一种医用显示器的可视角检测方法和装置
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及一种医用显示器的可视角检测方法和装置,属于仪器的光学检测的技术领域。
背景技术
随着医疗行业高质量发展的不断推进,各级医院的数字化进程得到了有效推动,数字化医用显示器(PACS)的普及率逐年攀高。包括超声、DR、CT、MRI等多种医学影像诊断仪器,都会配备专业的医用显示器作为PACS系统的终端呈现设备,当前医学影像诊断的准确性和可靠性,在很大程度上依赖于医用显示器所呈现医学影像的质量。医用显示器在手术室、多专家会诊等临床使用场合中越来越常见,因此对可视角参数的要求也日益被重视。
已发布的国家校准规范JJF 1746-2019《医学影像诊断显示系统校准规范》中将可视角列为重要计量参数之一,提出了水平可视角和垂直可视角均不小于150°的参考指标。现有的可视角检测装置主要有导轨型和转台型两种,体积和重量均不适合开展现场检测,并且在医用显示器没有旋屏功能的情况下无法开展垂直可视角的检测,而在实际校准工作开展时,可视角参数的测量也是最为费时费力的一项。因此,针对医用显示器的可视角参数开展快速高效的自动检测,开发一套可用于现场校准工作的测量装置,是当前医学计量领域中一项有实际需求的研究工作。
专利文献CN107463789A,提供了一种集成化的医用显示器自动校准装置。亮度计和色度计被固定在旋转台和平衡支撑机构上,平衡支撑机构沿着导轨前后、左右、上下移动。这种校准装置体积大,只适合在固定场所使用。而且当显示器平面不垂直于桌面时,难以实施校准。现有设计均不适合开展医用显示器的现场校准工作,尤其是可视角检测装置的搭建,相对比较繁琐,对医用显示器本身的尺寸和底座形状均有一定的要求,这就限制了其使用范围。同时,医用显示器高分辨率液晶屏属于易碎品,在送检实验室的过程中对运输要求较高,加上医用显示器是各个医学影像设备不可或缺的终端显示部分,送检实验室的时效性也很难满足医院的临床需求。
发明内容
本发明的目的在于提供一种医用显示器可视角参数检测方法和装置,解决当前医用显示器无法现场校准的问题,满足医用显示器国家校准规范对于可视角参数相应技术指标的要求。
实现本发明目的的技术解决方案为:
一种医用显示器的可视角检测方法,包括以下操作步骤:
步骤1:在医用显示器的中心区域显示图像靶标,通过手眼标定获得摄像机像素坐标与机械臂空间坐标之间的转换关系,将显示器坐标系转换至机械臂坐标系下;
步骤2:利用手眼标定获得的转换关系计算出机械臂坐标系下的靶标位姿,由机械臂运动解算控制器将得到的位姿信息通过机器人逆运动学解算变为具体的输出信号,驱动机械臂末端向显示器中心移动;
步骤3:通过摄像机获取靶标图像后计算出图像中心与标靶中心的位置误差,以其为控制条件驱动机械臂进行移动,补偿步骤2中基于位置的视觉伺服定位过程中因标定精度和坐标转换引入的误差;
步骤4:完成机械臂末端相对于显示器中心区域的垂直定位后,计算规划出机械臂末端的运动轨迹:以显示器的中心点为球心,初始位置亮度计距离显示器中心点的距离为半径,分别向竖直上下、水平左右四个方向延伸;
步骤5:以亮度计垂直于显示器正中区域作为起始位置,按照步骤4规划的轨迹,机械臂末端所持亮度计沿轨迹以1°角度分别向水平左右和竖直上下四个方向步进移动,移动过程中亮度计始终对准显示器中心,每移动1°角度后,读取一次显示器100%全白场与0%全黑场的光亮度测量值,计算得出该位置的光亮度比;
步骤6:在向每个方向移动的过程中,当该位置的光亮度比小于10时,则停止继续移动,并驱动机械臂回归至垂直于显示器中心的初始位置;
步骤7:按水平左右两个方向轨迹移动所测得的角度之和为水平可视角,按竖直上下两个方向轨迹移动所测得的角度之和为垂直可视角。
进一步的,在步骤1前还进行了步骤a1,步骤a1:将摄像机(2)和亮度计(3)固定在机械臂末端,机械臂通过支架或底盘固定于医用显示器的前面,机械臂末端所持亮度计能够以医用显示器的中心为圆心,沿着医用显示器的水平和竖直方向的圆弧轨迹移动。
进一步的,所述步骤1的具体过程为:
以摄像机的光心建立摄像机坐标系,在图像靶标上建立世界坐标系,世界坐标系Z轴垂直于医用显示器,采集的图像中包含图像靶标的特征信息,图像靶标的特征点在世界坐标系下的坐标是已知的,根据特征点在世界坐标系与摄像机坐标系的关系,得到:
上式是摄像机坐标系的转换关系式,
进一步的,所述步骤2中计算出机械臂坐标系下的靶标位姿具体过程为:
采集不同位姿下的图像靶标进行机械臂的手眼定位工作,图像靶标放在机械臂前方固定不动,不断改变机械臂的位姿以采集不同相对位姿的图像靶标,根据图像靶标与摄像机的位姿关系,以及采集每一张图像靶标时机械臂的末端位姿,计算出图像靶标相对于机械臂坐标系的位置。
进一步的,所述步骤3计算图像中心与标靶中心的位置误差的具体过程为:
设摄像机坐标系为
由上式可得:
式中,
则公式写成:
上式为手眼标定的基本方程,手眼标定的位姿求解过程就是根据多组机械臂位姿得到多个基本方程,从而求解矩阵
一种医用显示器的可视角检测装置,包括机械臂、摄像机和亮度计,所述摄像机和亮度计固定于机械臂的活动末端,且所述摄像机和亮度计相互平行,均与机械臂的活动末端的旋转轴的轴向垂直。
进一步的,所述机械臂为六轴机械臂,包括顺次连接的能够围绕各自中心轴360°旋转的第一转臂、第二转臂、第三转臂、第四转臂、第五转臂和第六转臂;
所述第一转臂竖直设置于安装台上,第一转臂的中轴线与安装台所在平面垂直,所述安装台设置于支架或底盘上;
所述第一转臂和第二转臂连接,其中轴线相互垂直;
所述第二转臂和第三转臂之间连接有臂杆a,所述臂杆a与第二转臂和第三转臂的中轴线分别垂直,第二转臂和第三转臂的中轴线平行,第二转臂自转时,臂杆a围绕第二转臂的中轴线旋转,臂杆a带着第三转臂同步移动;
所述第三转臂和第四转臂之间连接有臂杆b,臂杆b与第三转臂和第四转臂的中轴线分别垂直,第三转臂和第四转臂的中轴线平行,所述第三转臂的轴线一端设置有向前延伸的L形过渡板,L形过渡板的一边与第三转臂的端面固定,另一边与第三转臂的中轴线平行,与臂杆b的首端固定,臂杆b的尾端连接第四转臂的轴向外壁;
所述第四转臂和第五转臂连接,其中轴线相互垂直;
所述第五转臂和第六转臂连接,其中轴线相互垂直;
所述第六转臂为活动末端,所述亮度计设置于第六转臂的轴向中心上方,且亮度计与第六转臂平行,所述摄像机设置于亮度计顶部,摄像机和亮度计的中轴线共面。
进一步的,所述第一转臂、第二转臂、第三转臂、第四转臂、第五转臂和第六转臂内部均设置有独立控制的伺服电机和通讯模块,用于及时反馈对应转臂的位资,以及接收伺服电机的控制指令。
进一步的,所述底盘呈矩形,其底面靠近四个拐角的位置均设置有吸盘,吸盘呈空腔结构,吸盘的侧壁贯通连接有抽真空管。
本发明与现有技术相比,其显著优点是:
本发明可实现医用显示器可视角度检测的现场自动化检测。无需复杂的定位调校过程,通过机器视觉完成手眼标定后自动规划出机械臂末端的移动路径,并确保亮度计中轴延长线在检测过程中始终对准显示器中心区域。此外,当前医用显示器运输至实验室检测非常不方便,成本高风险大,采用本发明方案能够实现在用户使用场所开展现场检测,极大提升了检测质量和工作效率。
附图说明
图1为本发明的原理流程图,
图2为本发明机械臂位姿算法流程图,
图3为本发明机械臂标定的流程示意图,
图4为本发明机械臂标定的坐标系示意图,
图5为本发明机械臂正对医用显示器的示意图,
图6为本发明机械臂旋转到医用显示器左侧的示意图,
图7为本发明机械臂旋转到医用显示器右侧的示意图,
1—医用显示器,2—摄像机,3—亮度计,4—第六机械臂,5—第五机械臂,6—第四机械臂,7—第三机械臂,8—第二机械臂,9—第一机械臂,10—底座,11—吸盘,12—抽真空管,13—安装台。
具体实施方式
下面结合附图及具体实施例对本发明做进一步的介绍。
光亮度比按照如下公式计算:
计算亮度计在每个角度处测量到的光亮度比,并且与0°角,即垂直于显示器幕的光亮度比进行比较,如果大于1.0或其他值,则认为满足可视角要求。
在进行可视角检测时,将亮度计垂直对准显示器中心时作为起始位置,记为0°。将光亮度设置为生产厂商推荐的校准光亮度值;若无推荐值,则设置光亮度值为显示器能够调节到最大光亮度值的60%。以水平可视角为例,亮度计需要从起始位置开始沿同一水平面向左、向右共圆心旋转至与显示器屏幕平行。即亮度计中轴延长线始终对准显示器中心区域,向显示器左侧以及右侧呈弧形运动并保持距离显示器中心距离恒定。类似地,对于垂直可视角,亮度计需要从起始位置开始沿同一水平面向上、向下共圆心旋转至与显示器屏幕平行。
本发明的目的在于,如何方便地在现场实现亮度计的上述移动,由此实现医用显示器可视角度监测的自动化;且实现在亮度计旋转移动过程中,每隔1°测量显示器的光亮度比,提高检测的准确度。
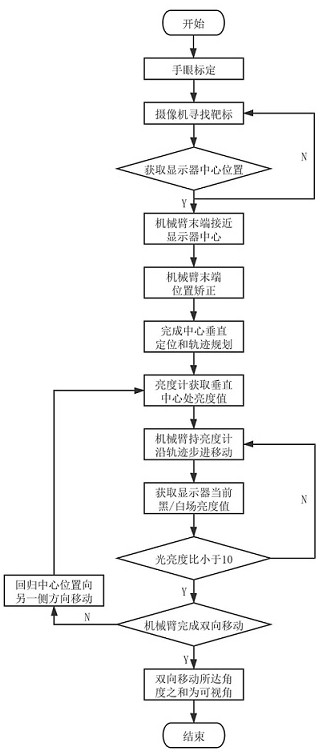
结合图1可见,本专利的具体检测过程为:
步骤1:在医用显示器1的中心区域显示图像靶标,通过手眼标定获得摄像机像素坐标与机械臂空间坐标之间的转换关系,将显示器坐标系转换至机械臂坐标系下;
步骤2:利用手眼标定获得的转换关系计算出机械臂坐标系下的靶标位姿,由机械臂运动解算控制器将得到的位姿信息通过机器人逆运动学解算变为具体的输出信号,驱动机械臂末端向显示器中心移动;
步骤3:通过摄像机获取靶标图像后计算出图像中心与标靶中心的位置误差,以其为控制条件驱动机械臂进行移动,补偿步骤2中基于位置的视觉伺服定位过程中因标定精度和坐标转换引入的误差;
步骤4:完成机械臂末端相对于显示器中心区域的垂直定位后,计算规划出机械臂末端的运动轨迹:以显示器的中心点为球心,初始位置亮度计距离显示器中心点的距离为半径,分别向竖直上下、水平左右四个方向延伸;
步骤5:以亮度计垂直于显示器正中区域作为起始位置,按照步骤4规划的轨迹,机械臂末端所持亮度计沿轨迹以1°角度分别向水平左右和竖直上下四个方向步进移动,移动过程中亮度计始终对准显示器中心,每移动1°角度后,读取一次显示器100%全白场与0%全黑场的光亮度测量值,计算得出该位置的光亮度比;
步骤6:在向每个方向移动的过程中,当该位置的光亮度比小于10时,则停止继续移动,并驱动机械臂回归至垂直于显示器中心的初始位置;
步骤7:按水平左右两个方向轨迹移动所测得的角度之和为水平可视角,按竖直上下两个方向轨迹移动所测得的角度之和为垂直可视角。
参见图2,本发明机械臂位姿算法过程为:采集不同位姿下的图像靶标进行机械臂的手眼定位工作,图像靶标放在机械臂前方固定不动,不断改变机械臂的位姿以采集不同相对位姿的图像靶标,根据图像靶标与摄像机的位姿关系,以及采集每一张图像靶标时机械臂的末端位姿,计算出图像靶标相对于机械臂坐标系的位置。
图2中的视觉伺服系统可采用摄像机,摄像机实时拍摄显示器上的标定图案(图像靶标),由此来实时定位摄像机和亮度计相对于显示器的位姿(因为摄像机和亮度计是相对固定的,所以有了摄像机的位姿,就可以直接得到亮度计相对于显示器屏幕的位姿),控制系统基于亮度计的实时位姿,然后控制机械臂的移动,使亮度计步进地旋转,每次旋转1度,并且要求确保亮度计的移动轨迹在垂直于显示器屏幕的同心平面内(包括左右方向的水平垂直面,和/或,上下方向的竖直垂直面)。显示器交替显示白场和黑场图像,当达到目标位置时,利用机器视觉驱动亮度计捕捉白场和黑场图像的亮度信息,计算得出光亮度比。例如水平向左偏转50度时,亮度比满足测定要求,达到51度时,亮度比超过测定要求;水平向右偏转45度获得满足测定要求的亮度比,则该显示器水平方向的可视角即为95度。由此,完成在每个步进点处测量光亮度比的过程。同理垂直方向向上和向下偏转测量即可。
参见图3,本发明机械臂标定过程为:设摄像机坐标系为
由上式可得:
式中,
则公式写成:
上式为手眼标定的基本方程,手眼标定的位姿求解过程就是根据多组机械臂位姿得到多个基本方程,从而求解矩阵
参见图4-6,医用显示器的可视角检测装置,包括机械臂、摄像机2和亮度计3,摄像机2和亮度计3固定于机械臂的活动末端,且摄像机2和亮度计3相互平行,均与机械臂的活动末端的旋转轴的轴向垂直。
机械臂为六轴机械臂,包括顺次连接的能够围绕各自中心轴360°旋转的第一转臂9、第二转臂8、第三转臂7、第四转臂6、第五转臂5和第六转臂4;
第一转臂9竖直设置于安装台13上,第一转臂9的中轴线与安装台13所在平面垂直,安装台13设置于支架或底盘上;
第一转臂9和第二转臂8连接,其中轴线相互垂直;
第二转臂8和第三转臂7之间连接有臂杆a,臂杆a与第二转臂8和第三转臂7的中轴线分别垂直,第二转臂8和第三转臂7的中轴线平行,第二转臂8自转时,臂杆a围绕第二转臂8的中轴线旋转,臂杆a带着第三转臂7同步移动;
第三转臂7和第四转臂6之间连接有臂杆b,臂杆b与第三转臂7和第四转臂6的中轴线分别垂直,第三转臂7和第四转臂6的中轴线平行,第三转臂7的轴线一端设置有向前延伸的L形过渡板,L形过渡板的一边与第三转臂7的端面固定,另一边与第三转臂7的中轴线平行,与臂杆b的首端固定,臂杆b的尾端连接第四转臂6的轴向外壁;
第四转臂6和第五转臂5连接,其中轴线相互垂直;
第五转臂5和第六转臂4连接,其中轴线相互垂直;
第六转臂4为活动末端,亮度计3设置于第六转臂4的轴向中心上方,且亮度计3与第六转臂4平行,摄像机2设置于亮度计3顶部,摄像机2和亮度计3的中轴线共面。
第一转臂9、第二转臂8、第三转臂7、第四转臂6、第五转臂5和第六转臂4内部均设置有独立控制的伺服电机和通讯模块,用于及时反馈对应转臂的位资,以及接收伺服电机的控制指令。
给出底盘10的一个具体实施例,底盘10呈矩形,其底面靠近四个拐角的位置均设置有吸盘11,吸盘11呈空腔结构,吸盘11的侧壁贯通连接有抽真空管12。使用时,将医用显示器1摆放在机械臂的前方,底盘吸附在桌面上,吸盘底部贴于桌面,通过抽真空管连接抽吸泵,形成吸盘内部负压,吸盘11稳固吸附与桌面,底盘固定,机械臂在使用过程中,不会有位移偏差。
本发明装置使用前,首先将机械臂于医用显示器正前方合适位置进行固定,然后,利用本专利方法,标定机械臂、医用显示器和摄像机的相对坐标,标定完成后,自动规划机械臂经过的各路径点,通过控制机械臂的各个转臂来实现步进旋转,精准控制摄像机的移动轨迹。