高空碳纤维拉索检测系统及检测方法
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及一种碳纤维拉索检测技术,具体地说是一种高空碳纤维拉索检测系统及检测方法。
背景技术
拉索是超大型设备和长跨距桥梁的核心受力构件之一,其健康状况对整体结构的安全起到极其重要的作用。但随着服役年限的增加,其表面在紫外线照射和外部冲击的作用下不可避免的会产生硬化和损伤现象,而内部则由于风振、雨振等原因使丝束产生摩擦,引起磨损,进而发生断丝现象。这将严重影响拉索的安全使用状态,因此需要有效的检验检测技术定期对拉索内外进行检测,保障设备安全。
材料的选择对拉索的性能也有巨大的影响。近些年,逐渐兴起的碳纤维复合材料拉索在解决跨度、寿命、抗风雨振动方面,表现出了明显的优势。特别是在游乐设施、索道等对抗疲劳和抗腐蚀能力要求较高的超大型结构中拥有巨大的应用潜力。并且随着科技的不断进步,碳纤维复合材料性能的不断提高及成本的下降,其应用比例将不断提高。
目前还没有专门针对高空碳纤维拉索的无损检测技术。现有技术对拉索的检测主要通过人工手持检测仪本体攀爬拉索后由上而下依次进行检测,从而让操作人工的安全受到影响,且无法观测到拉索内部的具体情况。对于碳纤维复合材料无损检测技术,目前基于声发射、光导纤维、微波技术等,已经被广泛研究,但上述技术需要与被检结构直接接触,且受外界影响大,不适用于高空条件下的实时检测。
现在利用电磁学相关方法的检测技术在碳纤维复合材料缺陷检测中被证明颇有成效。中国专利CN 109444255 A提出了一种碳纤维增强复合材料缺陷的诊断方法,利用涡流检测装置获得其阻抗信息,以此进行缺陷诊断,但该方法需要扫描台上进行,无法满足大型结构以及使用中的高空构件的扫查需求。
发明内容
本发明的目的就是提供一种高空碳纤维拉索检测系统及检测方法,以解决现有拉索检测技术无法进行高空碳纤维拉索无损检测的问题。
本发明是这样实现的:一种高空碳纤维拉索检测系统,包括以下部分。
高空搭载单元,用于搭载检测单元进行高空飞行。
检测单元,设置于高空搭载单元上,包括可绕自身圆心旋转的C型架,在C型架上阵列设置有若干个线圈,用于产生激励磁场和检测碳纤维拉索产生的感应电势信号。
通道切换单元,用于将锁相放大器单元产生的激励信号传输至某一个线圈或将线圈检测到的感应电势信号传输至锁相放大器单元。
激励信号放大单元,用于将锁相放大器单元产生的激励信号放大后传输至通道切换单元。
锁相放大器单元,用于产生激励信号以及接收并处理感应电势信号。
主控单元,与通道切换单元、锁相放大器单元以及图像重建单元连接,用于控制通道切换单元、锁相放大器单元以及图像重建单元。
以及图像重建单元,用于使用检测得到的感应电势信号数据通过图像重建算法对被检碳纤维拉索径向截面上的电导率分布进行图像重建。
所述检测单元包括外壳和设置于所述外壳内的C型架和驱动元件,在所述C型架的内圈上绕圆心均匀设置有若干个线圈,所述C型架与所述外壳支架为可滑动连接,所述C型架由驱动元件驱动绕C型架的圆心旋转。
在所述C型架上设置有弧形的滑槽,所述滑槽的圆心与所述C型架的圆心重合,在所述壳体上设置有若干滑轮,所述滑轮安装在所述滑槽内。
在所述C型架的外圈设置有从动齿,所述驱动元件为步进电机,在步进电机的转轴上设置有主动轮,所述主动轮与所述从动齿相啮合。
所述高空搭载单元包括无人机,在所述无人机上设置有连接装置,所述检测单元设置于所述连接装置上。
本发明还公开了一种高空碳纤维拉索检测方法,基于前述的高空碳纤维拉索检测系统实现,其步骤如下。
a.使用高空搭载单元携带检测单元移动至待检测位置,并使检测单元的C型架套在碳纤维拉索上。
b.控制单元控制锁相放大器单元产生激励信号,并控制通道切换单元把激励信号通入检测单元中N个线圈中的任意一个线圈,令该线圈产生交变的激励磁场。
c.通过通道切换单元依次选通检测单元中N个线圈中的其它N-1个线圈检测其感应电势信号,并将感应电势信号通过通道切换单元送入锁相放大器单元。
d.通过锁相放大器单元从检测得到的感应电势信号中解调出其幅度及相对于激励信号的相移,并将处理后的结果送至主控单元。
e.重复步骤b~d,直至N个线圈都产生过激励磁场为止,得到一组N×(N-1)×2个检测数据。
f.使用得到的检测数据,通过图像重建算法对被检碳纤维拉索径向截面上的电导率分布进行图像重建,得到旋转前的被检碳纤维拉索径向截面上的损伤分布图像。
g.使检测单元的C型架旋转90°,重复步骤b~f,得到旋转后的被检碳纤维拉索径向截面上的损伤分布图像。
h.对旋转前和旋转后的被检碳纤维拉索径向截面上的损伤分布图像进行图像融合,对融合后的图像进行处理,得出物场特征参数,定量分析出所述被碳纤维拉索的径向截面损伤。
所述图像重建算法包括以下步骤。
S1、根据检测数据得到边界电压值U和灵敏度矩阵,通过线性方程U=SG推导出G,其中S是归一化的灵敏度矩阵,G是归一化的电导率分布向量,在图像重建中代表图像灰度值。
S2、建立Tikhonov正则化算法目标函数:
对上述公式求导,并令导数为0,求解目标函数极值点,得到
G=(S
其中,α为正则化参数,I为单位矩阵。
S3、对求解的灰度值电导率分布向量进行误差修正,Tikhonov正则化算法修正后的公式为
G
其中,G
S4、利用最小二乘法求解误差修正参数μ,构造关于μ的最小二乘函数F(μ):
F(μ)=||S(S
对上述公式求导,并令导数为0,求解μ得到
S5、对修正的灰度值进行相对容差判断,判断公式为
|G
其中,G
在步骤h中,令旋转前的被检碳纤维拉索径向截面上的损伤分布图像为源图像A,令旋转后的被检碳纤维拉索径向截面上的损伤分布图像为源图像B,对源图像A与源图像B进行多个角度的特征值提取后进行融合处理,得到具有完整损伤特征的融合分布图像R。
本发明采用高空搭载单元搭载检测单元能够对处于高空中的碳纤维拉索进行检测,检测单元的C型架能够套在高空中的碳纤维拉索上的任意位置,从而对需要检测的位置进行快速的检测,且通过高空搭载单元可以直接实现检测单元的就位和脱离,不需要人工进行拆卸和安装,提高了检测的安全性和便捷性。经过图像重建得到被检碳纤维拉索径向截面上的损伤分布图像,检测单元的C型架通过旋转可以对旋转前检测不到的缺口位置进行检测,经过图像融合后得到完整的被检碳纤维拉索径向截面上的损伤分布图像。
本发明满足碳纤维拉索快速、非接触的检测需求,实现可视化内部断丝等损伤缺陷,可利用计算机实现检测的远程控制,避免高空作业的风险,实现对大型高空结构的检验检测。
附图说明
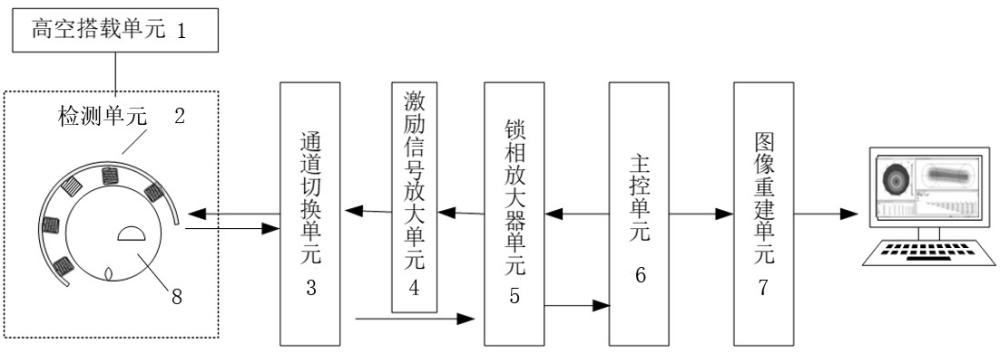
图1是本发明高空碳纤维拉索检测系统的构成图。
图2是本发明对碳纤维拉索进行检测时的示意图。
图3是本发明检测单元的结构图。
图4是本发明高空碳纤维拉索检测流程示意图。
图5是采用本发明图像重建算法与现有算法的对比图。
图中:1、高空搭载单元;2、检测单元;3、通道切换单元;4、激励信号放大单元;5、锁相放大器单元;6、主控单元;7、图像重建单元;8、碳纤维拉索;1-1、无人机;1-2、连接装置;2-1、壳体;2-2、C型架;2-3、线圈;2-4、滑槽;2-5、滑轮;2-6、从动齿;2-7、主动轮;2-8、磁屏蔽层。
具体实施方式
如图1、图2所示,本发明的高空碳纤维拉索8检测系统,包括高空搭载单元1、检测单元2、通道切换单元3、激励信号放大单元4、锁相放大器单元5、主控单元6以及图像重建单元7。
其中,高空搭载单元1用于搭载检测单元2进行高空飞行,高空搭载单元1一般为无人机1-1,也可以为其他飞行器。可以实现远程控制检测单元2的位置和移动轨迹,从而能够对高空碳纤维拉索8上的预定位置或区域进行检测。
如图3所示,检测单元2设置于高空搭载单元1上,检测单元2随高空搭载单元1一同移动。检测单元2包括外壳和设置于外壳内的C型架2-2和驱动元件,在C型架2-2的内圈上绕圆心均匀设置有若干个线圈2-3,C型架2-2与外壳支架为可滑动连接,C型架2-2由驱动元件驱动绕C型架2-2的圆心旋转。
外壳通过连接装置1-2固定在高空搭载单元1上,C型架2-2安装在外壳内,在C型架2-2上设置有弧形的滑槽2-4,滑槽2-4的圆心与C型架2-2的圆心重合,在壳体2-1上设置有若干滑轮2-5,若干个滑轮2-5在壳体2-1上呈弧形分布,且弧形的圆心与C型架2-2的圆心重合,滑轮2-5安装在滑槽2-4内,滑轮2-5能够沿着滑槽2-4移动。在驱动元件的驱动下,由于滑轮2-5和滑槽2-4的配合,使得C型架2-2能够绕其自身的圆心旋转。
在C型架2-2的外圈设置有从动齿2-6,驱动元件为步进电机,在步进电机的转轴上设置有主动轮2-7,主动轮2-7与从动齿2-6相啮合,步进电机通过主动轮2-7与从动轮的传动驱动C型架2-2的旋转。
在C型架2-2的外侧还设置有磁屏蔽层2-8,用于屏蔽线圈2-3产生的磁场,避免磁场对周围其他部件造成影响。
线圈2-3固定在C型架2-2的内圈上,且线圈2-3阵列等角度均匀布置在成像区域四周,其中每个线圈2-3为多匝铜线绕制而成,具体线圈2-3尺寸视成像区域的大小而定。
当接收到激励信号时,线圈2-3能够产生交变的激励磁场,同时,线圈2-3也可以用于碳纤维拉索8产生的感应电势信号的检测元件。检测单元2上共有若干个线圈2-3,当其中一个线圈2-3用于产生激励磁场时,其产生的激励磁场作用于被测的碳纤维拉索8上,由于碳纤维拉索8具有导电性/导磁性,从而会改变激励磁场的分布,剩下的线圈2-3作为检测元件能够检测到感应电势信号,以用于后期的处理。
通道切换单元3与检测单元2的线圈2-3阵列连接,同时与锁相放大器单元5以及信号放大单元连接。线圈2-3通过通道切换单元3切换为检测元件或激励元件,用于将锁相放大器单元5产生的激励信号传输至某一个线圈2-3或将线圈2-3检测到的感应电势信号传输至锁相放大器单元5。
激励信号放大单元4位于通道切换单元3和锁相放大器单元5之间,用于将锁相放大器单元5产生的激励信号放大后传输至通道切换单元3。
锁相放大器单元5能够产生激励信号,并且能够接收通过激励信号放大单元4传输至锁相放大器单元5的感应电势信号,并从感应电势信号中解调出其幅度及相对于激励信号的相移。
主控单元6与通道切换单元3、锁相放大器单元5以及图像重建单元7连接,通过主控单元6对通道切换单元3、锁相放大器单元5以及图像重建单元7进行控制。
图像重建单元7与主控单元6连接,主控单元6将经过锁相放大器单元5处理后的数据传输至图像重建单元7,图像重建单元7通过图像重建算法对被检碳纤维拉索8径向截面上的电导率分布进行图像重建。
除了检测单元2外,通道切换单元3、激励信号放大单元4、激励信号放大单元4、锁相放大器单元5也可以搭载在高空搭载单元1上,主控单元6与通道切换单元3、锁相放大器单元5通过以太网无线连接,可以实现远程控制以及信息传输。
本发明采用高空搭载单元1搭载检测单元2能够对处于高空中的碳纤维拉索8进行检测,检测单元2的C型架2-2能够套在高空中的碳纤维拉索8上的任意位置,从而对需要检测的位置进行快速的检测,且通过高空搭载单元1可以直接实现检测单元2的就位和脱离,不需要人工进行拆卸和安装,提高了检测的安全性和便捷性。经过图像重建得到被检碳纤维拉索8径向截面上的损伤分布图像,检测单元2的C型架2-2通过旋转可以对旋转前检测不到的缺口位置进行检测,经过后期的图像融合便可得到完整的被检碳纤维拉索8径向截面上的损伤分布图像。
本发明满足碳纤维拉索8快速、非接触的检测需求,实现可视化内部断丝等损伤缺陷,可利用计算机实现检测的远程控制,避免高空作业的风险,实现对超大型高空结构的检验检测。
如图4所示,本发明还公开了一种高空碳纤维拉索8检测方法,基于前述的高空碳纤维拉索8检测系统实现,其步骤如下。
a.使用高空搭载单元1携带检测单元2移动至待检测位置,并使检测单元2的C型架2-2套在碳纤维拉索8上。
b.控制单元控制锁相放大器单元5产生激励信号,并控制通道切换单元3把激励信号通入检测单元2中N个线圈2-3中的任意一个线圈2-3,令该线圈2-3产生交变的激励磁场。
c.通过通道切换单元3依次选通检测单元2中N个线圈2-3中的其它N-1个线圈2-3检测其感应电势信号,并将感应电势信号通过通道切换单元3送入锁相放大器单元5。
d.通过锁相放大器单元5从检测得到的感应电势信号中解调出其幅度及相对于激励信号的相移,并将处理后的结果送至主控单元6。
e.重复步骤b~d,直至N个线圈2-3都产生过激励磁场为止,得到一组N×(N-1)×2个检测数据。
f.使用得到的检测数据,通过图像重建算法对被检碳纤维拉索8径向截面上的电导率分布进行图像重建,得到旋转前的被检碳纤维拉索8径向截面上的损伤分布图像。
g.使检测单元2的C型架2-2旋转90°,重复步骤b~f,得到旋转后的被检碳纤维拉索8径向截面上的损伤分布图像。
h.对旋转前和旋转后的被检碳纤维拉索8径向截面上的损伤分布图像进行图像融合,对融合后的图像进行处理,得出物场特征参数,定量分析出被碳纤维拉索8的径向截面损伤。
其中,图像重建算法包括以下步骤。
S1、根据检测数据得到边界电压值U和灵敏度矩阵,通过线性方程U=SG推导出G,其中S是归一化的灵敏度矩阵,G是归一化的电导率分布向量,在图像重建中代表图像灰度值。
S2、建立Tikhonov正则化算法目标函数:
对上述公式求导,并令导数为0,求解目标函数极值点,得到
G=(S
其中,α为正则化参数,I为单位矩阵。
S3、为了提高图像重建的精度,对求解的灰度值电导率分布向量进行误差修正,建立修正公式:
G
而
ΔG=(S
则Tikhonov正则化算法修正后的公式为
G
其中,G
S4、利用最小二乘法求解误差修正参数μ。
首先确定检测的边界电压值与激励时设置的实际电压值之差ΔU为
ΔU=U
=S(G+ΔG)-U
=S(S
其中U
利用上式构造关于μ的最小二乘函数F(μ):
F(μ)=||S(S
对上述公式求导,并令导数为0,求解μ得到
S5、对修正的灰度值进行相对容差判断,判断公式为
|G
其中,G
本发明通过改进的Tikhonov正则化算法进行图像重建,从而得到准确度高的灰度值图像。
在步骤h中,令旋转前的被检碳纤维拉索8径向截面上的损伤分布图像为源图像A,令旋转后的被检碳纤维拉索8径向截面上的损伤分布图像为源图像B,对源图像A与源图像B进行多个角度特征值提取后进行融合处理,得到具有完整损伤特征的融合分布图像R。
具体步骤为:对重建得到的源图像A与源图像B先进行图像对准,即将两幅不同角度的源图像投影到同一平面并进行对准;对源图像进行平滑处理,即对源图像进行卷积操作,含有不同大小卷积核的卷积层从多个角度分别对源图像A、源图像B进行特征提取,得到提取的特征值LP_1,……,LP_N;将两幅图相对应的特征值通过加权平均融合规则进行融合处理,得到融合后的特征值LP_Fusion_1,……,LP_Fusion_N,对融合后的特征值进行图像重建得到融合后的拉索损伤图像R,实现损伤精准定位。
如图5所示,采用本发明的方法进行图像重建能够得到分辨率高且伪影小的图像,从而便于准确判断碳纤维拉索8径向截面上的损伤分布情况。
本发明利用电磁层析成像原理检测碳纤维拉索8径向截面上的损伤分布,其原理为:在激励线圈2-3中通入的交变激励电流,激励线圈2-3在被测空间产生交变的激励磁场,被测空间中具有导电性或导磁性物质的存在将会改变激励磁场的分布,从而形成被测物质空间电导率和磁导率分布信息的敏感场,分布在被测空间边界的检测线圈2-3以电磁感应的方式获得磁场的分布信息,即一个“投影”的数据。通过对激励单元的控制,改变激励磁场的激励扫描方向,得到多个投影方向的检测信息,通过数据处理电路获取这些信息后,由图像重建算法重构物质在被测空间中的分布状况,包括导电和导磁物质的分布图像;最后由图像特征参数提取单元获得物场的分布参数。
采用本发明的方法进行高空碳纤维拉索8检测的有益效果为:对碳纤维拉索8的径向截面进行成像,可直观分辨出损伤的大小,对损伤的定量检测提供直观、可靠的依据;创新性的“C”形结构可以通过无人机1-1实现检测位置控制,不需要人工拆卸,减小了实际应用中的风险;运用步进电机实现控制“C型探头旋转,系统采集数据全面、编写程序便捷,可实现自动控制;为非接触、非介入和无危害的检测仪器,避免了碳纤维拉索8与仪器之间的磨损,延长了仪器的使用寿命;可以实现对成像系统的远距离控制,不需要人工进行高空作业,提高了检测的安全性。