基于机器学习的高压发生器控制方法、系统、电子装置及计算机存储介质
文献发布时间:2023-06-19 18:32:25
技术领域
本申请涉及高压发生器管理技术领域,尤其是涉及一种基于机器学习的高压发生器控制方法、系统、电子装置及计算机存储介质。
背景技术
目前X光机和CT机用高压发生器,大多采用传统的数字控制方式及保护方式,其使用的控制参数和保护参数无法自动更新。此外随着X光机和CT机设备的使用,特别是X光和CT球管的老化,X光和CT球管的特性参数将发生变化,其控制参数和保护参数均会发生变化,此时,原有的控制参数无法匹配的X光和CT球管的老化特性,需要人工现场调试,校正,以保证性能和控制精度。并且,一些设备故障也无法提早发现。
发明内容
为了实现实时动态的调整高压发生器控制参数、保护参数,以及故障的早期识别,本申请提供了一种基于机器学习的高压发生器控制方法、系统、电子装置及计算机存储介质。
一方面,本申请提供了基于机器学习的高压发生器控制方法。
本申请提供的基于机器学习的高压发生器控制方法通过以下方案实现:
基于机器学习的高压发生器控制方法,包括:
建立高压发生器与标的设备的设备数字孪生模型;
持续采集高压发生器的实时数据,基于设备数字孪生模型及实时数据生成高压发生器及标的设备的运行状态信息;
从设备数字孪生模型中获取高压发生器运行的历史数据和高压发生器及标的设备的当前状态数据;
从历史数据和当前状态数据中获取高压发生器的特征数据;
根据特征数据得到高压发生器及标的设备性能的基本规律;
基于高压发生器及标的设备性能的基本规律,为高压发生器的特征数据赋予标签阈值;
基于高压发生器及标的设备性能的基本规律,并根据采集高压发生器的实时数据动态调整高压发生器的控制参数及保护参数;
基于高压发生器的特征数据的标签阈值及高压发生器及标的设备性能的基本规律,根据采集高压发生器的实时数据,判断高压发生器及标的设备是否处于故障状态。
在一些实施方式中,所述建立高压发生器与标的设备的设备数字孪生模型包括:
建立通用数字孪生模型;
持续采集高压发生器的实时数据及高压发生器的实时数据所对应的标的设备的特性参数,并将实时数据及实时数据所对应的标的设备的特性参数传输至通用数字孪生模型中,作为训练样本;
基于训练样本对通用数字孪生模型进行训练,并利用训练后的通用数字孪生模型构建设备数字孪生模型。
在一些实施方式中,采用元学习Meta-Learning算法对通用数字孪生模型进行训练。
在一些实施方式中,所述实时数据包括高压发生器作用于标的设备的实时电压数据、电流数据,以及温度数据及工作频率数据。
在一些实施方式中,持续采集高压发生器的实时数据,基于设备数字孪生模型及实时数据生成高压发生器及标的设备的运行状态信息为:使用设备数字孪生模型并根据实时数据对高压发生器及标的设备的运行状态进行仿真,获得与高压发生器及标的设备相对应的运行状态信息。
在一些实施方式中,所述从历史数据和当前状态数据中获取高压发生器的特征数据为去除所采集的历史数据和当前状态数据中的无效数据后剩余的有效数据,所述无效数据包括错误的异常数据和具有缺失项的不完整的数据。
在一些实施方式中,所述根据特征数据得到高压发生器及标的设备性能的基本规律包括:
在剩余的所述有效数据中确定特征数据的统计值,所述统计量包括:平均值、方差和极值;
绘制所述统计量的特性曲线,从所述特性曲线中得到故障状态、稳态运行状态及暂态运行状态的基本规律。
第二方面,本申请提供了基于机器学习的高压发生器控制系统。
本申请提供的基于机器学习的高压发生器控制系统通过以下方案实现:
基于机器学习的高压发生器控制系统,包括:
数字控制器,与高压发生器电连,用于数据的采集、高压发生器的驱动控制和故障保护;
数字孪生系统,与所述数字控制器通信连接,用于建模、参数计算机故障预测;
所述数字控制器包括:
数据采集单元,用于持续采集高压发生器的实时数据及高压发生器的实时数据所对应的标的设备的特性参数,并将实时数据及实时数据所对应的标的设备的特性参数传输至数字孪生系统中;
驱动控制单元,用于基于高压发生器及标的设备性能的基本规律,并根据采集高压发生器的实时数据动态调整高压发生器的控制参数及保护参数;
故障保护单元,用于基于数字孪生系统的故障预警指令执行故障保护;
数字孪生系统包括:
建模单元,用于建立高压发生器与标的设备数字孪生模型;
训练单元,用于将实时数据及实时数据所对应的标的设备的特性参数传输至设备数字孪生模型中进行训练;
处理单元,用于从设备数字孪生模型中获取历史数据和当前状态数据,并从历史数据和当前状态数据中获取高压发生器的特征数据,并根据特征数据得到高压发生器及标的设备性能的基本规律 ;
标签单元:用于根据高压发生器及标的设备性能的基本规律,为高压发生器的特征数据赋予标签阈值,赋予高压发生器及标的设备故障状态所对应的高压发生器的特征数据阈值。
第三方面,本申请提供了一种电子装置。
本申请提供的一种电子装置通过以下方案实现:
一种电子装置,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时,实现上述基于机器学习的高压发生器控制方法。
第四方面,本申请提供了一种计算机可读存储介质。
本申请提供的一种计算机可读存储介质通过以下方案实现:
一种计算机可读存储介质,存储有能够被处理器加载并执行如上述基于机器学习的高压发生器控制方法的计算机程序。
本申请提供的基于机器学习的高压发生器控制方法、系统、电子装置及计算机存储介质与现有技术相比具有以下优点:
本申请通过实时收集设备的关键信息,如工作频率,电压输出,电流输出,温度等,自动进行特征提取,建立设备和标的设备,如X光和CT球管的数字行为模型,从而实现实时动态的调整高压发生器控制参数、保护参数,以及实现高压发生器及标的设备的故障早期识别。
附图说明
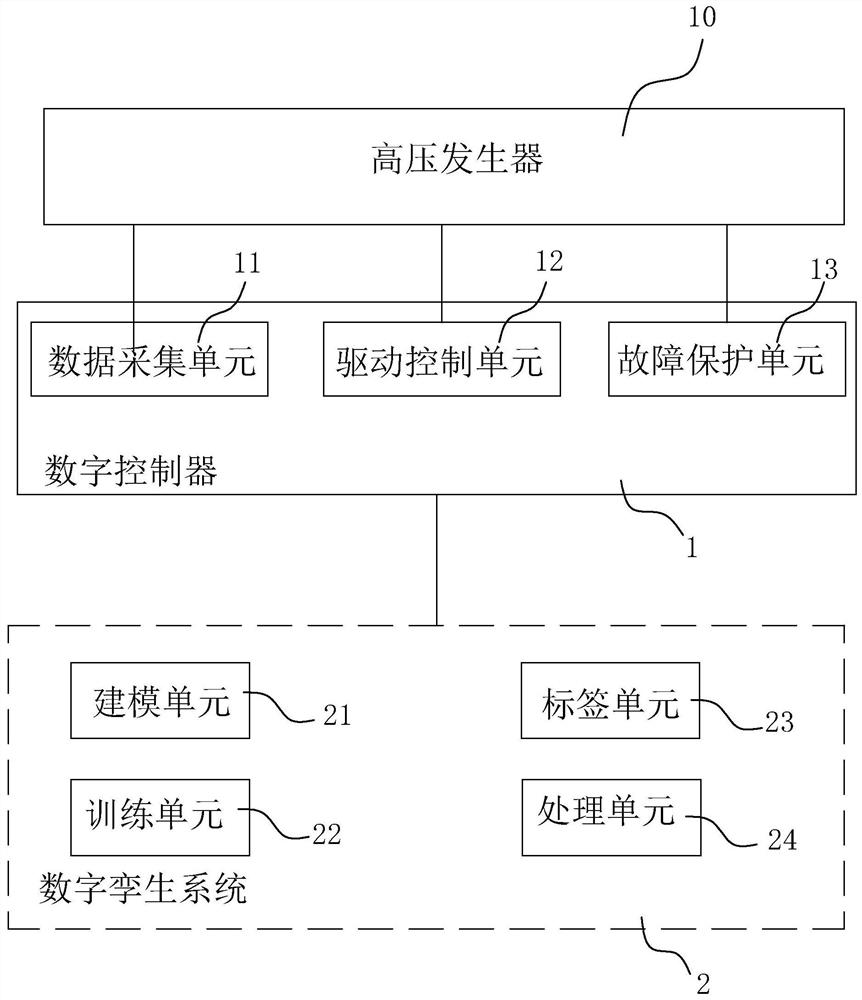
图1为本申请实施例公开的基于机器学习的高压发生器控制的结构示意图;
图2为本申请实施例公开的电子装置的结构示意图。
图中,1、数字控制器;10、高压发生器;11、数据采集单元;12、驱动控制单元;13、故障保护单元;2、数字孪生系统;21、建模单元;22、训练单元;23、处理单元;24、标签单元;3、存储器;4、处理器。
具体实施方式
以下结合附图对本申请作进一步详细说明。
本申请首先公开了基于机器学习的高压发生器控制方法,本申请此实施方式中,该高压发生器应用于X光机和/或CT机。
本申请公开的基于机器学习的高压发生器控制方法包括以下步骤:
S1:建立高压发生器与X光机,或高压发生器与CT机,或发生器与X光机和CT机的设备数字孪生模型;
设备数字孪生模型是所使用的高压发生器和X光机,或所使用的高压发生器和CT机,或所使用的高压发生器和X光机及CT机所对应的数字模型,具有与所使用的高压发生器、X光机CT机完全相同的大小、形状以及结构,并且能够完成与实体设备相同的动作、任务。
其中,高压发生器控制参数和保护参数根据X光和/或CT机的CT球管的特性参数变化而变化。
建立高压发生器与X光机,或高压发生器与CT机,或发生器与X光机和CT机的设备数字孪生模型包括:
S101:建立通用数字孪生模型,通用数字孪生模型为现有的深度学习模型。
S102:持续采集高压发生器的实时数据及高压发生器的实时数据所对应的X光和/或CT机的CT球管的特性参数,并将实时数据及实时数据所对应的X光和/或CT机的CT球管的特性参数传输至通用数字孪生模型中,作为训练样本,这里,初始的训练样本可预选获取并存储。
S103:基于训练样本对通用数字孪生模型进行训练,并利用训练后的通用数字孪生模型构建设备数字孪生模型。
其中,基于训练样本对通用数字孪生模型进行训练可以使用多种方 法。例如元学习Meta-Learning算法等。
S2:持续采集高压发生器的实时数据,基于设备数字孪生模型及实时数据生成与高压发生器、X光和/或CT机相对应的运行状态信息,与此同时,将实时数据传输至设备数字孪生模型中,实现数据的同步。
实时数据包括高压发生器作用于X光和/或CT机的实时电压数据、电流数据,以及温度数据及工作频率数据,通过高压发生器的数字控制硬件实时采集高压发生器的上述关键信息。
使用设备数字孪生模型并根据实时数据可以对高压发生器、X光和/或CT机的运行状态进行仿真,获得与高压发生器、X光和/或CT机相对应的运行状态信息。运行状态信息包括历史、当前和预测运行状态信息中的至少一个信息,运行状态信息具体包含设备的故障、稳态运行、暂态运行等信息。
S3:从设备数字孪生模型中获取高压发生器运行的历史数据和高压发生器、X光和/或CT机当前状态数据,并从历史数据和当前状态数据中获取高压发生器的特征数据,并根据特征数据得到高压发生器、X光和/或CT机性能的基本规律。
其中,特征数据的获取为:获取该历史数据和当前状态数据,具体包括采集的电流、电压、温度、工作频率等,去除所采集的历史数据和当前状态数据中的无效数据,该无效数据包括错误的异常数据和具有缺失项的不完整的数据。
高压发生器、X光和/或CT机性能的基本规律是指高压发生器、X光和/或CT机不同工作状态所具有的基本属性的特点和规律,包括故障状态所具有的基本属性的特点和规律、稳态运行状态所具有的基本属性的特点和规律、暂态运行状态所具有的基本属性的特点和规律。根据特征数据得到高压发生器、X光和/或CT机性能的基本规律为:在剩余的有效数据中确定电流、电压、温度和工作频率的统计值,该统计量包括:平均值、方差和极值等,绘制该统计量的特性曲线,从该特性曲线中得到故障状态、稳态运行状态及暂态运行状态的基本规律,即,故障状态的统计量的基本规律、稳态运行状态的统计量的基本规律及暂态运行状态的统计量的基本规律。
S4:基于高压发生器、X光和/或CT机性能的基本规律,为高压发生器的特征数据赋予标签阈值。即赋予高压发生器、X光和/或CT机故障状态所对应的高压发生器的特征数据阈值。
S5:基于高压发生器、X光和/或CT机性能的基本规律,并根据采集高压发生器的实时数据动态调整高压发生器的控制参数及保护参数,同时,于高压发生器的特征数据的标签阈值判断基于高压发生器、X光和/或CT机是否处于故障状态,在故障状态时发出预警。
S6:基于高压发生器的特征数据的标签阈值及高压发生器、X光和/或CT机性能的基本规律,根据采集高压发生器的实时数据,判断高压发生器、X光和/或CT机是否处于故障状态,通过故障预警以判断调整高压发生器的控制参数及保护参数的行为是否存在偏差。
本申请还公开了基于机器学习的高压发生器控制系统,如图1所示,包括:
数字控制器1,与高压发生器10电连,用于数据的采集、高压发生器10的驱动控制和故障保护;
数字孪生系统2,部署于本地服务器或微信PC,用于建模、参数计算机故障预测。
数字孪生系统2与数字控制器1通信连接。
其中,数字控制器1包括:
数据采集单元11,用于持续采集高压发生器10的实时数据及高压发生器10的实时数据所对应的X光和/或CT机的CT球管的特性参数,并将实时数据及实时数据所对应的X光和/或CT机的CT球管的特性参数传输至数字孪生系统2中;
驱动控制单元12,用于基于高压发生器10、X光和/或CT机性能的基本规律,并根据采集高压发生器10的实时数据动态调整高压发生器10的控制参数及保护参数;
故障保护单元13,用于基于数字孪生系统2的故障预警指令执行故障保护。
数字孪生系统2包括:
建模单元21,用于建立高压发生器10与X光机,或高压发生器10与CT机,或发生器与X光机和CT机的设备数字孪生模型;
训练单元22,用于将实时数据及实时数据所对应的X光和/或CT机的CT球管的特性参数传输至设备数字孪生模型中进行训练;
处理单元23,用于从设备数字孪生模型中获取历史数据和当前状态数据,并从历史数据和当前状态数据中获取高压发生器10的特征数据,并根据特征数据得到高压发生器10、X光和/或CT机性能的基本规律 ;
标签单元24:用于根据高压发生器10、X光和/或CT机性能的基本规律,为高压发生器10的特征数据赋予标签阈值,赋予高压发生器10、X光和/或CT机故障状态所对应的高压发生器10的特征数据阈值。
本申请还公开了一种电子装置,如图2所示,包括:存储器3、处理器4及存储在存储器3上并可在处理器4上运行的计算机程序,处理器4执行计算机程序时,实现上述基于机器学习的高压发生器控制方法。
本申请还提供了一种计算机可读存储介质,其存储有能够被处理器4加载并执行如上述基于机器学习的高压发生器控制方法的计算机程序,该计算机可读存储介质例如包括:U盘、移动硬盘、只读存储器(Read-OnlyMemory,ROM)、随机存取存储器(RandomAccessMemory,RAM)、磁碟或者光盘等各种可以存储程序代码的介质。
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。