一种用于消毒机器人操控的报警方法及系统
文献发布时间:2024-01-17 01:14:25
技术领域
本发明涉及报警控制的技术领域,尤其涉及一种用于消毒机器人操控的报警方法及系统。
背景技术
消毒防疫机器人简称消毒机器人,机器人为载体,在机器人内部装置消毒系统,有雾化消毒机器人、紫外线消毒机器人、等离子消毒机器人、强光脉冲消毒机器人等。其中雾化消毒机器人应用最为普遍,雾化消毒机器人将消毒剂雾化,产生消毒气体,再利用机器人的气动系统将消毒气体快速的在室内空间扩散,增加消毒的覆盖面和均匀性,能有效、无死角地杀灭空气中的致病微生物。
现有公开号为CN111562784A的中国专利公开了一种移动消毒机器人的消毒方法及设备,包含半自动化和全自动化两种操作模式:半自动模式下支持用户按区域编辑所需的消毒方式并由机器人按区域自动完成消毒操作;全自动模式下,用户只需人工配置必要的物理参数和成本权重,消毒规划和实施全部由运行在机器人端的策略主体自动完成。
针对上述相关技术,由于需要消毒的场所人流通常较为密集,因此当智能消毒机器人对场所内的环境病菌执行自动消杀操作时,智能消毒机器人周边可能会有生命体活动,此时智能消毒机器人正常执行消杀操作,容易将消毒气体喷洒到生命体周边,消毒气体中的某些成分可能会对生命体的安全健康造成危害,智能消毒机器人在消杀过程中存在有一定的安全隐患。
综上所述,就需要一种能够在智能消毒机器人执行消杀操作时,实时监测智能消毒机器人周边的消杀环境并生成报警信号以控制智能消毒机器人消杀进程的用于医疗器械操控的报警方法及系统。
发明内容
为了使智能消毒机器人不会将消毒气体喷洒到生命体周边,对生命体的安全健康造成危害,本发明提供一种能够在执行消杀操作时,实时监测智能消毒机器人周边的消杀环境并生成报警信号以控制智能消毒机器人消杀进程的用于医疗器械操控的报警方法及系统。
本发明提供的一种用于消毒机器人操控的报警方法及系统采用如下的技术方案:
第一方面,本发明提供一种用于消毒机器人操控的报警方法,包括以下步骤:
响应智能消毒机器人发送的消杀起始请求,所述消杀起始请求携带有用于进入消杀监测状态的消杀起始信息;
接收机器人移位图像数据;
从预设的数据库中查询安全消杀距离;
根据所述机器人移位图像数据以及所述安全消杀距离,生成安全消杀范围;
获取位于所述安全消杀范围内的生命体图像数据;
若获取到所述生命体图像数据,则生成报警控制指令并执行,所述报警控制指令用于控制智能消毒机器人中止消杀。
通过采用上述技术方案,当智能消毒机器人开始喷洒消毒气体时,报警系统响应智能消毒机器人发送的消杀起始请求,并以智能消毒机器人的所在位置为圆心,以安全消杀距离为半径,生成安全消杀范围;报警系统实时监测安全消杀范围内是否存在有生命体图像数据,若获取到生命体图像数据,则说明此时智能消毒机器人的消杀范围内存在有生命体,此时报警系统生成报警控制指令并执行,控制智能消毒机器人中止消杀,与此同时智能消毒机器人发出警报,提示处于消杀范围内的生命体及时离开。在智能消毒机器人执行消杀操作时,报警系统能够实时监测智能消毒机器人周边的消杀环境并生成报警控制指令,控制智能消毒机器人消杀进程,并警告处于消杀范围内的生命体,使智能消毒机器人不会将消毒气体喷洒到生命体周边。
进一步的,在所述生成报警控制指令并执行的步骤之后,还包括:
执行所述获取位于所述安全消杀范围内的生命体图像数据的步骤;
若未获取到所述生命体图像数据,则生成消杀启动指令并执行。
进一步的,在所述执行所述获取位于所述安全消杀范围内的生命体图像数据的步骤之前,还包括:
根据所述生命体图像数据,调取与所述生命体图像数据相对应的生命体数量数据;
根据所调取的生命体数量数据,确定与所述生命体数量数据相对应的预设检测周期;
根据所确定的预设检测周期,执行所述获取位于所述安全消杀范围内的生命体图像数据的步骤。
进一步的,在所述确定与所述生命体数量数据相对应的预设检测周期的步骤之中,具体包括:
从预设的数据库中查询与所述生命体数量数据相对应的预设生命体数量等级;
根据所述预设生命体数量等级,确定与所述预设生命体数量等级相对应的预设检测周期。
进一步的,在所述生成报警控制指令并执行的步骤之后,还包括:
根据所述生命体图像数据,调取与所述生命体图像数据相对应的预设生命体数据;
根据所调取的预设生命体数据,确定与所述预设生命体数据相对应的生命体类型信息,所述生命体类型信息包括动物和/或植物;
若所确定的生命体类型信息为植物,则生成主动躲避指令并执行。
第二方面,本发明提供一种用于消毒机器人操控的报警系统,包括:
消杀起始请求响应模块,用于响应智能消毒机器人发送的消杀起始请求,所述消杀起始请求携带有用于进入消杀监测状态的消杀起始信息;
移位图像数据接收模块,用于接收机器人移位图像数据;
安全消杀距离查询模块,用于从预设的数据库中查询安全消杀距离;
安全消杀范围生成模块,用于根据所述机器人移位图像数据以及所述安全消杀距离,生成安全消杀范围;
生命体图像数据获取模块,用于获取位于所述安全消杀范围内的生命体图像数据;
报警控制指令生成模块,用于若获取到所述生命体图像数据,则生成报警控制指令并执行,所述报警控制指令用于控制智能消毒机器人中止消杀。
综上所述,与现有技术相比,上述技术方案的有益效果是:
本发明所述的一种用于消毒机器人操控的报警方法及系统,能够
当智能消毒机器人开始喷洒消毒气体时,报警系统响应智能消毒机器人发送的消杀起始请求,并以智能消毒机器人的所在位置为圆心,以安全消杀距离为半径,生成安全消杀范围;报警系统实时监测安全消杀范围内是否存在有生命体图像数据,若获取到生命体图像数据,则说明此时智能消毒机器人的消杀范围内存在有生命体,此时报警系统生成报警控制指令并执行,控制智能消毒机器人中止消杀,与此同时智能消毒机器人发出警报,提示处于消杀范围内的生命体及时离开。在智能消毒机器人执行消杀操作时,报警系统能够实时监测智能消毒机器人周边的消杀环境并生成报警控制指令,控制智能消毒机器人消杀进程,并警告处于消杀范围内的生命体,使智能消毒机器人不会将消毒气体喷洒到生命体周边。
附图说明
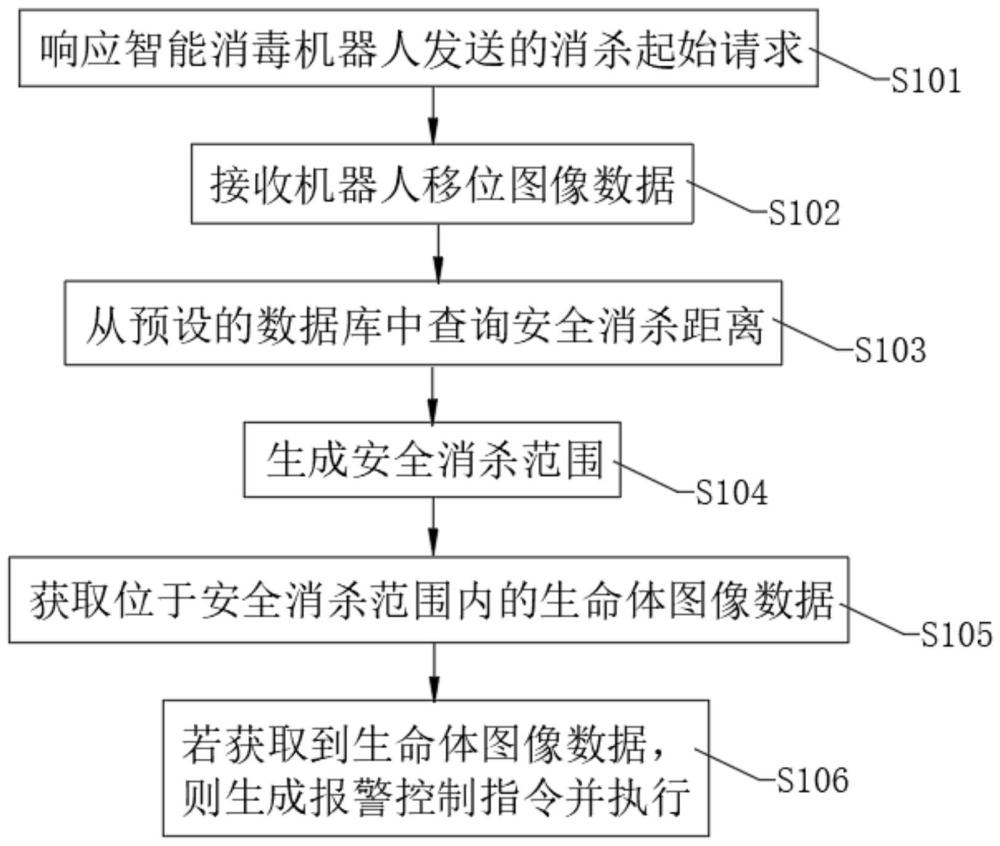
图1是本发明实施例一种用于消毒机器人操控的报警方法的流程示意图。
图2是本发明实施例中执行获取位于安全消杀范围内的生命体图像数据的步骤的流程示意图。
图3是本发明实施例中确定与预设生命体数量等级相对应的预设检测周期的流程示意图。
图4是本发明实施例中确定与预设生命体数据相对应的生命体类型信息的流程示意图。
图5是本发明实施例中各模块的模块框图。
附图标记说明:1、消杀起始请求响应模块;2、移位图像数据接收模块;3、安全消杀距离查询模块;4、安全消杀范围生成模块;5、生命体图像数据获取模块;6、报警控制指令生成模块。
具体实施方式
以下结合全部附图对本发明作进一步详细说明。
本发明实施例公开一种用于消毒机器人操控的报警方法及系统,参照图1,一种用于消毒机器人操控的报警方法,包括以下步骤:
S101、响应智能消毒机器人发送的消杀起始请求。
具体的,当智能消毒机器人即将开始喷洒消毒气体时,智能消毒机器人生成消杀起始请求并发送,此时报警系统响应智能消毒机器人发送的消杀起始请求,其中,消杀起始请求携带有用于进入消杀监测状态的消杀起始信息,用于使报警系统得知智能消毒机器人喷洒消毒气体具体起始时间。
S102、接收机器人移位图像数据。
具体的,公共场所内设置有多个监控摄像机,监控摄像机能够实时拍摄公共场所内的监控录像,监控摄像机根据智能消毒机器人的具体工作位置,生成机器人移位图像数据并发送,此时报警系统接收监控摄像机发送的机器人移位图像数据,进而能够在智能消毒机器人喷洒消毒气体时,实时获取智能消毒机器人的具体工作位置。
S103、从预设的数据库中查询安全消杀距离。
具体的,当智能消毒机器人即将开始喷洒消毒气体后,报警系统从预设的数据库中查询安全消杀距离,其中,安全消杀距离为用户预先设置生成,用于表示智能消毒机器人喷洒消毒气体时,消毒气体不会对生命体造成危害所需保证的最小喷洒距离。
S104、生成安全消杀范围。
具体的,报警系统从预设的数据库中查询安全消杀距离后,根据机器人移位图像数据以及安全消杀距离,生成安全消杀范围,其中,安全消杀范围为报警系统以智能消毒机器人的所在位置为圆心,以安全消杀距离为半径计算生成。进而使智能消毒机器人在移动过程中,报警系统能够实时根据智能消毒机器人的移动情况,计算得出不同时刻智能消毒机器人所需要的安全消杀范围。
S105、获取位于安全消杀范围内的生命体图像数据。
具体的,报警系统生成安全消杀范围后,监控摄像机对智能消毒机器人安全消杀范围内的生命体图像信息进行拍摄,生成生命体图像数据并发送,报警系统获取监控摄像机发送的位于安全消杀范围内的生命体图像数据,其中,生命体图像数据为监控摄像机拍摄生成,用于表示位于智能消毒机器人安全消杀范围内的生命体。由于监控摄像机仅能够拍摄到肉眼可见的生命体,因此昆虫和微生物并不会在监控摄像机的拍摄范围内。
S106、若获取到生命体图像数据,则生成报警控制指令并执行。
具体的,当智能消毒机器人开始喷洒消毒气体时,报警系统响应智能消毒机器人发送的消杀起始请求,报警系统实时监测安全消杀范围内是否存在有生命体图像数据,若获取到生命体图像数据,则说明此时智能消毒机器人的消杀范围内存在有生命体,此时报警系统生成报警控制指令并执行,控制智能消毒机器人中止消杀。
与此同时智能消毒机器人发出警报,提示处于消杀范围内的生命体及时离开。行人听到智能消毒机器人的语音警报,能够及时移动远离智能消毒机器人;小动物听到智能消毒机器人的语音警报,能够触发应激反应,及时从智能消毒机器人的周边逃开。
在智能消毒机器人执行消杀操作时,报警系统能够实时监测智能消毒机器人周边的消杀环境并生成报警控制指令,控制智能消毒机器人消杀进程,并警告处于消杀范围内的生命体,提醒处于消杀范围内的生命体及时离开,使智能消毒机器人不会将消毒气体喷洒到生命体周边。
参照图2,S106之后还根据生命体数量数据生成消杀启动指令,具体包括以下步骤:
S201、调取与生命体图像数据相对应的生命体数量数据。
具体的,报警系统生成报警控制指令并执行后,智能消毒机器人此时会停留在原地,暂停喷洒消毒气体,此时报警系统根据生命体图像数据,调取与生命体图像数据相对应的生命体数量数据,其中,生命体数量数据用于表示此时处于消杀范围内的生命体数量。
当报警系统对生命体图像数据进行分析时,报警系统从预设的数据库中查询用户预先设置生成的生命体图像信息,其中,生命体图像信息中包含可能出现在当前场所内的生命体形态图片,报警系统进而将生命体图像数据与生命体图像信息中的各个生命体形态图片进行比较,进而确定当前生命体图像数据内包含的生命体信息,并对所确定的生命体信息进行计数操作,得到与当前生命体图像数据相对应的生命体数量数据。
S202、确定与生命体数量数据相对应的预设检测周期。
具体的,报警系统调取到与生命体图像数据相对应的生命体数量数据后,根据所调取的生命体数量数据,确定与生命体数量数据相对应的预设检测周期,其中,预设检测周期为用户根据生命体数量数据以及实际使用过程中的历史经验预先设置生成。举例来说,当生命体数量数据为3时,相对应的预设检测周期为3秒;当生命体数量数据为5时,相对应的预设检测周期为5秒。
S203、执行获取位于安全消杀范围内的生命体图像数据的步骤。
具体的,报警系统确定与生命体数量数据相对应的预设检测周期后,根据所确定的预设检测周期,执行获取位于安全消杀范围内的生命体图像数据的步骤。按照所确定的预设检测周期,周期性地对位于安全消杀范围内的生命体进行检测,当消杀范围内的生命体数量较多时,生命体移动所需的时间相对较长,此时,报警系统间歇性的执行生命体检测操作,节约了检测资源。
S204、若未获取到生命体图像数据,则生成消杀启动指令并执行。
具体的,若报警系统未获取到生命体图像数据,则说明原本位于安全消杀范围内的生命体已经全部离开,此时报警系统生成消杀启动指令并执行,控制智能消毒机器人重新启动喷洒进程,继续执行消杀操作。
在另一实施例中,参照图3,S202具体包括以下子步骤:
S202.1、从预设的数据库中查询与生命体数量数据相对应的预设生命体数量等级。
具体的,报警系统调取到与生命体图像数据相对应的生命体数量数据后,从预设的数据库中查询与生命体数量数据相对应的预设生命体数量等级,其中,预设生命体数量等级为用户预先设置生成。举例来说,当生命体数量数据为3时,对应的预设生命体数量等级为1级;当生命体数量数据为5时,对应的预设生命体数量等级为2级。
S202.2、确定与预设生命体数量等级相对应的预设检测周期。
具体的,报警系统从预设的数据库中查询到与生命体数量数据相对应的预设生命体数量等级后,根据预设生命体数量等级,确定与预设生命体数量等级相对应的预设检测周期。举例来说,当预设生命体数量等级为1级时,相对应的预设检测周期为3秒;当预设生命体数量等级为2级时,相对应的预设检测周期为5秒。
参照图4,S106之后还根据生命体类型信息生成主动躲避指令,具体包括以下步骤:
S301、调取与生命体图像数据相对应的预设生命体数据。
具体的,报警系统生成报警控制指令并执行后,智能消毒机器人此时会停留在原地,此时,报警系统根据生命体图像数据,调取与生命体图像数据相对应的预设生命体数据,其中,预设生命体数据为用户预先设置生成。
S302、确定与预设生命体数据相对应的生命体类型信息。
具体的,报警系统调取到与生命体图像数据相对应的预设生命体数据后,根据所调取的预设生命体数据,确定与预设生命体数据相对应的生命体类型信息,其中,生命体类型信息包括动物和/或植物。
智能消毒机器人在执行消杀操作的过程中,消杀范围中可能会同时存在有多个生命体,当报警系统确定当前场所内所有的生命体形态图片后,将生命体图像数据与预设生命体数据相比较,并进一步确定各个生命体图像数据对应的生命体类型信息。
若是当前消杀范围内存在的生命体均为动物,那么生命体类型信息则为动物;若是当前消杀范围内存在的生命体均为植物,那么生命体类型信息则为植物;若是当前消杀范围内存在的生命体存在动物与植物,那么生命体类型信息则为动物与植物。
S303、若所确定的生命体类型信息为植物,则生成主动躲避指令并执行。具体的,若报警系统所确定的生命体类型信息为植物,则说明此时位于安全消杀范围内的生命体均为植物,由于植物不能主动离开智能消毒机器人的安全消杀范围,因此,报警系统生成主动躲避指令并执行,控制智能消毒机器人主动绕开当前植物,继续执行消杀操作。
本发明实施例一种用于消毒机器人操控的报警方法的实施原理为:当智能消毒机器人开始喷洒消毒气体时,报警系统响应智能消毒机器人发送的消杀起始请求,并以智能消毒机器人的所在位置为圆心,以安全消杀距离为半径,生成安全消杀范围;报警系统实时监测安全消杀范围内是否存在有生命体图像数据,若获取到生命体图像数据,则说明此时智能消毒机器人的消杀范围内存在有生命体,此时报警系统生成报警控制指令并执行,控制智能消毒机器人中止消杀,与此同时智能消毒机器人发出警报,提示处于消杀范围内的生命体及时离开。在智能消毒机器人执行消杀操作时,报警系统能够实时监测智能消毒机器人周边的消杀环境并生成报警控制指令,控制智能消毒机器人消杀进程,并警告处于消杀范围内的生命体,使智能消毒机器人不会将消毒气体喷洒到生命体周边。
基于上述方法,本发明实施例还公开一种用于消毒机器人操控的报警系统。参照图5,一种用于消毒机器人操控的报警系统,包括:
消杀起始请求响应模块1,消杀起始请求响应模块1用于响应智能消毒机器人发送的消杀起始请求,消杀起始请求携带有用于进入消杀监测状态的消杀起始信息。
移位图像数据接收模块2,移位图像数据接收模块2用于接收机器人移位图像数据。
安全消杀距离查询模块3,安全消杀距离查询模块3用于从预设的数据库中查询安全消杀距离。
安全消杀范围生成模块4,安全消杀范围生成模块4用于根据机器人移位图像数据以及安全消杀距离,生成安全消杀范围。
生命体图像数据获取模块5,生命体图像数据获取模块5用于获取位于安全消杀范围内的生命体图像数据。
报警控制指令生成模块6,报警控制指令生成模块6用于若获取到生命体图像数据,则生成报警控制指令并执行,报警控制指令用于控制智能消毒机器人中止消杀。
以上实施例仅用以说明本发明的技术方案,而非对发明的保护范围进行限制。显然,所描述的实施例仅仅是本发明部分实施例,而不是全部实施例。基于这些实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明所要保护的范围。尽管参照上述实施例对本发明进行了详细的说明,本领域普通技术人员依然可以在不冲突的情况下,不作出创造性劳动对本发明各实施例中的特征根据情况相互组合、增删或作其他调整,从而得到不同的、本质未脱离本发明的构思的其他技术方案,这些技术方案也同样属于本发明所要保护的范围。