差动制动增加闪避操纵横向能力
文献发布时间:2023-06-19 19:23:34
技术领域
本公开一般涉及的领域包括转向、制动和推进系统。
背景技术
车辆典型地包括转向系统,包括电动动力转向系统。
发明内容
多个变型可以包括一种系统和方法,该系统和方法包括:(包括使用至少一个电子处理器)向车辆的道路轮施加差动制动,以增加闪避操纵横向能力。
多个变型可以包括一种系统和方法,该系统和方法包括:(包括使用至少一个电子处理器)向车辆的道路轮施加差动制动,以在电动动力转向系统已经出现故障时增加闪避操纵横向能力。
多个变型可以包括一种系统和方法,该系统和方法包括:(包括使用至少一个电子处理器)向车辆的道路轮施加差动制动,以在电动动力转向操作时增加闪避操纵横向能力。
多个变型可以包括一种系统和方法,该系统和方法包括:(包括使用至少一个电子处理器)向车辆的道路轮施加差动制动力,以在电动动力转向操作、失灵或部分操作或已经出现故障时增加闪避操纵横向能力。
根据下文提供的详细描述,本发明范围内的其他说明性变型应当变得显而易见。应当理解的是,详细描述和具体示例尽管公开了本发明的变型,但是仅旨在处于说明的目的,并且不旨在限制本发明的范围。
附图说明
从详细描述和附图中,应当更充分地理解本发明范围内的变型的选择示例,其中:
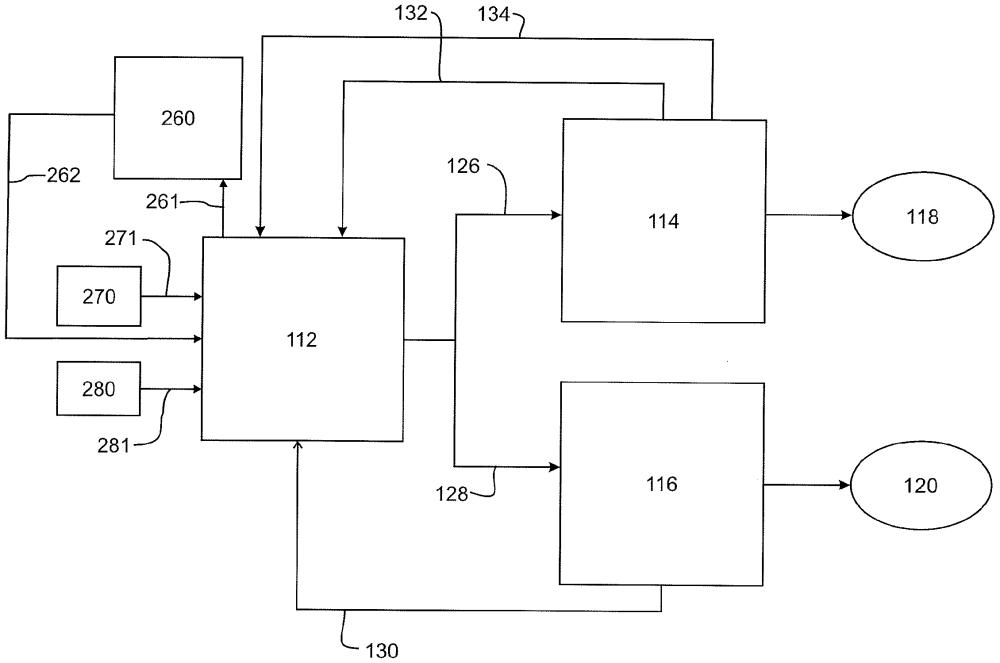
图1描绘了作为转向系统辅助故障应变(fallback)的制动-转向(brake-to-steer)功能的系统和方法的框图的说明性变型;
图2描绘了配备有足以执行本文描述的系统和方法中的至少一些的硬件的车辆的说明性变型;
图3描绘了系统或方法的说明性变型,包括在车辆的闪避操纵中应用差动制动;
图4是在车辆的闪避操纵中施加差动制动和推进力的应用的变型的图示;和
图5是在车辆的闪避操纵中使用差动制动的偏航率能力增加的曲线图形式的图示。
具体实施方式
以下对变型的描述本质上仅仅是说明性的,并且绝非旨在限制本发明的范围、其应用或用途。
在闪避操纵中,驾驶员通常以高的手轮速度转向,并且电动动力转向辅助马达提供辅助,以促进车辆对驾驶员的快速输入的迅速响应。然而,电动动力转向辅助系统组件,诸如但不限于动力组或电动马达,可能会出现故障。在这种情况下,驾驶员可以非常快速地达到非常高的扭矩,并且车辆将不会如此迅速地响应,从而增加了在避让操纵中碰撞的风险。差动制动的横向能力可以用于使用不同的致动器(制动器)来提供独特、多样的支持方法,所述致动器(制动器)可以通过增加来自制动力的偏航扭矩来帮助增加横向能力。同样的方法可以用于操作或半操作的电动动力转向系统(已经减少或降级),以辅助驾驶员和闪避操纵。当驾驶员快速操纵手轮以避开障碍物时,这可以增强车辆横向能力并补充电动动力系统。
当电子动力转向辅助系统包括诸如但不限于已经出现故障的电源组或电动马达的组件时,制动-转向算法可以由电子处理器执行,并且导致根据车辆状态信息产生对各个轮的制动压力请求。车辆状态信息可以包括例如横向加速度或偏航率中的至少一个,并且如果可用的话,转向传感器测量可以包括例如扭矩或角度中的至少一个。压力请求可以以这样的方式计算,即在至少一个道路轮上提供足够的制动力以生成偏航扭矩,该偏航扭矩进而生成对由驾驶员的手动转向引起的横向力进行补充的横向力。这可以最终允许车辆在闪避操纵期间实现与原本在丢失转向辅助的手动转向情况下实现的相比更高的偏航率。如果期望关于驾驶员意图的更多信息,如果转向柱上的原生转向角度传感器不可用,则可以使用外部转向柱角度传感器来指示或确定驾驶员意图。
多个变型可以包括一种系统和方法,该系统和方法包括经由至少一个电子处理器传送请求,该请求用于在电动动力转向辅助操作、失灵或部分操作、或者已经出现故障时向车辆的道路轮施加差动制动力以增加闪避操纵横向能力。在多个变型中,制动力可以通过向道路轮的制动盘或制动鼓施加制动衬块压力,或者在车辆行驶的相反方向上施加来自推进系统的力中的至少一个来实现。在多个变型中,制动力可以包括在车辆行驶的相反方向上运行道路轮的电动推进马达。
多个变型可以包括一种系统或方法,该系统或方法包括当电子动力转向辅助系统已经出现故障时,使用方向盘和车辆状态信息作为制动-转向系统的输入。制动-转向系统可以用于在闪避操纵的事件中向驾驶员引起的转向角度增加附加的偏航扭矩,从而在电子动力转向辅助系统不操作并且不能提供辅助时,帮助驾驶员在紧急避障操纵中实现更高的偏航率。可以利用指示车辆运动状态的车辆动态信号,并且还有转向传感器信号(当可用时)。或者,当电子动力辅助系统操作、部分操作或开始出现故障时,该功能可以被实现以增强闪避操纵期间的横向响应。
多个变型可以被构造和布置用于以下事件序列。驾驶员可以驾驶具有正常运作的电动动力转向系统的车辆,并且在某个时刻,电动动力系统控制器或电动动力系统马达失灵或停机,使得其不提供能够帮助驾驶员使车辆转向的马达输出。通过车灯和警报,驾驶员在视觉和听觉上被告知故障。驾驶员看到前方有障碍物,并且试图通过快速转向方向盘来执行闪避操纵,以避免碰撞。横向加速度、偏航率和车辆速度数据可以被发送到制动-转向辅助丢失支持控制器,并且如果可用,则关于转向角度、方向盘速率和转向扭矩的信号被发送到制动-转向辅助丢失支持控制器。同时,运行制动-转向辅助丢失支持算法的辅助丢失控制器或制动器电动控制单元根据上述信号立即向制动器电动控制单元发送压力请求,制动器电动控制单元将压力请求差动分配给所有四个轮。由于通过差动制动力生成的附加偏航扭矩,车辆能够实现的偏航率现在已经增加。在制动-转向事件期间,尽可能维持车辆速度。制动-转向功能保持激活,并可用于在任何附加的闪避操纵中支持驾驶员,以便驾驶员能够正确地将车辆带到安全状态。
在多个说明性的变型中,转向接口可以包括手轮、操纵杆、轨迹球、滑块、油门、按钮、拨动开关、杠杆、触摸屏、鼠标或任何其他已知的用户输入部件。
在多个说明性变型中,车辆可以包括转向系统,该转向系统包括转向接口和可转向推进系统,相应地,诸如但不限于方向盘和道路轮。
在多个说明性变型中,车辆可以包括电动制动系统,该电动制动系统被构造和布置为向任意数量的道路轮施加制动压力,以基于驾驶员转向接口输入来辅助车辆转向。电动制动系统可以经由至少一个控制器与转向系统和道路轮致动器组装件可操作地通信。控制器可以实现任意数量的系统(包括算法),以用于监控和控制推进、转向和制动。根据一些变型,电动制动系统可以用于向多个轮施加差动制动压力,以在电动动力转向系统辅助的一部分已经出现故障的情况下实现车辆的横向运动。
在多个说明性变型中,制动-转向系统可以利用由至少一个电子处理器可执行的制动-转向算法,所述至少一个电子处理器可以根据包括转向角度、转向角度速率和转向扭矩的驾驶员转向输入将制动压力请求传送到各个轮。当系统已经检测到闪避操纵时,无论电动动力辅助系统是在操作、部分操作或故障,或者已经出现故障,制动-转向算法都可以传送制动压力请求。
当检测到驾驶员的闪避操纵时,系统可以经由集成在车辆中的人机接口向驾驶员生成视觉或音频提示。作为非限制性示例,系统可以经由灯或警报指示正在实现制动-转向功能。以转向信号形式输入到手轮中的驾驶员输入可以包括方向盘角度、方向盘速率,并且转向扭矩可以被传送到制动-转向驾驶员方向控制器。制动-转向算法可以接收所述转向信号,并根据到电动制动系统电动控制单元的转向信号计算制动压力请求。电动制动系统可以提供对转向信号的驾驶员输入的响应,以减少或增加车辆的偏航率。在一些情况下,该系统可以提供对车辆推进系统的控制,并且可以根据需要调节油门、速度、加速度等,以在制动-转向系统操作时维持行驶速度和/或进一步提高车辆的偏航率。在一些情况下,该系统可以控制车辆推进系统,以在制动-转向系统操作时促进车辆逐渐减速。
根据一些变型,制动-转向系统可以由外部域控制器控制,该外部域控制器被构造和布置为当正在进行闪避操纵时采用制动-转向功能。
根据一些变型,制动-转向系统可以通过将转向请求转换成期望的偏航率来起作用,该偏航率然后可以转换成施加到车辆制动器的对应制动压力,以便在驾驶员控制方向盘的情况下产生期望的偏航率。制动压力可以经由电动制动系统施加到车辆制动器上。制动压力可以根据需要施加到各个制动卡钳上。
将转向请求转换为实际偏航率,以及将偏航率转换为制动压力可以经由计算或查找表来完成。类似地,将转向角度转换成合适的制动压力也可以经由计算或查找表来实现。
根据一些变型,制动-转向系统可以连续监控车辆速度、偏航率和横向加速度,并且可以向车辆内的各种其他系统广播制动-转向功能的可用性,使得如果需要,可以容易地实现制动-转向功能。根据一些变型,制动-转向系统的可用性可以包括考虑车辆速度数据以确定制动-转向系统的可用性。
图1描绘了作为转向辅助故障应变的制动-转向系统和方法的框图的说明性变型。车辆可以包括控制器112,控制器112被构造和布置为经由转向系统114接收驾驶员转向输入134。控制器112可以附加地被构造和布置为向转向系统114提供转向致动器命令126。转向系统114可以向控制器112输出轮胎角度变化118以影响转向系统健康状态132。控制器112还可以被构造和布置为向电动制动系统116提供制动命令128,电动制动系统116进而可以向各个制动卡钳施加制动压力120。在传感器和/或转向系统114已经向控制器112指示正在进行闪避操纵的情况下,控制器112可以发送制动移动请求,以在所有道路轮处提供差动制动,从而增加车辆的偏航率。如果转向系统114指示动力转向辅助已经出现故障,则控制器112可以经由方向盘接收驾驶员输入134,并将转向请求转换成制动压力请求或命令128,以传送到电动制动系统116。控制器112还可以接收来自各种设备270的输入271,所述设备270被设计成测量车辆状态信息,包括但不限于横向加速度、偏航率、轮速度。控制器可以从各种设备280接收输入281,所述设备280可以包括但不限于在算法中使用以估计各种车辆状态的gps、相机、激光雷达和雷达。估计的车辆状态可以是有帮助的,例如但不限于,当方向盘角度、扭矩、速度传感器不可用时。可以提供纵向动态控制器260来发送扭矩请求以使前道路轮车轮和/或后道路轮加速或减速。纵向动态控制器260可以从控制器112接收输入261,并且可以将输出262发送到控制器112。在多个变型中,推进系统可以包括单独控制的电动马达,以向每个道路轮提供差动驱动力。
图2描绘了配备有硬件的车辆部分的说明性变型,所述硬件足以执行本文描述的系统和方法中的至少一些。车辆250可以包括控制器212,控制器212被构造和布置为在车辆250中提供制动-转向功能。控制器212可以与转向系统214和电动制动系统216可操作地通信。转向系统214和电动制动系统216可以与至少一个道路轮242可操作地通信。驾驶员可以利用手轮244提供驾驶员输入134以用于横向移动,并且向转向系统214发送转向请求。在一些变型中,与转向接口244相关联的转向辅助246可以与控制器212、转向系统214或电动制动系统216可操作地通信。在一些变型中,转向辅助246可以与转向系统214断开连接或者处于故障状态248,或者不能与转向系统214通信。在这样的变型中,转向传感器247可以将转向请求传送给控制器212,控制器212可以接收转向系统214健康状态信息。在控制器212已经接收到指示组件(诸如转向辅助246)已经出现故障的转向系统214健康状态信息的情况下,控制器212可以将来自转向传感器247的转向请求转换成要传送到电动制动系统216的制动压力请求。电动制动系统216可以将制动压力218施加到确定的合适的道路轮242,以作为驾驶员经由手轮244的输入134实现车辆的横向移动。控制器212还可以被构造和布置为向车载推进系统发出速度和加速度请求240,使得车辆可以在使用制动-转向功能向驾驶员提供转向辅助期间维持或修改速度或加速度。如果转向传感器247不操作,则外部转向角度传感器257可以设置在车辆中的另一个位置,并且传送驾驶员的转向意图,该外部转向角度传感器257可以由控制器以与关于转向角度的转向传感器相同的方式使用。同样,控制器112还可以从各种设备270接收输入271,这些设备被设计成测量车辆状态信息,包括但不限于横向加速度、偏航率、轮速度。控制器可以从各种设备280接收输入281,所述设备280可以包括但不限于可以在算法中使用以估计各种车辆状态的gps、相机、激光雷达和雷达。估计的车辆状态可以是有帮助的,例如但不限于,当方向盘角度、扭矩、速度传感器不可用时。控制器112可以接收输入并将输出发送到推进系统。
图3描绘了用于在闪避操纵期间使用制动-转向功能来增加横向能力的系统的说明性变型的简化流程图。该系统可以例行地或近似连续地向控制器提供制动-转向能力302,这指示制动-转向功能准备就绪。在点304,包括转向辅助健康状态的转向系统状态,可以被传送到运动控制器。在一些情况下,健康状态可以指示转向辅助的部分有失效、故障、失灵或不可操作的风险。在点306,控制器可以接收转向系统健康状态并确定转向已经出现故障。在点307,控制器可以接收横向加速度、偏航率、车辆速度、转向角度、转向扭矩和/或方向盘角度,并确定驾驶员是否正在进行闪避操纵。在点308,然后控制器在驾驶员转向接口处接收驾驶员输入作为转向请求。在点310,控制器可以将转向请求转换成制动压力请求。该输入可以来自转向传感器(如果可用的话)或者测量或可以用于估计车辆状态的其他设备,所述车辆状态诸如但不限于横向加速度、偏航率或轮速度。可替代地,系统可以将转向请求转换成车辆偏航率请求,并且将偏航率请求转换成制动压力请求。在点312,电动制动系统可以接收制动压力请求,并将制动压力施加到车辆上的各个制动卡钳,以便增加车辆的偏航率。在点314,控制器向推进系统发送扭矩请求,以满足道路轮加速或减速请求,从而进一步增加车辆的偏航率。
图4A图示了当驾驶员开始手动闪避转向操纵时的车辆。由至少一个电子过程执行的制动-转向算法产生制动力,该制动力在车辆的重心上引起偏航扭矩。图示了来自驾驶员手动转向输入的横向轮胎力。
图4B是以增加的总横向轮胎力移动车辆的转向齿条的制动和横向力。
图4C图示了一种变型,其中提供由动力系扭矩生成的纵向力(也与跨车辆后轮轴的制动力相组合),以进一步增加车辆的偏航率。
图5是在两次闪避操纵期间收集的数据的曲线图。在曲线图的左侧,是没有在丧失动力转向辅助期间应用的制动-转向功能的闪避操纵的数据。曲线图的右侧是具有在丧失动力转向辅助期间应用的制动-转向功能的闪避操纵的数据。如曲线图的右侧所示,当在闪避操纵期间应用差动制动时,对于类似的闪避转向输入,实现了更大的偏航率能力。
以下对变型的描述仅是对被认为在本发明范围内的组件、元件、动作、产品和方法的说明,并且不以任何方式旨在通过具体公开或未明确阐述的内容来限制这样的范围。除了本文明确描述的之外,本文描述的组件、元件、动作、产品和方法可以被组合和重新排列,并且仍然被认为在本发明的范围内。
变型1可以包括一种方法,该方法包括:包括使用至少一个处理器来确定车辆中是否正在进行闪避转向操纵;并且如果正在进行闪避转向操纵,则包括使用至少一个电子处理器来在电动动力转向操作、失灵或部分操作、或者已经出现故障时,向车辆的道路轮施加差动制动力,以增加闪避操纵横向能力。
变型2可以包括如变型1所阐述的方法,其中电动动力转向是操作的。
变型3可以包括如变型1所阐述的方法,其中电动动力转向系统失灵或部分操作。
变型4可以包括如变型1所阐述的方法,其中电动动力转向已经出现故障。
变型5可以包括如变型1所阐述的方法,该方法进一步包括:包括使用至少一个电子处理器向车辆的推进系统发送加速或减速请求,以进一步增加车辆的偏航率。
变型6可以包括如变型1所阐述的方法,该方法基于横向加速度、偏航率、车辆速度、转向角度、转向扭矩或方向盘角度中的至少一个来确定是否正在进行闪避转向操纵。
变型7可以包括一种方法,该方法包括:包括使用至少一个处理器来确定车辆中是否正在进行闪避转向操纵;以及如果正在进行闪避转向操纵,则包括使用至少一个电子处理器,来在电动动力转向辅助操作、失灵或部分操作、或者已经出现故障时,传送向车辆的道路轮施加差动制动力以增加闪避操纵横向能力的请求;其中制动力是通过向道路轮的制动盘或制动鼓施加制动衬块压力或者在车辆行驶的相反方向上施加来自推进系统的力中的至少一个来实现的。
变型8可以包括如变型7中所阐述的方法,其中制动力通过在车辆的反向行驶方向上施加来自推进系统的力来实现,该推进系统包括在车辆的反向行驶方向上的道路轮的电动推进马达。
变型9可以包括控制器,该控制器被配置为当正在进行闪避转向操纵时对车辆的道路轮进行差动制动。
变型10可以包括如变型9中所阐述的控制器,其中差动制动包括向道路轮中的至少一个施加一定量的制动压力,以减小或增加车辆的偏航率。
变型11可以包括如变型10中所阐述的控制器,其中控制器包括算法,所述算法由至少一个电子处理器可执行,以基于横向加速度、偏航率、车辆速度、转向角度、转向扭矩或方向盘角度中的至少一个来确定是否正在进行闪避转向操纵。
变型12可以包括计算机可读介质,该计算机可读介质包括由电子处理器可执行以实行包括以下各项的动作的指令:确定车辆中是否正在进行闪避转向操纵;如果车辆中正在进行闪避转向操纵,则向制动系统输出制动压力请求,以向道路轮中的至少一个施加一定量的制动压力,从而增加车辆的偏航率。
变型13可以包括如变型12中所阐述的方法,其中确定是否正在进行闪避转向操纵是基于横向加速度、偏航率、车辆速度、转向角度、转向扭矩或方向盘角度中的至少一个的。
变型14可以包括一种方法,该方法包括:使用至少一个处理器来确定车辆中是否正在进行闪避转向操纵;并且如果正在进行闪避转向操纵,则包括使用至少一个电子处理器来向车辆的道路轮施加差动加速或减速力,以增加闪避操纵横向能力。
变型15可以包括如变型14中所阐述的方法,其中施加包括向车辆的道路轮施加加速力,以增加闪避操纵横向能力。
本发明范围内的所选变型的上述描述本质上仅仅是说明性的,并且因此,其变型或变化不应被视为脱离本发明的精神和范围。
- 具有可由行车制动操纵机构操纵的驻车制动器的电制动装置
- 具有可由行车制动操纵机构操纵的驻车制动器的电制动装置