滚珠螺杆预压衰退判定方法
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及一种检测方法,特别是涉及一种用于检测滚珠螺杆之预压的方法。
背景技术
目前技术上,滚珠螺杆已广泛地运用于需要精密定位的工具机中,其中滚珠螺杆是利用螺帽通过可滚动的滚珠与螺杆轴螺合而成,并借由螺帽与循环配件(回流配件)中滚珠的滚动来使得螺帽沿螺杆轴直线移动。
然而,随着滚珠螺杆使用时间越长,滚珠螺杆的预压便会逐渐减少,预压的不足则会使得螺帽在往返的移动过程中容易产生前后振动的现象,造成精度降低,而当预压衰退至一定程度,甚至会导致滚珠螺杆产生背隙。
参考中国台湾证书号第TW I653410B号专利,其目地是用于检测滚珠螺杆是否已产生背隙(无预压),而无法得知滚珠螺杆当前是否仅有预压衰退但尚未产生背隙。
发明内容
本发明的目的在于提供一种能判定滚珠螺杆预压是否仅衰退而尚未产生背隙的方法。
本发明的滚珠螺杆预压衰退判定方法,借由一计算机装置来实施,所述计算机装置讯号连接一第一感测单元,所述第一感测单元装设于一滚珠螺杆之一螺帽且邻近所述滚珠螺杆之一循环配件并周期性地传送一相关于所述循环配件中之滚珠振动的振动讯号至所述计算机装置,所述滚珠螺杆预压衰退判定方法包含以下步骤。
步骤(A)是借由所述计算机装置,根据所接收到的至少一振动讯号,获得一对应所述至少一振动讯号的振动时域数据。
步骤(B)是借由所述计算机装置,根据所述振动时域数据,获得至少一笔对应所述振动时域数据的振动子频域数据。
步骤(C)是对于每一振动子频域数据,借由所述计算机装置,根据所述振动子频域数据,获得一相关于所述振动子频域数据的振动特征向量。
步骤(D)是借由所述计算机装置,根据所述振动特征向量、多个振动参考向量及一预压检测范围,获得一预压判定结果。
步骤(E)是借由所述计算机装置,根据所述预压判定结果,判定所述滚珠螺杆之预压是否已衰退。
本发明的滚珠螺杆预压衰退判定方法,步骤(B)还包含以下步骤:
(B-1)借由所述计算机装置,根据所述振动时域数据,进行包络处理,获得已处理的所述振动时域数据;
(B-2)借由所述计算机装置,根据已处理的所述振动时域数据,获得一相关于所述滚珠螺杆移动时之匀速度期间的目标振动时域数据;
(B-3)借由所述计算机装置,根据所述目标振动时域数据,获得所述至少一振动子频域数据。
本发明的滚珠螺杆预压衰退判定方法,步骤(B-3)还包含以下步骤:
(B-3-1)借由所述计算机装置,根据所述目标振动时域数据,获得至少一振动子时域数据;及
(B-3-2)对于每一振动子时域数据,借由所述计算机装置,根据所述振动子时域数据,进行傅立叶变换,获得对应所述振动子时域数据的所述振动子频域数据。
本发明的滚珠螺杆预压衰退判定方法,步骤(D)包含以下步骤:
(D-1)对于每一振动特征向量,借由所述计算机装置,计算所述振动特征向量分别与每一振动参考向量的一第二振动候选距离;
(D-2)对于每一已获得所述第二振动候选距离的振动特征向量,借由所述计算机装置,自所述振动特征向量所对应的所述第二振动候选距离中,获得一对应有最短距离的第二振动目标距离;及
(D-3)借由所述计算机装置,根据所述第二振动目标距离及所述预压检测范围,获得所述预压判定结果。
本发明的滚珠螺杆预压衰退判定方法,在步骤(C)中,每一振动特征向量包含一指示出所对应之振动子频域数据之峰度的峰度特征向量、一指示出所对应之振动子频域数据之最大峰值的最大频域峰值特征向量,及一指示出所对应之振动子频域数据之总能量的总能量特征向量之至少一者。
本发明的滚珠螺杆预压衰退判定方法,所述计算机装置储存有多笔第一训练振动特征向量,及多笔第二训练振动特征向量,在步骤(D)之前,还包含以下步骤:
(F)借由所述计算机装置,根据所述第一训练振动特征向量,利用一非监督式算法,获得处于所对应之数据空间中的所述振动参考向量;及
(G)借由所述计算机装置,根据所述振动参考向量及所述第二训练振动特征向量,获得所述预压检测范围。
本发明的滚珠螺杆预压衰退判定方法,在步骤(F)中,所述非监督式算法包含分群算法,所述振动参考向量包含由分群算法所获得之多个振动群集分别对应之中心的向量。
本发明的滚珠螺杆预压衰退判定方法,在步骤(F)中,所述非监督式算法包含自组织对映算法,所述振动参考向量包含由自组织对映算法所获得之更新次数大于一预设次数的所有神经元所对应之向量。
本发明的滚珠螺杆预压衰退判定方法,步骤(G)还包含以下步骤:
(G-1)对于每一第二训练振动特征向量,借由所述计算机装置,计算所述第二训练振动特征向量分别与每一振动参考向量的一第一振动候选距离;
(G-2)对于每一已获得所述第一振动候选距离的第二训练振动特征向量,借由所述计算机装置,自所述第二训练振动特征向量所对应的所述第一振动候选距离中,获得一对应有最短距离的第一振动目标距离;及
(G-3)借由所述计算机装置,根据所述第一振动目标距离,获得所述预压检测范围。
本发明的滚珠螺杆预压衰退判定方法,所述计算机装置还讯号连接一第二感测单元,所述第二感测单元装设于所述螺帽并周期地传送一相关于所述螺帽相对于所述滚珠螺杆之一螺杆轴之移动方向之惯性力的惯性力讯号至所述计算机装置,在步骤(E)之后,还包含以下步骤:
(H)当判定出所述滚珠螺杆之预压已衰退时,借由所述计算机装置,根据所接收到的至少一惯性力讯号,获得至少一对应所述至少一惯性力讯号的惯性力时域数据;
(I)对于每一惯性力时域数据,借由所述计算机装置,根据所述惯性力时域数据,获得一相关于所述惯性力时域数据的惯性力特征向量;
(J)借由所述计算机装置,根据所述惯性力特征向量、多个惯性力参考向量及一背隙检测范围,获得一背隙判定结果;及
(K)借由所述计算机装置,根据所述背隙判定结果,判定所述滚珠螺杆是否已产生背隙。
本发明的有益效果在于:借由根据所述至少一振动讯号所获得的所述至少一振动特征向量、所述振动参考向量及所述预压检测范围,获得用于判定所述滚珠螺杆之预压是否已衰退的所述预压判定结果,便能检测出所述滚珠螺杆仅有预压衰退而尚未产生背隙之情况。
附图说明
本发明的其他的特征及功效,将于参照图式的实施方式中清楚地呈现,其中:
图1是一方块图,说明执行本发明滚珠螺杆预压衰退判定方法的一实施例的一滚珠螺杆预压衰退判定系统;
图2是一示意图,说明所述实施例之一第一感测单元、一第二感测单元及一滚珠螺杆;
图3是一流程图,说明所述实施例的一预压训练程序;
图4是一流程图,说明所述实施例的一背隙训练程序;
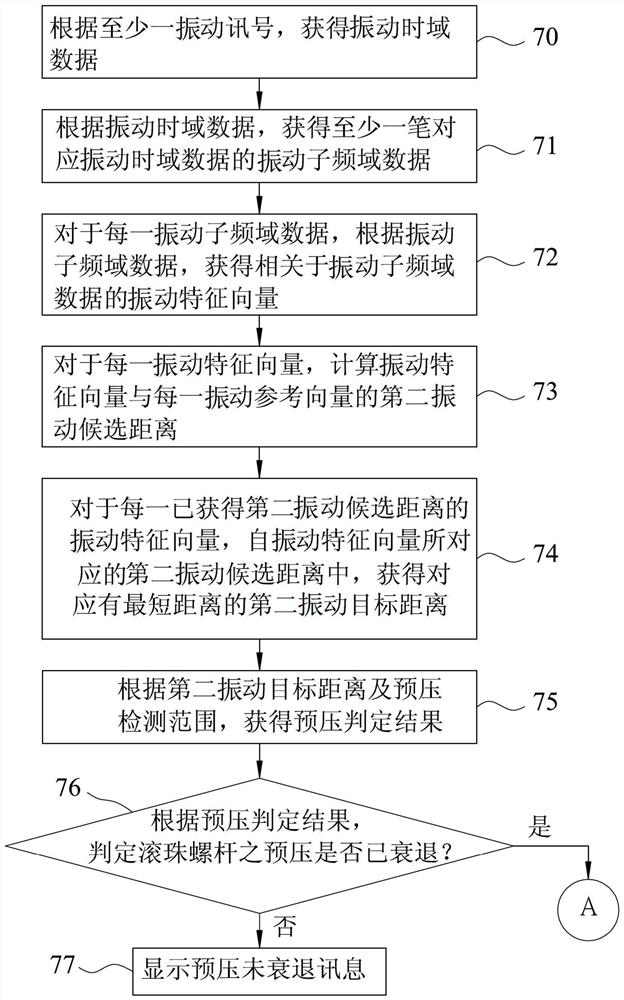
图5是一流程图,说明所述实施例之一预压判定程序的步骤70~77;
图6是一流程图,说明所述实施例之所述预压判定程序的步骤78~85;
图7是一流程图,说明所述实施例之所述预压判定程序如何获得振动子频域数据;及
图8是一流程图,说明所述实施例之所述预压判定程序如何获得惯性力特征向量。
具体实施方式
在本发明被详细描述之前,应当注意在以下的说明内容中,类似的组件是以相同的编号来表示。
参阅图1,本发明滚珠螺杆预压衰退判定方法的一实施例是借由一滚珠螺杆预压衰退判定系统100来实施,所述滚珠螺杆预压衰退判定系统100包含一计算机装置1、一讯号连接所述计算机装置1的第一感测单元2,以及一讯号连接所述计算机装置1的第二感测单元3。
参阅图1、2,所述第一感测单元2装设于一滚珠螺杆4之一螺帽41且邻近所述滚珠螺杆4之一循环配件43并周期性地传送一相关于所述循环配件43中之滚珠44振动的振动讯号至所述计算机装置1。所述第二感测单元3装设于所述螺帽41并周期地传送一相关于所述螺帽41相对于所述滚珠螺杆之一螺杆轴42之移动方向之惯性力的惯性力讯号至所述计算机装置1。
值得特别说明的是,使用者亦可根据不同种类的滚珠螺杆(图2仅揭示外循环式滚珠螺杆),将所述第一感测单元2与所述第二感测单元3安装各种类滚珠螺杆4各自所对应的位置(表示根据不同种类的滚珠螺杆4亦可能将所述第一感测单元2与所述第二感测单元3安装于同一位置),以获得相关于循环配件43中之滚珠44振动的振动讯号与相关于螺帽41相对于滚珠螺杆42之螺杆轴之移动方向之惯性力的惯性力讯号。
所述计算机装置1包含一讯号连接所述第一感测单元2与所述第二感测单元3的通讯模块11、一储存模块12、一显示模块13,以及一电连接所述通讯模块11与所述储存模块12与所述显示模块13的处理模块14。
在本实施例中,所述计算机装置1之实施态样例如为一个人计算机、一服务器或一云端主机,但不以此为限。
在本实施例中,所述第一感测单元2与所述第二感测单元3之实施态样为一加速规(Accelerometer),但不以此为限,于其他实施例中亦可为位移计或是速度计。进一步来说,所述第一感测单元2的有效带宽需涵盖0.1~5Hz,而所述第二感测单元3的有效带宽需涵盖螺杆轴42转速频之10倍带宽内(例如:0.1~250Hz),且数字分辨率为20bit。
所述储存模块12储存有多笔第一训练振动特征向量、多笔第二训练振动特征向量、多笔第一训练惯性力特征向量,及多笔第二训练惯性力特征向量。其中,每一训练振动特征向量包含一指示出所述训练振动特征向量所对应之频域数据之峰度(Kurtosis)的训练峰度特征向量、一指示出所述训练振动特征向量所对应之频域数据之最大峰值的训练最大频域峰值特征向量,及一指示出所述训练振动特征向量所对应之频域数据之总能量的训练总能量特征向量之至少一者,但不以上述为限。其中,每一训练惯性力特征向量包含一指示出所述训练惯性力特征向量所对应之时域数据之峰峰值(peak-peak)的训练峰峰值特征向量、一指示出所述训练惯性力特征向量所对应之时域数据之最大峰值的训练最大时域峰值特征向量,及一指示出所述训练惯性力特征向量所对应之时域数据之最大峰值之绝对值与最小峰值之绝对值的总和取平均的训练平均峰值特征向量之至少一者,但不以上述为限。
以下将借由本发明滚珠螺杆预压衰退判定方法之所述实施例来说明所述滚珠螺杆预压衰退判定系统100之所述计算机装置1、所述第一感测单元2,及所述第二感测单元3各组件的运作细节,本发明滚珠螺杆预压衰退判定方法包含一预压训练程序、一背隙训练程序,以及一预压判定程序。
参阅图3,所述预压训练程序包含步骤50~步骤53。
在步骤50中,所述处理模块14根据所述第一训练振动特征向量,利用一非监督式算法,获得多个处于所对应之数据空间中的振动参考向量。进一步来说,当所述非监督式算法包含分群算法(例:K-mean)时,所述振动参考向量包含由分群算法所获得之多个振动群集分别对应之中心的向量;而当所述非监督式算法包含自组织对映算法(SOM,Self-Organizing Map)时,所述振动参考向量包含由自组织对映算法所获得之更新次数大于一预设次数的所有神经元所对应之向量,但不以上述例子为限。
在步骤51中,对于每一第二训练振动特征向量,所述处理模块14计算所述第二训练振动特征向量分别与每一振动参考向量的一第一振动候选距离。进一步来说,计算每一第一振动候选距离是使用欧氏距离,但不以此为限。
在步骤52中,对于每一已获得所述第一振动候选距离的第二训练振动特征向量,所述处理模块14自所述第二训练振动特征向量所对应的所述第一振动候选距离中,获得一对应有最短距离的第一振动目标距离。
在步骤53中,所述处理模块14根据所述第一振动目标距离,获得一预压检测范围。进一步来说,本实施例是将所述第一振动目标距离作为常态分布(Normal Distribution),并将所述第一振动目标距离所对应的95%信赖区间(CI,Confidence interval)作为所述预压检测范围,但不以此为限。
参阅图4,所述背隙训练程序包含步骤60~步骤63。
在步骤60中,所述处理模块14根据所述第一训练惯性力特征向量,利用另一非监督式算法,获得多个处于所对应之数据空间中的惯性力参考向量。进一步来说,当所述另一非监督式算法包含分群算法时,所述惯性力参考向量包含由分群算法所获得之多个惯性力群集分别对应之中心的向量;而当所述另一非监督式算法包含自组织对映算法时,所述惯性力参考向量包含由自组织对映算法所获得之更新次数大于另一预设次数的所有神经元所对应之向量,但不以上述例子为限。
在步骤61中,对于每一第二训练惯性力特征向量,所述处理模块14计算所述第二训练惯性力特征向量分别与每一惯性力参考向量的一第一惯性力候选距离。进一步来说,计算每一第一惯性力候选距离是使用欧氏距离,但不以此为限。
在步骤62中,对于每一已获得所述第一惯性力候选距离的第二训练惯性力特征向量,所述处理模块14自所述第二训练惯性力特征向量所对应的所述第一惯性力候选距离中,获得一对应有最短距离的第一惯性力目标距离。
在步骤63中,所述处理模块14根据所述第一惯性力目标距离,获得一背隙检测范围。进一步来说,本实施例是将所述第一惯性力目标距离作为常态分布,并将所述第一惯性力目标距离所对应的95%信赖区间作为所述背隙检测范围,但不以此为限。
参阅图5、6,所述预压判定程序包含步骤70~步骤85。
在步骤70中,所述处理模块14根据所接收到的至少一振动讯号,获得一对应所述至少一振动讯号的振动时域数据。
在步骤71中,所述处理模块14根据所述振动时域数据,获得至少一笔对应所述振动时域数据的振动子频域数据。
参阅图7,值得特别说明的是,步骤71还进一步包含步骤710~步骤714。
在步骤710中,所述处理模块14根据所述振动时域数据,进行包络处理(Envelope),获得已处理的所述振动时域数据。其中,包络处理为习知技术亦非本发明重点,故不多作阐述。
在步骤711中,所述处理模块14根据已处理的所述振动时域数据,获得一相关于所述滚珠螺杆4移动时之匀速度期间的目标振动时域数据。进一步来说,所述滚珠螺杆4移动时之匀速度期间亦可由预先设定之控制所述滚珠螺杆4移动之马达转速而得知。
在步骤712中,所述处理模块14根据所述目标振动时域数据,获得至少一振动子时域数据。进一步来说,所述处理模块14是依据预先设定之相同长度的时间区间,将所述目标振动时域数据进行切割,以获得所述至少一振动子时域数据,而每一振动子时域数据皆对应有相同长度的时间区间。反之,在其他实施例中,可根据不同的已处理的振动时域数据,取各自的匀速度段,获得多笔目标振动时域数据,所述处理模块14亦可根据多笔目标振动时域数据,依据预先设定之相同长度的另一时间区间,将所述目标振动时域数据进行结合,以获得至少一另一振动子时域数据,而每一另一振动子时域数据皆对应有相同长度的另一时间区间。
在步骤713中,对于每一振动子时域数据,所述处理模块14根据所述振动子时域数据,进行带通滤波(Band Pass Filter),获得已滤波的所述振动子时域数据。进一步来说,已滤波的所述振动子时域数据所保留之频率范围为螺杆轴42转速频之10倍带宽内,因此,当所述第一感测单元2所能感测的频率范围刚好仅涵盖螺杆轴42转速频之10倍带宽内时,则无需进行步骤713所述之带通滤波,直接进行步骤714。
在步骤714中,对于每一已滤波的振动子时域数据,所述处理模块14根据已滤波的所述振动子时域数据,进行傅立叶变换(Fourier Transform),获得对应已滤波的所述振动子时域数据的所述振动子频域数据。
在步骤72中,对于每一振动子频域数据,所述处理模块14根据所述振动子频域数据,获得一相关于所述振动子频域数据的振动特征向量。其中,每一振动特征向量包含一指示出所述振动特征向量所对应之振动子频域数据之峰度的峰度特征向量、一指示出所述振动特征向量所对应之振动子频域数据之最大峰值的最大频域峰值特征向量,及一指示出所述振动特征向量所对应之振动子频域数据之总能量的总能量特征向量之至少一者,但不以上述为限。
在步骤73中,对于每一振动特征向量,所述处理模块14计算所述振动特征向量分别与每一振动参考向量的一第二振动候选距离。
在步骤74中,对于每一已获得所述第二振动候选距离的振动特征向量,所述处理模块14自所述振动特征向量所对应的所述第二振动候选距离中,获得一对应有最短距离的第二振动目标距离。
在步骤75中,所述处理模块14根据所述第二振动目标距离及用于判定所述振动特征向量是否指示出所述滚珠螺杆4之预压已衰退的所述预压检测范围,获得所述预压判定结果。举例来说,所述处理模块14是将所述第二振动目标距离取平均,以获得一振动平均数,并判定所述振动平均数是否位于所述预压检测范围内,以作为所述预压判定结果;又或是,根据所述第二振动目标距离取众数,以获得一振动众数,并判定所述振动众数是否位于所述预压检测范围内,以作为所述预压判定结果,但不以上述算法为限。
在步骤76中,所述处理模块14根据所述预压判定结果,判定所述滚珠螺杆4之预压是否已衰退。当判定出所述滚珠螺杆4之预压未衰退(例:所述振动平均数字于所述预压检测范围内)时,进行流程步骤77;当判定出所述滚珠螺杆4之预压已衰退(例:所述振动平均数字于所述预压检测范围外)时,进行流程步骤78。
在步骤77中,所述处理模块14产生一指示出所述滚珠螺杆4之预压未衰退的预压未衰退讯息,并将所述预压未衰退讯息显示于所述显示模块13。
在步骤78中,所述处理模块14根据所接收到的至少一惯性力讯号,获得至少一对应所述至少一惯性力讯号的惯性力时域数据。其中,每一笔惯性力时域数据皆对应所述滚珠螺杆4之螺帽41相对于螺杆轴42的一往返周期,每一往返周期是指所述螺帽41从所述螺杆轴42的一初始位置开始移动至一终点位置,再自所述终点位置回到所述初始位置的周期。较佳地,每一惯性力时域数据亦可仅涵盖所述滚珠螺杆4所对应之往返周期的加速度(减速度)期间。
在步骤79中,对于每一惯性力时域数据,所述处理模块14根据所述惯性力时域数据,获得一相关于所述惯性力时域数据的惯性力特征向量。其中,每一惯性力特征向量包含一指示出所述惯性力特征向量所对应之惯性力时域数据之峰峰值的峰峰值特征向量、一指示出所述惯性力特征向量所对应之惯性力时域数据之最大峰值的最大时域峰值特征向量,及一指示出所述惯性力特征向量所对应之惯性力时域数据之最大峰值之绝对值与最小峰值之绝对值的总和取平均的平均峰值特征向量之至少一者,但不以上述为限。
参阅图8,值得特别说明的是,步骤79还进一步包含步骤790~步骤792。
在步骤790中,对于每一惯性力时域数据,所述处理模块14根据所述惯性力时域数据,进行包络处理,获得已处理的所述惯性力时域数据。
在步骤791中,对于每一已处理的所述惯性力时域数据,所述处理模块14根据已处理的所述惯性力时域数据,进行低通滤波(Low-pass Filter),获得一对应已处理之所述惯性力时域数据的已滤波的所述惯性力时域数据。进一步来说,已滤波的所述惯性力时域数据所保留之频率范围为0.1~5Hz带宽,因此,当所述第二感测单元3所能感测的频率范围刚好仅涵盖0.1~5Hz带宽时,则无需进行步骤791所述之低通滤波,直接进行步骤792。
在步骤792中,对于每一已滤波的所述惯性力时域数据,所述处理模块14根据已滤波的所述惯性力时域数据,获得对应已滤波之所述惯性力时域数据的所述惯性力特征向量。
在步骤80中,对于每一惯性力特征向量,所述处理模块14计算所述惯性力特征向量分别与每一惯性力参考向量的一第二惯性力候选距离。
在步骤81中,对于每一已获得所述第二惯性力候选距离的惯性力特征向量,所述处理模块14自所述惯性力特征向量所对应的所述惯性力候选距离中,获得一对应有最短距离的第二惯性力目标距离。
在步骤82中,所述处理模块14根据所述第二惯性力目标距离及用于判定所述惯性力特征向量是否指示出所述滚珠螺杆4已产生背隙的所述背隙检测范围,获得所述背隙判定结果。举例来说,所述处理模块14是将所述第二惯性力目标距离取平均,以获得一惯性力平均数,并判定所述惯性力平均数是否位于所述背隙检测范围内,以作为所述背隙判定结果;又或是,根据所述第二惯性力目标距离取众数,以获得一惯性力众数,并判定所述惯性力众数是否位于所述背隙检测范围内,以作为所述背隙判定结果,但不以上述算法为限。
在步骤83中,所述处理模块14根据所述背隙判定结果,判定所述滚珠螺杆4是否已产生背隙。当判定出所述滚珠螺杆4未产生背隙(例:所述惯性力平均数字于所述背隙检测范围内)时,进行流程步骤84;当判定出所述滚珠螺杆4已产生背隙(例:所述惯性力平均数字于所述背隙检测范围外)时,进行流程步骤85。
在步骤84中,所述处理模块14产生一指示出所述滚珠螺杆4之预压已衰退但未产生背隙的仅预压衰退讯息,并将所述仅预压衰退讯息显示于所述显示模块13。
在步骤85中,所述处理模块14产生一指示出所述滚珠螺杆4之已产生背隙的背隙已产生讯息,并将所述背隙已产生讯息显示于所述显示模块13。
综上所述,本发明滚珠螺杆预压衰退判定方法,借由用于判定所述滚珠螺杆4之预压是否已衰退的所述预压判定结果,以及用于判定所述滚珠螺杆4之是否已产生背隙的所述背隙判定结果,便能检测出所述滚珠螺杆4之预压为未衰退、仅衰退但尚未产生背隙,或是已产生背隙等三种情况,故确实能达成本发明的目的。
惟以上所述者,仅为本发明的实施例而已,当不能以此限定本发明实施的范围,凡是依本发明申请专利范围及专利说明书内容所作的简单的等效变化与修饰,皆仍属本发明专利涵盖的范围内。