水,过滤池82用于过滤经沉砂后的排水,清水池83用于存储经过滤后的排水。
当车辆驶入探测器采集到待测车辆1经过,需要开启雨雾环境时,降雨喷雾自控子系统62控制主水泵89、降雨分水泵和降雾分水泵同时开启,清水池83内的排水依次流经主输水管842、降雨分水管843和降雨喷头4以形成降雨,同时,清水池83内的依次流经主输水管842、降雾分水管844和降雾喷头5以形成降雾。
降雨喷雾自控子系统62通过主水泵89、降雨分水泵和降雾分水泵控制每一降雨分区的启闭,以及每一降雾分区的启闭,降雨喷雾自控子系统62还通过主水泵排水阀调节主输水管842的管道压力,以及通过降雨排水阀调节降雨分水管843的管道压力,以相应调节降雨强度。
雨量探测器61监测降雨喷头4的实际降雨量以及降雾喷头5的实际降雾量,并将雨量信息反馈至降雨喷雾自控子系统62,降雨喷雾自控子系统62及时调整实际降雨量和实际降雾量,以提高降雨喷雾自控子系统62的调整精度并保证降雨均匀度。
通过上述设置,本申请的供水装置能够实现自动控制,并通过雨量探测器61的实时监测,保证了自动控制的精度。
当车辆驶离探测器采集到待测车辆1经过,需要关闭雨雾环境时,降雨喷雾自控子系统62控制主水泵89、降雨分水泵和降雾分水泵同时关闭。
综上,本供水装置能够实现对雨雾测试路段22的降水的循环利用,以节约用水并减少成本。
该场景布置配合待测车辆1响应,使得本测试方法适用于不同类型的智能驾驶车辆,标准化对车辆雨雾环境行驶的能力的评价,使得测试结果更加权威和可靠。并且有利于我国根据本发明提供的测试方法制定专业的检测和验收流程,为智能驾驶车辆上路行驶提供保障。
进一步,供水装置还包括电源87和控制台88。降雨喷雾自控子系统62通过控制台88分别和主水泵89、降雨分水泵以及降雾分水泵通讯连接。控制台88还能够显示降雨强度和降雨强度变化曲线。电源87用于为控制台88供电。
优选地,供水装置还包括过滤器,过滤器位于清水池83和主输水管842之间,以进一步过滤清水池83排出的降水。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例动、修改、替换和变型。