一种空间智能安全管控机器人
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及电力施工技术领域,尤其涉及一种空间智能安全管控机器人。
背景技术
空间智能安全管控机器人是一种基于空间雷达定位和AI智能分析技术的升级版机器人,主要面向电力施工场景和智慧变电站。
随着我国智能电网建设的不断推进,改造和升级智慧变电站已成为重要任务。然而,在电力施工中,安全问题仍然是一个重要难题,许多安全隐患难以被提前捕捉和准确定位。
经检索,申请号CN106934728A的中国专利,公开了一种电网安全风险管控智能评估方法,通过获取配电网设备的当前运行数据以及健康运行过程中历史运行数据,确定配电网运行风险。
申请号CN115358619A的中国专利,公开了一种数字智能化的电网作业安全管控管理平台,其结合固定摄像头和移动布控球,对电网作业人员的作业位置和人员进行初步识别,并结合智能识别模型对电网作业人员的电网作业行为进行违规识别。
然而,尤其对于电力施工场景中,电力施工具有不同的场景,对不同场景的安全布控中,解决安全问题是尤为重要的,对电力施工场景中实现对带电设备高精度定位、智能化分析、事前预警、本地实时报警等以及严密监视预定区域的异物(吊车、高臂车、人员)进入并进行报警是能够提前把可能发生的事故遏制在萌芽阶段的重要手段,因此,亟需一种大大提高电力施工场景的安全性和可控性,降低意外事故的发生率,贡献于构建智慧电网并提升电力系统智能化水平的方案。
发明内容
本发明的目的是为了解决现有技术中存在的缺陷,而提出的空间智能安全管控机器人。
为了实现上述目的,本发明采用了如下技术方案:
一种空间智能安全管控机器人,包括若干机器人终端、用于所述机器人终端的空间监控模组和用于所述机器人终端和所述空间监控模组的管控系统,所述机器人终端的底端设有若干移动轮,所述空间监控模组包括空间雷达和全景摄像头,所述空间监控模组的底端设有与所述机器人终端相连接的升降杆。
进一步地,所述管控终端包括:
控制处理模块,用于为各个模块组件提供算了和数据指令传输;
雷达通信模块,用于连接相应组件获取机器人周围的三维空间布控信息,包括设备和人员的实时位置信息,将这些信息上传至相应模块组件中进行分析和处理;
无线通信模块:用于连接相应的无线通信模组进行高速数据传输,将机器人终端采集到的数据上传至云平台进行分析和管理;
通信交互模块,用于实现各个已连接通信的模块之间的数据指令交互和反馈;
终端分配管理模块,用于通过有线或者无线方式连接相应的终端设备,并对已连接的终端设备分配相应的权限、身份及相应的执行方式,实现不同身份终端的任务智能进行;
三维布控模块,用于根据指令进行和多个机器人终端的反馈数据进行管控空间的三维模拟,以及终端布置控制;
模板管理模块,用于预设相应的管控和各个模块的运行操作模板,并将相应的设定操作加入对应的场景预设中;
预测分析模块,用于根据各个模组反馈的管控数据,基于空间定位和布控数据进行场景隐患分析预测;
警报广播模块,用于根据分析预测的数据,当出现危险事件情况时,通过设定广播至各个相应终端,并同时反馈和定位安稳安全隐患位置;
数据分析存储模块,用于根据不同身份的终端,分配并进行相应的空间存储和分类,并根据终端的身份管理对存储及分类的数据进行相应的分析,获得符合当前执行动作数据的模板预设数据,其中:
所述雷达通信模块和所述无线通信模块均通过所述模板管理模块与所三维布控模块相连接,所述三维布控模块分别连接所述预测分析模块和所述警报广播模块,所述模板管理模块、所述预测分析模块和所述警报广播模块均通过通信交互模块与所述控制处理模块相连接,所述控制处理模块分别连接所述终端分配管理模块和所述数据分析存储模块。
进一步地,所述雷达通信模块和所述无线通信模块通过所述控制处理模块和所述三维布控模块相连接,用于通过三维空间布控的方式,实现对电力施工场景的安全布控,并监控和捕捉异常定位。
进一步地,所述终端分配管理模块连接所述模板管理模块、数据分析存储模块和所述通信交互模块,用于实将机器人终端及其它相连接终端的采集到的数据上传至云平台进行分析和管理实现远程实时地查看、接收报警信息,此外,还用于设定预设场景模板和将已设定的场景模板导出应用进行迅速布控。
进一步地,所述三维布控模块通过通信交互模块连接所述预测分析模块和所述警报广播模块,用于结合历史数据对场景进行精准分析和预测,并确定数据的警报范围及反馈数据至相应终端。
进一步地,所述数据分析存储模块、终端分配管理模块、模板管理模块、通信交互模块和三维布控模块相连接,用于对相连接的机器人终端和其它相适配终端划定预定区域及进行指令控制,同时,按照预设模板项目逐一分析当前布控数据,并生成新的布控预设模板。
相比于现有技术,本发明的有益效果在于:
通过设计空间智能安全管控机器人采用三维空间布控的方式,实现对电力施工场景的安全布控,有效地解决了安全隐患难以被提前捕捉和准确定位的问题;
通过平板、触控电脑等交互终端操作,同时利用升降模块组件,实现对带电设备近电距离划定预定区域,并严密监视预定区域的异物(吊车、高臂车、人员)进入并进行报警,从而实现高精度定位、智能化分析、事前预警、本地实时报警等特点。
此外,管控设置过程中,能够通过预设模板进行快速的布控设置,增减布控效率、分析精确度以及实现场景安全隐患的预测,并将数据通过4G、无线通信等方式上传至云平台,实现在远程实时地查看现场的情况,并准确获取到现场施工的风险情况,提前把可能发生的事故遏制在萌芽阶段,进而大大提高电力施工场景的安全性和可控性,降低意外事故的发生率。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
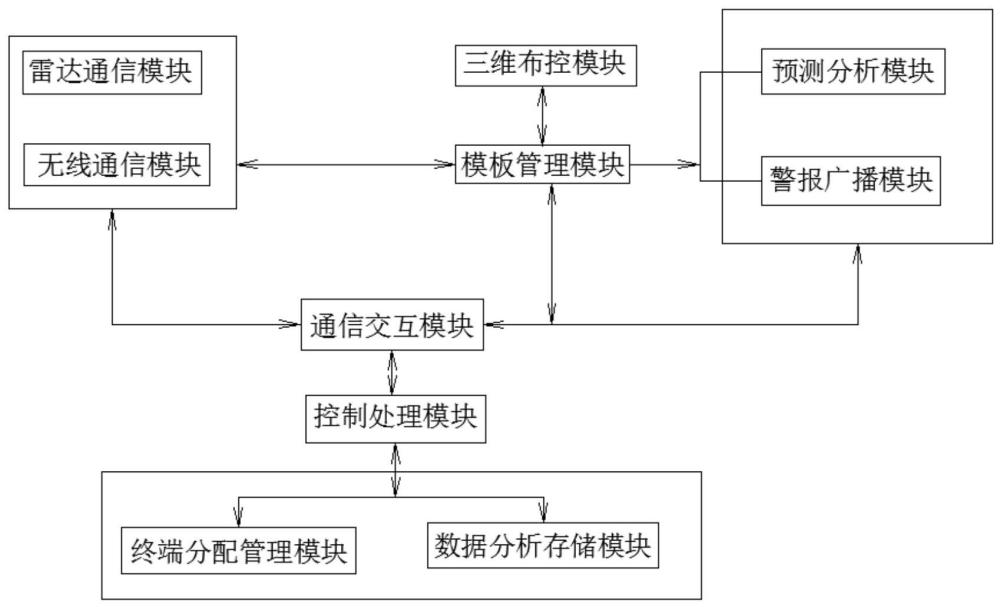
图1为本发明提出的空间智能安全管控机器人的管控系统的流程示意图;
图2为本发明的机器人终端的结构示意图;
图3为本发明实施例中的实施部署示意图。
图中:
1、机器人终端;2、空间雷达;3、全景摄像头;4、升降杆。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
实施例一
参照图2-3,空间智能安全管控机器人,包括若干机器人终端1、用于所述机器人终端1的空间监控模组和用于所述机器人终端和所述空间监控模组的管控系统,所述机器人终端1的底端设有若干移动轮,所述空间监控模组包括空间雷达2和全景摄像头3,所述空间监控模组的底端设有与所述机器人终端1相连接的升降杆4。
实施例二
如图1所示,在实施例一的基础上,所述管控终端包括:
控制处理模块,用于为各个模块组件提供算了和数据指令传输;
雷达通信模块,用于连接相应组件获取机器人周围的三维空间布控信息,包括设备和人员的实时位置信息,将这些信息上传至相应模块组件中进行分析和处理;
无线通信模块:用于连接相应的无线通信模组进行高速数据传输,将机器人终端采集到的数据上传至云平台进行分析和管理,其中:
基于4G通信,管理人员可以在远程实时地查看现场的情况,并通过手机APP、WEB等方式,接收机器人的报警信息。
基于wifi通信,机器人终端与其它终端之间的进行无线连接,通过平板或触控电脑操作,实现组件升降,并可实现对带电设备近电距离划定预定区域,并严密监视预定区域的异物(吊车、高臂车、人员)进入并进行报警。
通信交互模块,用于实现各个已连接通信的模块之间的数据指令交互和反馈;
终端分配管理模块,用于通过有线或者无线方式连接相应的终端设备,并对已连接的终端设备分配相应的权限、身份及相应的执行方式,实现不同身份终端的任务智能进行;
三维布控模块,用于根据指令进行和多个机器人终端的反馈数据进行管控空间的三维模拟,以及终端布置控制;
模板管理模块,用于预设相应的管控和各个模块的运行操作模板,并将相应的设定操作加入对应的场景预设中;
预测分析模块,用于根据各个模组反馈的管控数据,基于空间定位和布控数据进行场景隐患分析预测;
警报广播模块,用于根据分析预测的数据,当出现危险事件情况时,通过设定广播至各个相应终端,并同时反馈和定位安稳安全隐患位置;
数据分析存储模块,用于根据不同身份的终端,分配并进行相应的空间存储和分类,并根据终端的身份管理对存储及分类的数据进行相应的分析,获得符合当前执行动作数据的模板预设数据,其中:
所述雷达通信模块和所述无线通信模块均通过所述模板管理模块与所三维布控模块相连接,所述三维布控模块分别连接所述预测分析模块和所述警报广播模块,所述模板管理模块、所述预测分析模块和所述警报广播模块均通过通信交互模块与所述控制处理模块相连接,所述控制处理模块分别连接所述终端分配管理模块和所述数据分析存储模块。
在本实施例中,报警类型包括本地声光报警、WEB、手机APP远程报警。
连接的终端为机器人终端以及其它任一具有交互功能和无线通信功能的智能设备终端,具体包括平板、触控电脑、手机。
在本申请的具体实施例中:所述雷达通信模块和所述无线通信模块通过所述控制处理模块和所述三维布控模块相连接,用于通过三维空间布控的方式,实现对电力施工场景的安全布控,并监控和捕捉异常定位,具体流程为:
通过控制处理模块获取雷达通信模块和无线通信模块的反馈数据,分析得到当前的布控数据和场景数据;
控制处理模块依照场景的预设模板设定或者依照当前分析数据和用户需求进行电力施工场景的安全布控设置,并进行监控。
在本申请的具体实施例中:所述终端分配管理模块连接所述模板管理模块、数据分析存储模块和所述通信交互模块,用于实将机器人终端及其它相连接终端的采集到的数据上传至云平台进行分析和管理实现远程实时地查看、接收报警信息,此外,还用于设定预设场景模板和将已设定的场景模板导出应用进行迅速布控,具体流程为:
通过终端分配管理模块分配已连接的各个终端的身份及场景数据;
数据分析存储模块通过上一步骤数据匹配相应适配的预设模板,并根据预设进行布控;
通信交互模块根据预设模板,进行相应场景的分析,并反馈数据至相应的终端。
在本申请的具体实施例中:所述三维布控模块通过通信交互模块连接所述预测分析模块和所述警报广播模块,用于结合历史数据对场景进行精准分析和预测,并确定数据的警报范围及反馈数据至相应终端,具体流程为:
三维布控模块将布控数据通过通信交互模块经由控制处理模块处理后传输至预测分析模块中;
预测分析模块分析当前数据,并根据当前数据预测风险可能;
当前数据或预测数据出现异常时,将获取异常数据定位信息,并通过警报广播模块传输至相应的终端中进行警报。
在本申请的具体实施例中:所述数据分析存储模块、终端分配管理模块、模板管理模块、通信交互模块和三维布控模块相连接,用于对相连接的机器人终端和其它相适配终端划定预定区域及进行指令控制,同时,按照预设模板项目逐一分析当前布控数据,并生成新的布控预设模板,具体流程为:
通信交互模块获得终端数据及布控数据;
数据分析存储模块根据存储的预设模板数据对布控数据和终端身份定义进行设定;
根据模板预设设定进行相应的操作数据或者分析当前所有终端及布控执行数据,生成新的模板存储入。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。