一种双机驱动空间运动振动破碎机及其参数确定方法
文献发布时间:2023-06-19 11:49:09
发明领域
本发明属于振动装置技术领域,涉及一种双机驱动空间运动振动破碎机及其参数确定方法。
背景技术
振动破碎机,是一种利用振动对物料进行破碎,从而实现物料的快速解离的工业设备。振动破碎机由于具有破碎力大,可靠性好等诸多优点,因此被广泛的使用到了建筑与矿山行业。本发明属于一种空间运动形式的颚式振动破碎机。普通的颚式振动破碎机会产生一些如下问题:
1.现有的颚式破碎机在工作时,只是由其动颚部与静颚部作相对运动,并以单向挤压的方式破碎物料,破碎效率低下,破碎效果不理想。
2.目前多数颚式破碎机破碎过程中产生的冲击作用直接传递到激振器上,易造成设备故障;另外,激振器由于受到冲击作用,转速波动大,激振系统的可靠性差,特别在振动自同步系统中,激振器受到冲击作用使得系统的同步性差,影响了设备的工艺效果。
3.为了提高工作效率,现在工程上普遍采用其他一些方式来改善颚式破碎机功能,但这些方法会导致设备结构复杂、体积大、加工成本高。
随着同步理论的不断完善,有必要应用先进的振动同步技术,设计一款既能提高设备功能,又能保证设备性能要求,且结构紧凑的颚式破碎机,使其既能提高效率又能长期稳定运行。
发明内容
本发明为了克服现有技术中存在的问题,通过以下技术方案实现:
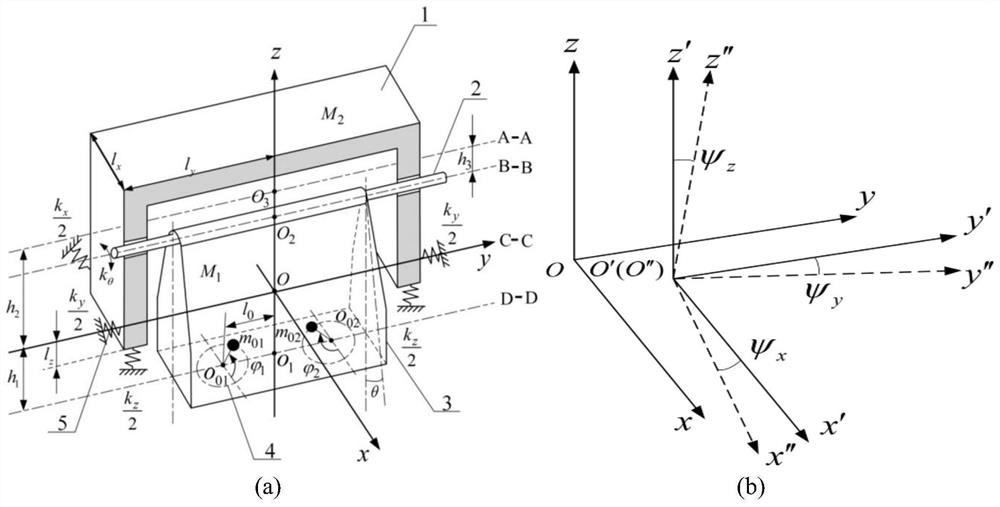
双机驱动空间运动振动破碎机的动力学模型包括:两个激振器、一个摆、一个基础质体、一根扭转轴以及x,y,z方向上的隔振弹簧;由偏心转子和感应电机组成的两个激振器对称安装在摆上;摆锤通过扭转轴安装在基础质体上,摆的回转平面与激振器的运动平面为空间交叉布置,即激振器的回转平面与水平面平行;基础质体通过隔振弹簧与固定机架相连。当两个偏心转子在感应电机的驱动下绕各自的旋转轴反向回转时,摆锤则绕扭转轴以一定的摆角转动,当物料从摆锤两侧落下时,通过摆锤与物料的挤压作用就可以实现物料的双向破碎。
所述空间运动振动破碎机机参数确定方法,包括如下步骤:
步骤1,建立动力学模型和系统运动微分方程
如图1(b)所示,建立如图所示的固定坐标系Oxyz,平移坐标系O′x′y′z′和旋转坐标系O′x″y″z″,O点为固定坐标系的原点,在系统未振动时,固定坐标系中O点与平移坐标系中O′点重合。同时设定系统主要参数如下:两个激振器分别绕着旋转中心轴O
根据Lagrange方程,得系统的运动微分方程如下:
Mz+f
J
式中,
M——振动系统的总质量,M=m
M
M
m
J
J
T
f
k
f
l
k
f
k
J
J
f
步骤2,推导求解系统响应
由于两感应电机相同且同时供电,则稳态时两激振器的角加速度
Ms
令
其中,
对Y(s),Z(s),ψ
z=0
其中,γ
r
结合式(3)和(4),得系统的振动响应如下:
z=0
根据式(5)可求出x,y,z,ψ
λ
步骤3,推导系统同步性判据
对式(6)进行微分,将x,y,z,ψ
其中,
2α的变化与
根据式(9)可得无量纲方程式(11),等号左边称为电机的无量纲残余力矩之差,等号右边称为无量纲耦合力矩。此外,在小阻尼超远共振条件下,γ
将式(8)两个方程相加并除以2T
同样地,平均无量纲负载力矩也是关于
激振器之间的耦合力矩越大,系统越容易实现同步。为了更直观的表达系统的同步能力,引入同步性能力系数,如式(15)。同步性能力系数为无量纲耦合力矩最大值与平均无量纲负载力矩最大值之比。
同步性能力系数越大,则系统的同步性能力越大。
步骤4,推导求解系统稳定性判据
将式(1)最后一个方程与其倒数第二个方程相减可得
J
式中,b为当量“阻尼系数”,ε为小参数项,
为了判别平衡的运动状态是否平衡,只需要研究平衡运动状态邻近区域的稳定性即可。因此有:
ΔT
Δα包括不变部分
所以,
因此扰动方程式为:
讨论系统的稳定性,只要研究可变部分Δα
上式为平衡状态的稳定性条件(或称同步状态稳定性条件),W
本发明的有益效果:
1)本专利采用双机同步驱动,破碎机采用激振器旋转平面与摆锤摆动平面空间交叉的布置方式可以减少破碎物料时对激振器的冲击,因此可有效提高破碎机零件的使用寿命。另外,激振器对称布置在摆锤上,不但可以提高激振器运转时的同步稳定性,而且大大提高了整个破碎机体运转时的稳定性。
2)本破碎机采用摆锤摆动破碎物料的形式,当摆锤摆动时,可以实现对于物料的双向破碎,从而提高破碎和生产效率。另外,本破碎机将激振器安装在摆上组成摆锤并作为动力源,结构紧凑,占地面积小,同时利用周期性往复高频振荡产生破碎力实现破碎过程,破碎力大,破碎比高,适用于高硬度脆性物料的破碎。
附图说明
图1(a)为双机驱动空间运动振动破碎机动力学模型图。
图中:1主工作机体;2扭转轴;3摆;4激振器;5隔振弹簧;
图中各参数含义:
Oxyz--绝对坐标系;
O--整个系统的中心;
O
O
O
O
O
φ
φ
M
M
m
m
l
k
k
l
h
h
h
θ--摆锤的摆角。
图1(b)固定坐标系Oxyz,平移坐标系O′x′y′z′,旋转坐标系O′x″y″z″。
图2为稳定相位差曲线。
图3为摆角幅值曲线。
图4为机体振幅曲线:
(a)机体平动的振幅;
(b)机体在ψ
(c)机体在ψ
图5为同步性能力系数曲线。
图6为稳定性能力系数曲线。
图7为h
(a)两个电机的转速;
(b)两个激振器之间的相位差;
(c)摆锤的摆角;
(d)机体平动位移;
(e)机体转动角位移。
图8为h
(a)两个电机的转速;
(b)两个激振器之间的相位差;
(c)摆锤的摆角;
(d)机体平动位移;
(e)机体转动角位移。
图9为h
(a)两个电机的转速;
(b)两个激振器之间的相位差;
(c)摆锤的摆角;
(d)机体平动位移;
(e)机体转动角位移。
图10为h
(a)两个电机的转速;
(b)两个激振器之间的相位差;
(c)摆锤的摆角;
(d)机体平动位移;
(e)机体转动角位移。
具体实施方案
实施例1:
本例为研究h
(a)h
图2表示系统的稳定相位差曲线。由图可知,在h
(b)h
图3表示摆角幅值曲线。从中可以看出,在h
(c)h
机体振动幅值曲线如图4所示。机体振动幅值包括机体平动的振幅与机体转动的振幅。从如图4(a)中可知,h
在h
从图4(c)中可知,η和h
(d)h
图5表示系统的同步性能力系数曲线。同步性能力系数越大,表明两个或激振器越容易实现同步运转。由图可知,η和h
(e)h
图6表示系统的稳定性能力系数曲线。稳定性能力系数越大,表明系统实现同步状态的稳定性越强。由图可知,η和h
实施例2
为了判断上节所推导微分方程的正确性,并初步研究空间运动双机驱动单摆系统可能出现的运动学和动力学现象,本例应用四阶龙格库塔程序对振动系统进行仿真。仿真程序中的参数与上例数值分析中的参数一致。本例将给出4组仿真。
(a)h
图7表示A组的仿真结果。从图7(a)中可知,当系统开始工作时,由于两个激振器完全相同,因此两个电机加速度一样。当系统达到同步运转后,两个电机转速稳定在。在时间40s时,电机2受到大小为π/6的干扰,两个电机的转速出现波动,但最终又恢复稳定。从图7(b)中可知,系统的稳定相位差近似为0°,当电机2施加干扰后,相位差出现短暂波动后恢复稳定,表明系统的稳定性良好。以上结果表明两个激振器反相位运动,并且该结果与4.5.1节中稳定相位差的结果一致。
由图7(c)可知,摆锤的摆角约为2.96°。由图7(d)可知,机体在x,y,z方向上的位移分别为-14.09mm~14.09mm,-4.05mm~4.05mm,0mm。由图7(e)可知,机体在ψ
(b)h
B组的仿真结果如图8所示,即h
由图8(c)可知,摆锤的摆角约为0.59°。由图8(d)可知,机体在x,y,z方向上的位移分别为-6.38mm~6.38mm,-4.05mm~4.05mm,0mm。由图8(e)可知,机体在ψ
(c)h
C组的仿真结果如图(9)所示。从图9(a)中可知,当系统开始工作时,由于两个激振器完全相同,因此两个电机加速度一样。当系统达到同步运转后,两个电机转速稳定在996rpm~1000rpm。在时间40s时,电机2受到大小为π/6的干扰,两个电机的转速出现波动,但最终又恢复稳定。
从图9(b)中可知,系统的稳定相位差近似为0°,当电机2施加干扰后,相位差出现短暂波动后恢复稳定,表明系统的稳定性良好。以上结果表明两个激振器反相位运动,并且该结果与前述稳定相位差的结果一致。
由图9(c)可知,干扰前后摆锤的摆角约为0.43°。由图9(d)可知,机体在x,y,z方向上的位移分别为-5.80mm~5.80mm,-4.04mm~4.04mm,0mm。由图9(e)可知,机体在ψ
(d)h
图10表示D组的仿真结果。从图10(a)中可知,当系统达到同步运转后,两个电机转速稳定在1000rpm~1010rpm。在时间40s时,电机2受到大小为π/6的干扰,两个电机的转速出现波动,但最终又恢复稳定。从图10(b)中可知,系统的稳定相位差近似为0°,当电机2施加干扰后,相位差出现短暂波动后恢复稳定,表明系统的稳定性良好。以上结果表明两个激振器反相位运动,并且该结果与前述稳定相位差的结果一致。由图10(c)可知,干扰前后摆锤的摆角约为0.44°。
由图10(d)可知,干扰前后机体在x,y,z方向上的位移分别为-5.79mm~5.79mm,-4.11mm~4.11mm,0mm,该结果与前述结果相近。由图10(e)可知,干扰前后机体在ψ
通过这几个实施例我们可知,η和h
- 一种双机驱动空间运动振动破碎机及其参数确定方法
- 一种立式双通道双机自同步振动惯性破碎机及参数确定方法